基于STM32的智能小车防追尾系统
2018-04-03天津职业技术师范大学电子工程学院张重阳刘新月
天津职业技术师范大学电子工程学院 张重阳 刘新月 赵 欢 赵 雪
1.引言
现如今人民的生活质量大幅度提高,大量的汽车涌现,它已经成为寻常百姓家的代步工具,给百姓生活带来前所未有的交通方便,但是任何的科技都是一把双刃剑,有利即有弊,汽车带给我们的好处非常的多,但它的不足之处也逐渐的暴露出来:道路拥堵、安全隐患增多,停车位少,车辆多,造成供不应求等。从各个方面来说,这种状况都是我们不愿意见到的。根据现如今的交通状况进而分析数据得到一点:安全行车距离是最大的交通安全事故因素,进而引出智能小车安全控制系统的课题。智能小车是一种通过内部和外部的传感器感知自身状态和外部环境信息,在存在障碍物的相对比较复杂的环境中完成面向目标的自发性运动,从而完成任务职能的机器人系统。在我国对于移动的机器人的研究技术已经相对熟练,可能是因为开始比较晚,研究中的突破性的进步相对较少。在国外, 从上世纪机器人系统相关技术进行研究,有关于机器人移动的有关技术的科研成就已经相对成熟。清华大学最先致力于智能交通和智能汽车的研究,他们研究的主要方向全部集中到了车载微机、行驶安全、自主避障、汽车导航等几个方面。之后经过相关的鉴定,此项研究所涉及的几方面的关键技术如下:信息融合技术研究、智能移动机器人的设计和实现、路径规划的仿真技术研究、基于传感器信息的局部路径规划技术研究、传感技术、基于地图的全局路径规划技术研究。当前各种以STM32为核心的智能控制技术、各种传感器技术以及互联网等技术的迅速发展为解决现在的问题提供了切实可行的解决方案。
2.系统控制原理
智能小车采用差速驱动式的四轮轮式机构作为小车的机械结构,控制系统模块除了基本的电源模块、电机驱动模块,微控制器模块、障碍物检测模块、电机驱动模块、速度检测模块,外加了蓝牙通信模块、舵机驱动模块等。其控制系统具备了检测障碍物、实时监控定位、自主避障、蓝牙通讯等功能。
3.智能小车控制硬件设计
(1)电源系统设计(见图1)
本文设计的智能小车,控制电路和电机驱动电路是主要消耗能量的两部分。其中主控制电路部分使用+5V直流供电,驱动电机部分使用+12V直流供电。所以我们选用2节1.2V,2200mAh的锂电池串联作为系统的供电电源,电池组可以直接提供+12V的电压,而控制电路部分所需的+5V电压通过两个三端稳压块3090转换得到。
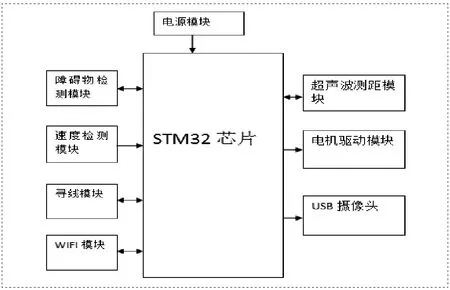
图1 系统总体框图
(2)微控制器模块设计
本文采用的是STM32F103主控芯片,它的特点主要是:1)功耗控制优良:增强型系列时钟频率达到72MHZ,是同类产品中性能最高的产品。在使用电池供电时,提供2.0-3.6V的低电压工作能力。当时钟频率为72MHZ时,STM32功耗了36W,是32位市场上功能最低的产品。2)先进的内核结构:STM32具有高性能,低功能、低成本的特点。3)高度的整合集成。STM32处理器能够最大程度上实现集成,对外部器件的要求极少。(它可以用来做系统的主时钟源,并且还有专门针对RTC的低频率RC电路)。4)具有功能创新的片上外设且性能出众。5)开发容易:STM32系列容易开发,可以使研发的产品迅速的进入市场。
STM32的最小系统电路主要由系统时钟电路、实时时钟电路、JTAG 调试接口电路,复位电路和启动模式选择电路组成。作为控制系统的核心,进行信息采集,处理数据和调节系统中其他模块。最小系统电路原理图如图2所示。
主要电路原理图的设计及功能如下所示:
1)系统时钟电路
系统时钟电路主要作用是提供节拍,就相当于人类的心脏跳动,随着心脏的跳动,血液就会到达全身部位,所以系统时钟的重要性就不言而喻啦。具体来说,时钟电路就是一个比较稳定的振荡器,振荡器产生的是正弦波,把该正弦波进行分频,处理,形成时钟脉冲,然后分配到需要的地方,让系统各部分工作时使用。本系统时钟电路由8MHZ的晶体振荡器构成。

图2 最小系统电路图
2)复位电路
本系统采用低电平复位。当按键悬空时RST 输入为高电平,当按键按下时,RST 脚输入为低电平,从而电路复位。
(3)障碍物检测模块设计
模块使用超声波传感器对小车运动过程中的障碍物信息进行检测。考虑实际情况,我们选用超声波传感器采用HC- SR04超声波测距模块,结构比较简单,,此测距模块可提供2cm~400cm的非接触式距离感测功能,测距精度高达3mm,测距较远,配合舵机可进行180度的旋转探测,即使车辆在恶劣的环境中对障碍物仍然有高度的识别。其工作原理主控制器给其与外界相连的端口TRIG提供一个15μs左右的脉冲触发信号。输入方波后,模块会自动发射8个40KHZ的声波并检验回波,一旦检测有回波信号,其与外界相连的另一个端口ECHO端则输出回响信号,在主控制器端产生中断。发出触发信号到收到回响信号的时间间隔通过主控制器内部通用的定时器可以计算,根据声音在空气中的速度为344米/秒,从而可确定障碍物的距离。
(4)电机驱动模块设计
智能小车的驱动轮分别由两个直流电机单独驱动,驱动机的转速由主控制器内部的通用定时器输出来控制。调脉宽的方式有3种,在这里我们采用定频调宽的方式。定频就是指开关元件的开,关频率固定不变,也就是开,关周期T固定不变,调宽是指通过改变斩波电路的开关元件导通的时间T来改变导通比值,从而改变输出电压的平均值。因为小车转动方向需要调整电压的极性而且直流电机工作所需的电压、电流较大,所以我们应该使用专门的电机驱动电路来进行控制。这里我们使用L298N专用电机驱动芯片作为小车左、右驱动轮的直流电机的核心功率模块。L298N为四重推挽驱动电路,可控制2个直流减速电机。主控制器通用计时器输出二路PWM信号给EN端(电机使能端)。假使高电平为1,低电平为0,当电机使能端输入为1的时候,电机处于使能状态,当电机使能端输入为0时,电机就停止。另外使用四个I/O引脚与L298N的4个输入引脚相连,用于改变电机的转速和方向。再将其2个输出端口分别与两个电机的输入端相连来带动电机转动。
(5)速度检测模块设计
小车速度检测通过速度传感器来实现,即电机的转速通过检测单位时间的脉冲数来判断,这里我们采用了增量光电编码器,(即增量式编码器,将位移转换成电信号,再将电信号转变为计数脉冲。)分辨率为200欧姆。随着被测轴一起转动,一个周期内编码器会在固定位置上产生一个脉冲。速度检测采用f/T法。在车速控制上,引入PID控制,PID控制想要实现对路径的识别和控制,一定要保持系统电量,PID其实就是测量,智能小车行驶中通过红外线获得道路信息,从而进行数据比较,找到误差并进行调整,得到道路运行参数。通信扩展模块设计主控制器STM32F103C有USART、CAN、SPI和USB这些通信外围接口用来扩展。系统的有线通信模块使用CAN总线,CAN总线控制器嵌在主控制器STM32F103内, 以此为小车之间提供可靠的有线通信;而无线通信模块主要是通过串行接口(PLC)扩展的无线射频模块DATA-6106。
4.智能小车控制系统的软件设计
本设计中小车有两种控制方式,一种是自主行进,另一种则是通过蓝牙远程指令控制,如果传感器在小车运动的时候检测到信号,则依照左边、正前方、右边来辨别和障碍物的距离,进而获得相应的定位信息,接下来通过改变输入信号大小,转动速率和运动方向,进而改变小车的速度,免于小车和障碍物碰撞,继续行进。图3就是智能小车控制系统的主程序流程框图。
我们现在使用的主要是模糊控制器,位置式PID控制器以及增量式PID控制器和最优化控制器。传统的控制器有增量式PID控制器和PID控制器,多数的控制对象和应用都能用一个数学模型来精确的描述,因为循迹避障小车不仅受到电机性能,机械的特性这样的机身影响而且路面粗糙等外在影响也会存在,总而言之,小车的整个系统都是存在未知性的。在这种情况下我们选用了模糊控制,测量结果显示,如果采用以往的方式,小车的灵敏程度会有所降低。
模糊控制器不需要被控制对象拥有精确的数学模型,而且其控制算法灵活性强并且在系统中能够呈现滞后性,非线性等复杂的可控制系统中的优势是很明显的。模糊控制器的结构如图4所示。
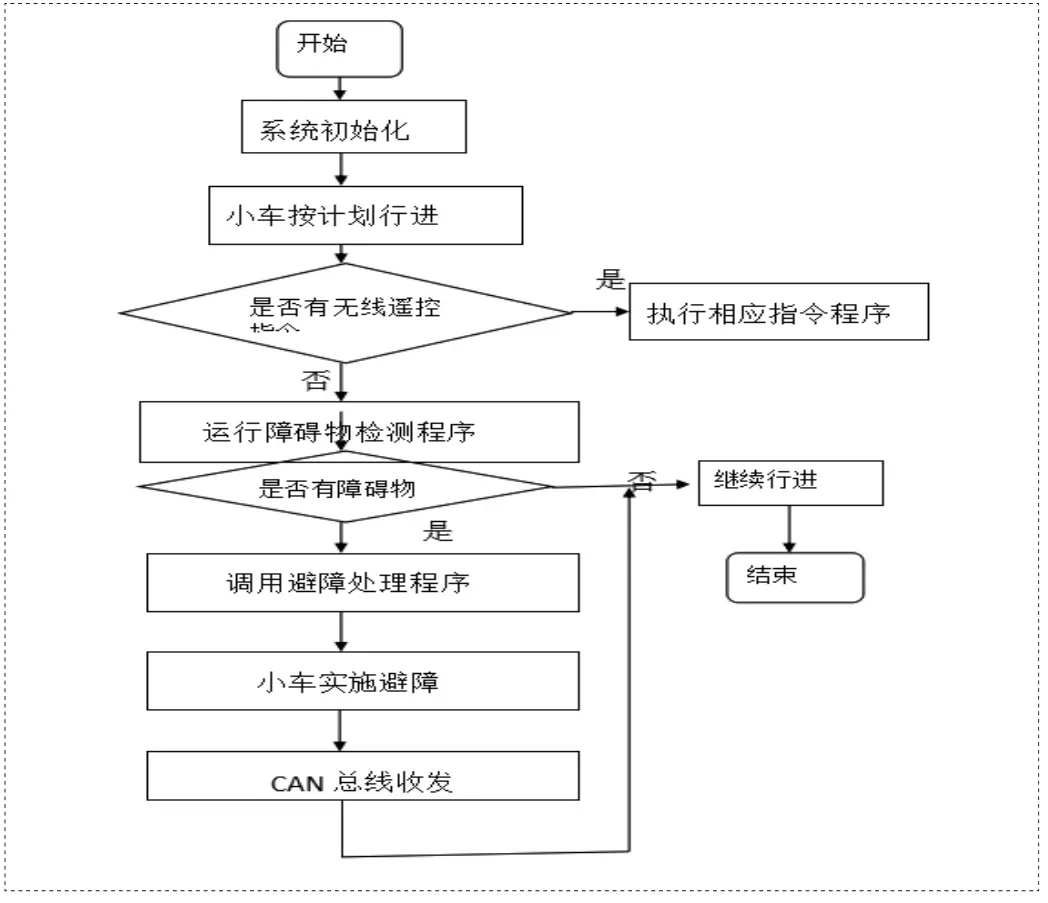
图3 系统主程序流程图

图4 模糊控制器的结构
本小车的模糊控制器采用了双输入单输出的基本模糊控制结构,如图5所示。

图5 模糊控制器的结构
5.结论
智能小车技术是一项具有广泛应用前景的技术,不仅在我们的日常生活中,在工业上还是在军事上,智能小车也发挥着重要的作用。本文在充分考虑智能小车系统结构的基础上,设计了基于单片机STM32F103的智能小车运动控制硬件电路。在电源模块、微处理器模块(STM32)、障碍物检测模块、电机驱动模块、速度检测模块等各个模块的协同作用下,智能小车在正常前进,转弯的基本功能之下,还可以在一定程度上自主变速,防止驾驶者在倒车或者在大雾天气中因为没有及时变速引发的碰撞,舵机180度的旋转探测也进一步避免车辆与各个方向的障碍物相撞。
[1]李根.基于STM32的车辆智能安全行车控制系统[D].天津职业技术师范大学,2016.
[2]周柱,孟文,田环宇.基于STM32的智能小车设计[J].技术与市场,2011,18(06):1-2+4.
[3]潘元骁.基于Arduino的智能小车自动避障系统设计与研究[D].长安大学,2015.
[4]唐浩宇,谢天,张辉辉.采用STM32的智能小车开发实现[J].福建电脑,2016,32(02):126-128+156.
[5]朱三超.自主追踪防追尾智能车设计[J].贵州科学,2014,32(02):31-34.
[6]Hua Kuang,Zhi-Peng Xu,Xing-Li Li,Siu-Ming Lo.An extended carfollowing model accounting for the average headway effect in intelligent transportation system[J].Physica A:Statistical Mechanics and its Applications,2017,471.
[7]Hongtao Yu,Sen Wang,Heyan Wang,Yanhua Lei.Design of Experimental Platform for Intelligent Car[P].2016 7th International Conference on Education,Management,Computer and Medicine(EMCM 2016),2017.
