闸墩水平位移监测基准选择分析
2018-03-31王守春
王 守 春
(天津市水利科学研究院,天津 300061)
1 常用的水平位移监测方法
水平位移是指闸体轴线的纵向水平位移和垂直于闸体轴线的横向水平位移。一般情况下,比较关心的是横向水平位移,所以常用的观测方法有前方交会法、视准线法、引张线、激光准直法等[1]。交会法适用范围最广,但其监测及资料整理相对复杂,前方交会法的观测对设站点的位置要求不高,所以比较灵活,而且能够同时获得各监测点的纵向水平位移和横向水平位移。但是,该方法精度不高。而其他几种方法只能获取横向的水平位移。
2 多测回测角观测方法
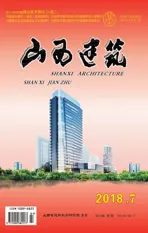
该方法在监测点附近架设全站仪,采用自由测站边角交会法进行测量,同时联测附近的控制点,然后通过数据处理获得监测点坐标的一种方法。该方法与传统的边角网测量有很大差异,传统的边角网测量均是把仪器架设在已知的控制点上进行观测,而多测回测角的方法无需把仪器架设在已知的控制点上。自由设站多测回测角观测的网型图如图1所示。

(1)
(2)
基坑监测点的坐标中误差及其点位误差分别为:
(3)
为了提高观测值的精度,一般还要进行气象改正。
3 观测基准对多测回测角精度的影响
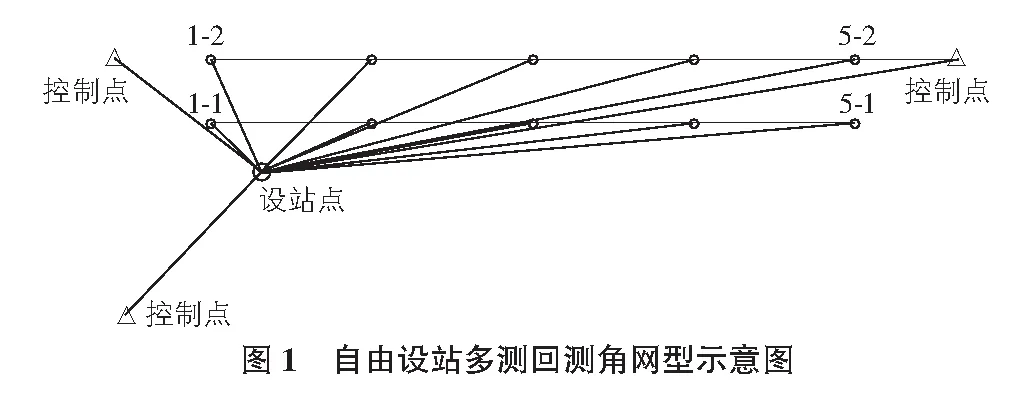
本部分结合天津市海河二道闸闸墩的水平位移监测情况进行分析。本监测项目采用徕卡全站仪(TS30),测角精度0.5″,测距精度0.6 mm+1 ppm。天津市海河二道闸闸墩水平位移监测的网型图如图1所示。三个控制点的基础埋深约为1.5 m,而且与闸体建设不是同一时期,加之距离控制50 m内频繁有车辆经过,所以结合实测的数据初步判断该监测网中3个控制点的稳定性比较差。部分监测点坐标的变化过程线如图2~图5所示。
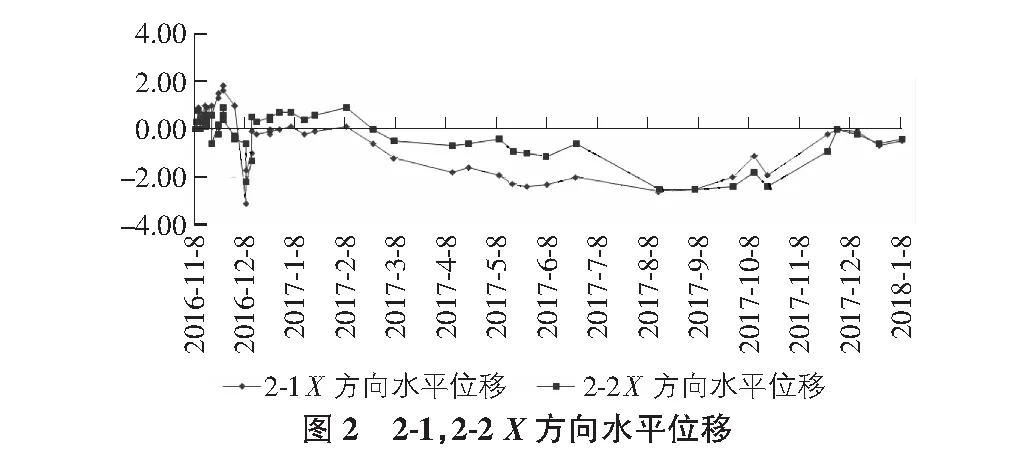
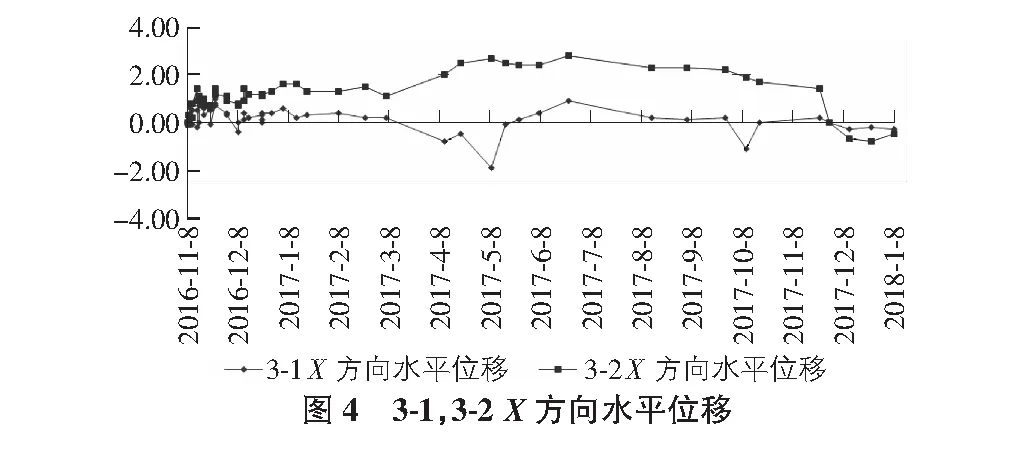
从图2~图5可以看出,2016年11月8日~2017年11月30日的变化过程线波动较大,特别是图5中3-2Y方向的波动达5 mm之多,这显然与实际是不符的。因为,该闸建成于1985年,各闸墩均有桩基,所以各闸墩经过30多年之后应该比较稳定,Y方向(水流向)的水平位移变化量不会在短期内(2016年11月~2017年1月)达到5 mm。
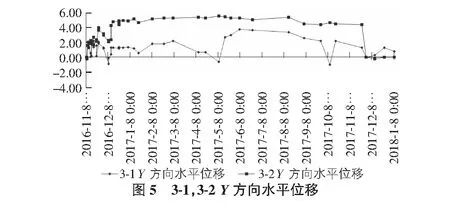
鉴于分析过气象改正误差对监测精度的影响分析,所以可排除掉气象改正的因素。于是,舍弃监测网中的控制点,取监测点中的1-1,5-2两个点作为平差的起算点,可以得到各监测点相对的水平位移。如图2~图5中2017年11月30日之后的变化过程线,该部分的变化过程线的波动均在1 mm以内,这与理论计算的误差是相符的。
4 结语
在采用全站仪对闸墩进行水平位移监测时,若控制点不够稳定,则可选取分布在监测网两端的两个监测点作为平差计算的起算点,从而可以得到各监测点相对所选定监测点的位移变化过程线。而且,相比传统的视准线法只能获取各闸墩水流向的水平位移,采用自由设站多测回测角的方法进行监测时,则可同时获取各闸墩监测点的水流向和垂直于水流向的水平位移。
参考文献:
[1]徐高飞,许小杰.浅谈水工建筑物表面水平位移监测方法[J].浙江水利科技,2007(4):54.
[2]杨雪峰,刘成龙,罗雁文.基于自由测站的基坑水平位移监测方法探讨[J].测绘科学,2011(5):154.