基于单片机液位控制系统的研究与设计∗
2018-03-31张小娟常豪豪
张小娟 高 蕊 常豪豪
1 引言
在现代工业生产过程中,容器中料位状态往往决定着所要生产的产品质量的高低。容器中物料的状态一般有料位,温度、浓度[1]等都十分重要,所以研究生产过程这些控制量对于生产过程自动化实现往往具有十分重要的意义。以液位为研究对象,生产过程[2]中一般要保障容器里的原料、产品或半成品的数量,来确定生产过程各环节物料平衡以及为进行经济核算,首先应该有能够检测该容器液位的装置提供的依据,另外还有可靠的控制方式来改变容器原料的数量;以及对液位的实时测量,掌握液位在规定的波动范围内波动情况,进而及时调整正常生产状态[3]。液位测量在工业生产过程中已经的格外重要而且逐渐成熟。特别是对液位测量,能够帮助确定液位或物位的高度,实现数字化和智能化接轨以便于其他工作的有序进行。
2 系统的总体方案设计
本系统是基于单片机的超声波液位[4]测控系统主要由单片机、时钟、复位电路组成的最小系统和测温、按键电路、超声波模块、显示、报警及控制电路等组成。硬件系统的框图如图1所示。
本装置在使用范围内,根据使用场合先确定探头距容器底部安装高度,然后设定液位波动范围,后投入运行,在运行时也可设定液位波动范围,此时电机被自锁不会动作,系统会给予状态提示,设置完毕退出设置模式后电机恢复正常执行。

图1 超声波液位测量系统框图
3 超声波液位测控系统
3.1 超声波测液位原理
超声波液位[5]测量的原理也就是基于测距原理,即是超声波探头测到距液面的距离,如果超声波探头经过特殊处理安装在容器的底部时,测得的距离就为液位的实际高度,如果探头安装到容器液面的上方,需要通过单片机换算来得到液位高度(液位的高度为超声波探头相对于容器底部距离减去实际测到的距离),本设计考虑到实际应用的方便性,选择把超声波探头装到容器液面的上方。同时,本设计兼有按键切换测距功能。
此系统的实现算法原理设计由图2参考可知,液位换算公式:

式中:H为探头到所测容器底部的距离,需要安装好完后提前测量;S为本系统在工作过程中探头到实时液面所测得到的距离;h即为所要检测的液位。

图2 测液位原理
3.2 电机控制原理
液位控制之前首先要确定现场容器液位[6]允许波动的范围,在安装完成之后可以通过键盘设定其液位的上下限,然后系统投放运行后,由单片机根据实时采集到液位高度控制电机工作及其状态指示,即当液位低于下限时,给于状态提示以及顺时打开电机,当高于下限在液位波动范围内,状态灯关闭以及电机反转关闭。当液位高于上限,目前只提供状态提示可为以后扩展用。
本系统工作基本流程图如下:
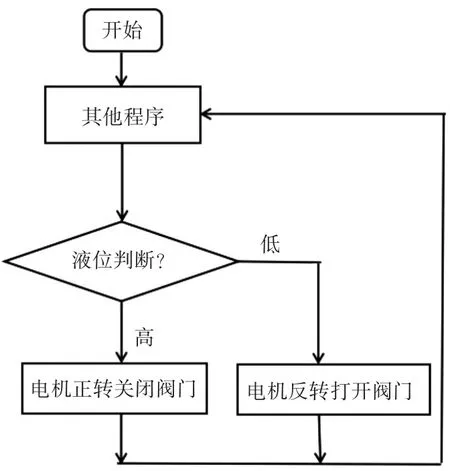
图3 电机控制原理
4 系统主要硬件设计
4.1 单片机最小系统电路
单片机可以用最少的外围电路所搭建起来的可以工作的电路系统被称为最小应用系统,一般可称为单片机的最小系统。51系列单片机最小系统一般应该有单片机、电源、时钟和复位电路构成。
4.2 超声波测距模块
HC-SR04为超声波测距[7]集成化模块,非常简便好用,此模块共有4只引出脚,从左往右,第一只脚VCC为工作电压为5V和单片机共用同一电源;第二只脚TRIG为输入触发信号,接在单片机的P3.6脚;第三只脚ECHO为输出回响信号,接在单片机的P3.7脚;第四只脚GND为接地端,如图4实物及规格。
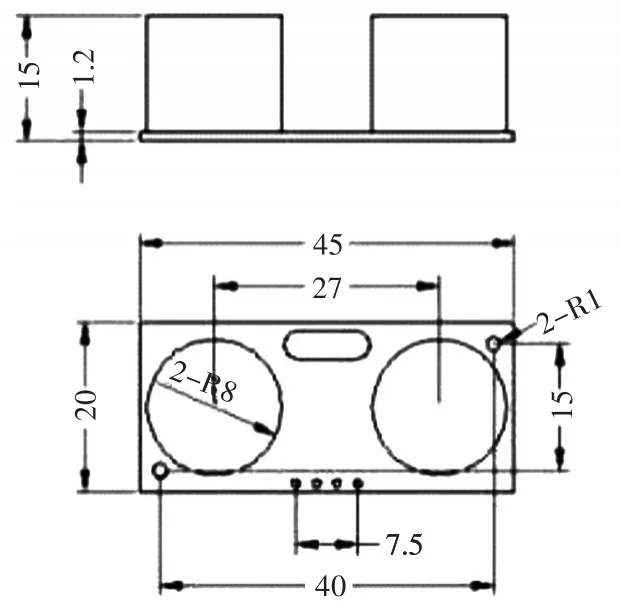
图4 实物图规格
HC-SR04超声波模块是已包含发射、接收和控制电路,可提供4cm~400cm检测距离范围,而且精度可高达3mm,使用起来比较简单。其超声波时序图如图5。

图6 超声波时序图
本次设计系统控制电路主要有步进电机,驱动电路和状态指示灯组成。状态指示灯即是对操作过程,以及工作状态的指示作用,让本系统操作更具人性化;驱动电路即可以提高电机的负载能力;将电机转动情况作为模拟阀门的动作机构的状态,其特点是可以将电脉冲信号转换为角度(模拟水泵的开度)的机电式数模转换器。
5 系统软件设计
5.1 系统软件编译开发环境
Keil软件[8]当前是单片机程序开发最热的软件,其功能强大,可用于C语言程序、汇编源程序的编写和调试等。本次设计,将使用μVision4版本作为软件编程开发环境,来完成程序编写及调试。
5.2 超声波模块操作过程
超声波[9~11]模块通过接收到单片机发送的触发脉冲信号,模块自动的发送和接收超声信号,同时将测到的脉冲宽度反馈给单片机,让其计算时间。如果距离过远或没有接收到返回信号,单片机内部给予溢出处理,1602显示屏并显示888.8作为错误判断。部分程序如下:
/*============================================
HC-SRO4超声波测距模块DEMO程序
校验数据
最小测距时间0.04m/340=117.647us lcd显示 2cm
4/340=11764.706 us 200cm
8/340=max23529.412 us 400cm
/***********计算显示距离函数**************/
void Conut(uint lev)
{
Table1[0]=lev/1000+0x30;//显示百前值
4wei
Table1[1]=lev%1000/100+0x30;//显示十前值
Table1[2]=lev%100/10+0x30; //显示个前值
Table1[3]='.'; //显示当前值
Table1[4]=lev%10+0X30; //显示h前值
if(Table1[0]=='0')
{Table1[0]=''; //如果百位为0,不显示
if(Table1[1]=='0')
{
Table1[1]=''; //如果百位为0,十位为0也不显示
}
}
se=lev/10;// 3wei se=S/10;
wr_com(0x89);
wr_dat(Table1[0]); //显示百位
wr_com(0x8a);
wr_dat(Table1[1]); //显示十位
wr_com(0x8b);
wr_dat(Table1[2]); //显示个位
wr_com(0x8c);
wr_dat(Table1[3]);
wr_com(0x8d);
wr_dat(Table1[4]);
}
6 系统制作及仿真调试
本设计使用此软件创建工程,然后进行程序编写,程序调试完成后生成。HEX文件作为单片机可执行程序,调试结果如图7所示。
单片机可执行文件即二进制机器代码,对应于用Keil软件编译过后的生成的。HEX文件,仿真结果,例如P3.7假如用一个频率一定的脉冲来代替,检测其脉宽时间,即是HC-SR04模块引脚ECHO返回信号的输出,显示P3.7口信号的产生情况。
校验数据:
假设在(15℃下)声速340m/s测量,则根据原理要测到的脉宽时间t应为
LCD显示2cm,t=0.04m/340/1.0851=108.42μs;
LCD显示20.0cm,t=0.4m/340/1.0851=1084.2μs;
LCD显示200cm,t=4m/340/1.0851=10842μs。
当 t=0.4m/340/1.0851=1084.2μs时,仿真结果图如图8所示。

图7 Proteus仿真结果
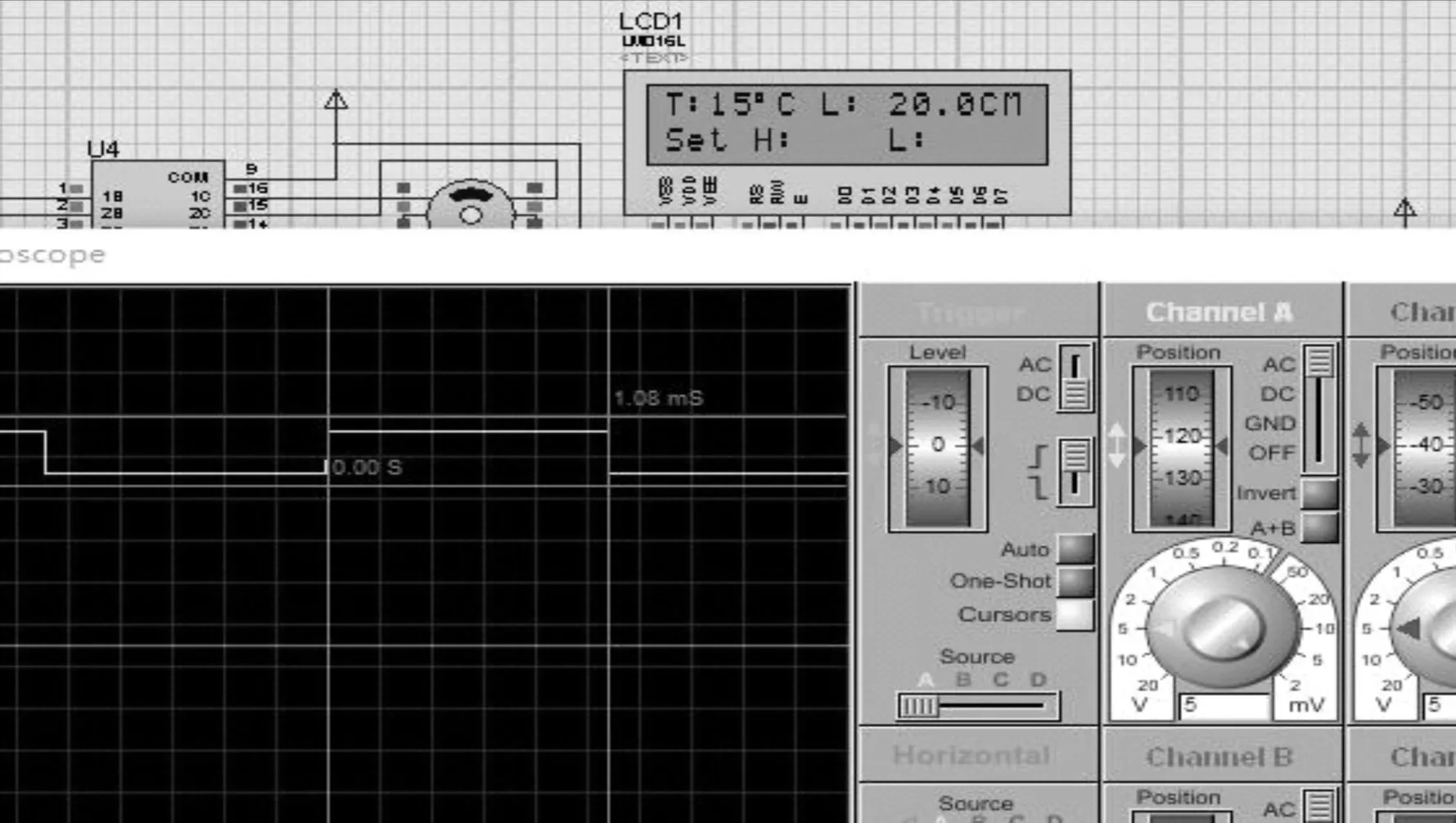
图8 波形时间及结果
从上图看出,P3.7口输出了信号脉宽时间1.08ms,LCD1602显示正确,软件仿真结果说明设计信号采集与理论相符,非常准确;然后控制部分,通过按键设定液位波动范围,模拟液位越限情况,发现结果与理论相符。
7 结语
本此课题为液位[12]测控系统的研究与设计,在设计中,本系统由STC89C52单片机搭建的最小系统系统和超声波传感器模块、4个键盘、DS18B20、LCD1602显示、报警系统和步进电机等外设组成,具有设置上下限、超限报警、自动控制步进电机(模拟阀门的开度)等功能。在运行的时候,系统会根据现场的液位控制要求来判断,液位低于下限时,系统打开外接水泵进行注水,直到液位[13]符合现场控制要求时停止。另外为了提高了系统的测量精确度,使其具有一定的抗干扰能力,STC89C52单片机需要通过对超声波所处的环境温度进行采样,依据其在空气中传输的关系,然后进行数据处理及控制,来达到声速的补偿,超声波液位检测模块测量精度达到3mm。
[1]胡皓.单容水箱液位控制研究[J].新技术新工艺,2012(12):88-90.
[2]张宗强.基于Java Applet的液位PID控制仿真[J].工业控制计算机,2011(9):28-30.
[3]聂朋,麻永林,邢淑清,姜涛,孙彬彬.基于LabVIEW的电磁波峰焊非接触液位测量系统[J].传感器与微系统,2016(8):108-110.
[4]孙娟.基于DSP的超声波液位计的研制[D].南京:南京信息工程大学,2005.
[5]温晶晶,任立宗.在工业容器领域超声波液位测量技术的现状和发展趋势[J].中北大学学报,2007(21):124-126.
[6]刘树东,潘万平.基于步进电机的阀门闭环控制的仿真[J].煤炭技术,2010(5):47-49.
[7]高飞燕.基于单片机的超声波测距系统的设计[J].信息技术,2005(7):128-129.
[8]何小英.基于Keil和Proteus的单片机课程改革[J].中国机械,2014(13):49-50.
[9]席细平,马重芳,王伟.超声波技术应用现状[J].山西化工,2007(1):25-29.
[10]贺瑞强,王民.基于AT89S51单片机的超声波测距系统的设计与研究[J].榆林学院学报,2009(2):54-56.
[11]常小凯.基于一种高精度超声波测距仪的研究[J].科技创新与应用,2013(24):40-45.
[12]樊秀云,袁嗣杰,张合敏.伪码数字相关在超声波测距中的应用[J].装备指挥技术学院学报,2002(3):77-80.
[13]梁子剑.浅析超声波传感器及其应用[J].商情,2013(35):35-36.
