电控小车方案设计比选
2018-03-30马晓欣冯小东
马晓欣 冯小东 康 凯
(河北建筑工程学院,张家口 075000)
1 竞赛介绍
1.1 竞赛命题
竞赛命题为“重力势能驱动的自控行走小车越障竞赛”。笔者自主设计一种符合本命题要求的小车,经赛场内外分步制作完成,并进行现场竞争性运行考核。下面将重力势能驱动的自控行走小车简称电控小车。
1.2 命题要求
小车:三轮结构,其中一轮为转向轮,另外二轮为行进轮,(要求2个行进轮用1.5mm厚度的钢板或可用激光切割加工且不超过8mm厚度的非金属板制作,要求行进轮轮毂与轮外缘之间至少有40mm的环形范围,这个范围将用于进行统一要求的设计和激光切割),允许二行进轮中的一个轮为从动轮。小车可具有赛道障碍识别、轨迹判断及自动转向功能和制动功能,这些功能可由机械或电控装置自动实现,不允许使用人工交互遥控,如图1所示。

图1 小车示意图
小车行进所需能量:只能来自给定的重力势能,小车出发初始势能为400mm高度×1kg砝码质量,竞赛时使用的同一规格标准砝码(钢制Φ50mm×65mm)。若使用机械控制转向或刹车,其能量也需来自上述给定的重力势能。
电控装置:主控电路必须采用带单片机的电路,电路的设计及制作、检测元器件、电机(允许用舵机)及驱动电路自行选定。电控装置所用电源为5号碱性电池,电池自备,比赛时须安装到车上并随车行走。小车上安装的电控装置必须确保不能增加小车的行进能量。
1.3 赛道
赛道宽度1.2m,形成长约15.4m、宽约2.4m(不计赛道边缘道牙厚度)的环形赛道,其中两直线段长度为13.0m,两端外缘为曲率半径为1.2m的半圆形,中心线总长度约30m,如图2所示。
赛道边缘设有高度为80mm的道牙挡板。赛道上间隔不等(随机)交错设置多个障碍墙,障碍墙高度约80mm,相邻障碍墙之间最小间距为1m,每个障碍墙从赛道一侧边缘延伸至超过中线100~150mm。
在直赛道段设置有1段坡道,坡道由上坡道、坡顶平道和下坡道组成,上坡道的坡度3°±1°,下坡道的坡度1.5°±0.5°;坡顶高度40±2mm,坡顶长度为250±2mm。坡道位置将事先公布,出发线在平赛道上,距离坡道起始位置大于1m,具体位置抽签决定。
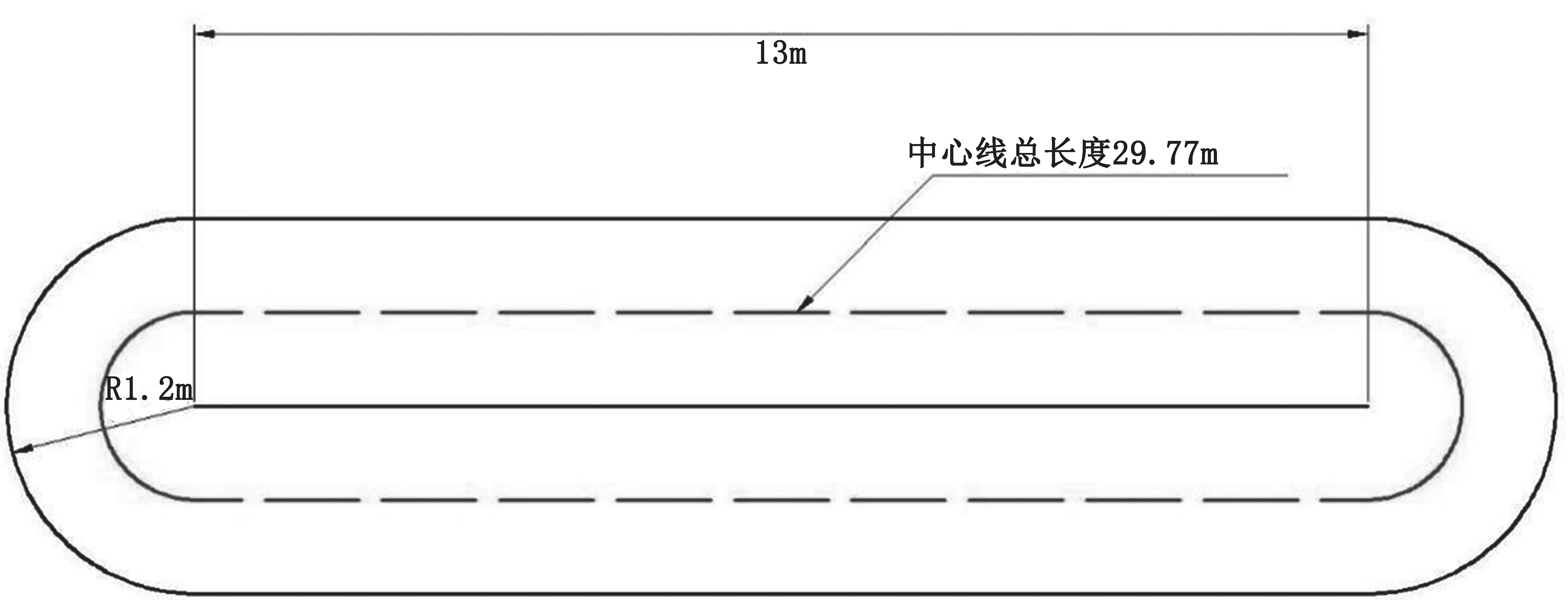
图2 赛道示意图
2 方案比较
2.1 传动及变力矩方案
2.1.1 多级传动
多级传动是指在提吊重块的绳索和车轮轴之间还有传动介质(形式)的传动,通过改变多级传动的传动比来改变驱动力矩。多级传动的中间传动介质增加了能量的消耗,传动效率较直接驱动低。
2.1.2 直接驱动
直接驱动是指重块下落的重力势能直接通过提吊重块的绳索驱动车轮轴实现转动的传动结构方案,通过锥形绕线轮来改变驱动力矩。直接驱动的特点是能量损耗小,传动效率高。
2.2 车轮驱动方案
2.2.1 前轮驱动方案
车轮布局为前面两个轮、后面一个轮的三角形结构,此结构前车轮为驱动轮,后车轮为转向轮,前车轮可采用任意一个车轮为主动轮,另一个为从动轮;也可以采用差速器结构,两轮均为主动轮。有差速器的结构,左右转向速度一致,没有差速器的结构,左右转向速度变化大,有差速器的结构转弯运行更加平稳。
2.2.2 后轮驱动方案
车轮的布局为前面一个转向轮、后面两个驱动轮的三角形结构,此结构后车轮为驱动轮,前车轮为转向轮,后车轮可采用任意一个车轮为主动轮,另一个为从动轮;也可以采用差速器结构,两轮均为主动轮。
2.3 避障寻迹方案
2.3.1 沿一侧寻迹方案
该方案通过传感器检测前方和一侧的障碍物,将信号反馈给单片机,由单片机控制舵机转向即可实现避障,对于传感器的数量需求少,编程也较中间寻迹方案简单。小车每避过一个障碍所行走距离长。
2.3.2 中间寻迹方案
该方案需要传感器检测前方和两侧的障碍物,同样将信号反馈给单片机,由单片机控制舵机转向即可实现避障,对于传感器的数量需求多,编程也相对复杂一些。小车每避过一个障碍所行走距离与沿一侧寻迹方案相比要短。
2.4 转向机构方案
2.4.1 机械传动结构控制方案
该方案传动结构与舵机控制方案相比,具有结构复杂的特点,增加了电控小车的整体重量。不使用重块的重力势能驱动,需要用到电机或者舵机等电力驱动装置。使用重块的重力势能驱动,消耗了小车向前行走的一部分能量,降低了小车的行走距离。
2.4.2 舵机控制方案
采用舵机控制转向轮的转角,结构简单,控制方便,转向机构不消耗重块的重力势能,转向节省的重块势能能量将用于小车行走。
2.5 刹车结构方案
2.5.1 机械控制刹车方案
该方案刹车消耗小车的重块的重力势能,小车需要的刹车一般处于下坡路段,小车的行走可靠车身的自重来驱动,此刹车结构增加小车结构的复杂程度。
2.5.2 电磁刹车方案
与机械刹车方案相比,该方案结构更加简单。电磁刹车的力需要克服小车自重和重块重力势能的驱动力之和,需要考虑5号碱性电池的能量大小。
3 方案选择
通过以上方案的比较,电控小车的传动方案宜选择直接驱动方案,前轮驱动和后轮驱动均可,应该加装简易差速器,采用按照中间路线行走的方案,可以提高小车的避障碍数量。转向机构采用直接用舵机控制转向的方案,在电池能量满足转向和刹车力的情况下,优先选择电磁刹车方案。该方案能量损失较小,行走距离较长,避障平稳且数量较多。
4 结语
进行电控小车方案设计比选,为电控小车的设计和方案选择提供了参考和借鉴。
