微型旋翼无人机在水蚀外业调查中的应用
2018-03-29曾麦脉杨健新刘超群俞国松
曾麦脉, 杨健新, 刘超群, 俞国松
(1.珠江水利委员会 珠江流域水土保持监测中心站, 广东 广州 510611;2.珠江水利委员会 珠江水利科学研究院, 广东 广州 510611)
主要的水蚀评价方法可以分为3类,分别是抽样调查、遥感调查、无缝隙网格估算[1]。中国主要采用抽样调查和遥感调查的方法,截至2015年,中国开展了4次大规模的水土流失普查工作,其中,20世纪50年代开展的第一次普查采用的是人工调查的办法,20世纪80年代开展的第2次普查和1999年开展的第3次普查采用的是遥感调查的方式[2],2011年全国第一次水利普查中的水土流失普查采用的是抽样调查结合土壤侵蚀方程模型定量计算的方法[3]。
各种水蚀评价方法都需要外业调查环节,以采集样本或验证数据。特别是在抽样调查方法中,外业调查的任务尤为艰巨。一方面体现在工作量大,消耗时间长,另一方面体现在工作难度大,数据准确度和精度难以控制。本文拟通过微型旋翼无人机及摄影测量技术的应用,来改进水蚀外业调查技术。
1 现有外业调查方法的不利因素
在水利普查工作中,水蚀野外调查单元的基本调查流程为:首先在内业准备调查底图,打印出来;实地调查时根据GPS、地形等位置参考,勾绘地块,填写调查表格;回到内业后重新清绘地块边界,扫描后再数字化录入。
该外业调查工作存在2方面不利因素: ①工作量大,外业调查工作的效率难以提高。首先,由于调查单元的布设为抽样平均分布,不考虑交通条件,很多情况下,调查单元的到达就需要很长时间,某些时候由于河流和地形的阻隔,虽然直线距离已经很近,却需要绕道很远的距离。然后,到达调查单元后,需要逐地块进行勾绘,这个过程耗费时间较长,特别是地块破碎的平地区域。由于经费的制约,野外调查单元布设的密度受限,对最终成果的精确性,形成了负面影响。 ②难以准确勾绘地块边界。在现场勾绘的过程中,可以提供边界参考的是地形图和GPS位置。对于等高线稀疏的区域,地形图的参考作用会大大削弱,而坡面峡谷区域,人员往往难以到达,无法用GPS位置确定边界。从而使边界勾绘的误差难以控制和评估,进而增加了最终成果的不确定性。
在抽样调查方法中,使用调查单元的数据来推算区域内的数据,所以调查单元调查的准确性、布设的密度对结果的可靠性影响重大。当前外业调查工作的模式,在工作量和准确性方面都对项目的开展形成了制约性因素。外业调查环节的技术革新,将有效的促进抽样调查方法在水土流失评价中的应用。
2 微型旋翼无人机外业调查方法
微型旋翼无人机产品和摄影测量技术的发展[4],为外业调查技术的革新创造了条件。使用无人机在高空连续拍摄具有一定量重叠度的照片,覆盖调查单元区域。利用摄影测量技术,得到三维模型,进而得到正射影像和DEM数据[5-6]。利用无人机航拍获得正射影像数据,本质是将无人机航拍的照片处理成具有空间地理信息的影像数据等产品,其中的一项关键技术是空三解算,属于航空摄影测量技术领域。在航测领域,为生产符合要求的产品,对相机内方位元素、镜头畸变、飞行姿态相关的外方位元素、航线架构、地面控制点布设等方面都有比较高的要求。而消费级的微型无人机,如大疆的精灵系列无人机,体积小、质量轻、使用非量测相机、飞行高度低,虽然可以获得比较高的分辨率,但是影像畸变和姿态角大、像幅小、基高比小,使之难以满足传统摄影测量空三解算规范要求。融合了计算机视觉相关技术成果的基于多视图几何的空三解算方法的出现,克服了传统摄影测量对大倾角影像空三解算的局限性,使消费级的微型无人机在水蚀单元外业调查中的应用成为了可能。
2.1 航测流程
利用微型旋翼无人机开展水蚀野外调查单元的外业调查工作,一项主要任务是利用无人机拍摄的照片,生产正射影像及三维模型等数据,其航摄工作流程包括任务规划、数据获取、数据处理等3项。
2.1.1 任务规划 根据所需成果影像的比例尺需求,逐一确定地面分辨率、无人机飞行高度、摄影基准面、影像重叠率、摄影基线等内容。
以DJI Phantom 3 Advance无人机系统为例,其搭载的航拍相机的传感器为1/5.84 cm(1/2.3英寸)SONY EXMOR,f/2.8(20 mm等效焦距),照片像素分辨率4 000×3 000,在200 m的高度时,所拍摄影像的空间分辨率优于0.1 m,符合1∶1 000成图比例尺对影像地面分辨率的要求[7],可以满足水蚀调查单元地块划分和信息提取的需要。微型旋翼无人机拍摄高度与拍摄范围、分辨率等关系如表1所示。

表1 Phantom3 Advance无人机系统拍摄高度与分辨率关系
注:传感器实际尺寸6.16 mm×4.62 mm; 转化系数5.619; 数据为单张照片拍摄范围。
摄影基准面用于明确影像分辨率所对应的平面,从而明确飞行高度相对于起飞点的相对航高。通常以测区的平均高程面作为摄影基准面。考虑到生产三维模型的需求,一般航向重叠率、旁向重叠率分别在80%和60%左右。摄影基线指相邻两曝光点相机中心的连线。摄影基线的长度可由确定的影像重叠率、航高和影像的像幅尺寸计算获得,该项参数用于确定相机的拍照间隔。现代的地面站软件可以自动规划航线并计算大部分的参数,用户只需要设定拍摄区域、地面分辨率、航向与旁向重叠率等参数即可。
2.1.2 数据获取 主要包括影像数据的获取和地面控制点数据的获取,影像数据获取主要考虑天气和起降场地的要求,然后将规划好的航线数据传输至无人机飞控系统,起飞无人机获取影像数据。之所以选择旋翼无人机就是因为其对起降环境要求低,而微型旋翼无人机成本低,运输使用方便,受空域监管制约小,是适应于本应用的机型。
地面控制点用于控制成果位置精度。在传统测绘行业中,往往需要大量的地面控制点来保障测绘精度等级。但是在利用无人机小区域航测数据基于多视图几何空三解算时,在算法原理上对构网方式的稳健性提供了一定程度的保障,根据李明慈[8]的试验,在四周和中间布设5个平高控制点即可满足1∶1 000的成图比例尺对空三解算精度的要求。即便如此,测量地面控制点都是一项繁重的工作。考虑到调查的空间抽样性,绝对定位精度的偏差对抽样特性的影响不大,可以不布设地面控制点。必要的时候,可以用基准影像进行影像至影像的配准[9]。
航拍的数据成果最少包括2项: ①按所需重叠率采集到的航拍照片; ②每个拍照点的GPS位置信息(照片EXIF文件中或独立文件保存)。在设备支持的情况下,还可能有俯仰、横滚、航向等外方位角数据。拍照点位置与角度数据的精确程度,对最终成果的位置精度起着重要作用。(例如极飞C 2000测绘微型旋翼无人机,集成了RTK,在无地面控制点的情况下,正射影像成果的位置精度可以达到分米级)。
2.1.3 数据处理 利用集成了多视图几何空三解算方法的软件,对航拍的数据成果进行自动化的处理,通过几何处理、多视匹配、三角网(TIN)构建、自动赋予纹理等步骤,生成三维模型、正射影像、DEM等数据成果。基于多视图几何的空三解算方法可以解决微型无人机影像相对定向中存在的姿态角过大的问题,在自检校光束法平差环节可以推算出影像外方位元素、物方点坐标和平差后的相机文件,所以对于消费级的微型旋翼无人机,即使航拍数据成果中没有拍照点的外方位角数据,也没有精确的相机镜头检校数据,也可以推算出相关参数并生产最终成果。正是数据处理技术的进步,使得微型旋翼无人机的行业泛测绘的应用成为了可能。该类处理软件有PhotoMesh,Context Capture(原Smart3 D),Photoscan等。
2.2 水蚀调查单元无人机外业调查
结合水蚀调查单元信息采集需求,水蚀调查单元外业调查流程可分为调查区航测、特征照片航拍、数据处理、信息提取几个部分。调查区航测的目的是生产正射影像图以及辅助的三维实景模型数据,用于勾绘地块、提取土地利用类型、植被覆盖度、工程措施、部分生物措施与耕作措施等信息。以大疆无人机和平板端的地面站软件系统为例,调查区航测以水蚀调查单元为航测区域,将调查单元边界矢量文件导入地面站软件,设置地面分辨率10 cm左右,航向重叠率80%,旁向重叠率60%,自动生成航线规划(如图1),检查测区内的飞行安全条件,上传航线,自动完成航线飞行与拍摄后返航。若中途电量不够,自动返航更换电池后继续完成后续航线。期间应观察图传实时影像,了解区域状况,发现水保措施,明确需要开展特征照片航拍的区域。

图1 地面站软件导入调查单元边界后自动规划的航线示例
特征照片航拍的目的是对正射影像上难以准确提取或者需要更精细细节的信息进行补充拍摄,主要包括植物与作物种类、工程措施细节等。调查区航测任务完成后即可衔接开展特征照片航拍,在第一视角手动模式下,根据航测时对测区地物和措施的观察,确定拍摄目标,降低飞行高度,调整拍摄角度,近距离拍摄对象照片。
数据处理阶段,首先利用无人机数据处理软件,生成调查区正射影像和实景三维模型数据,将正射影像数据加载到GIS工具软件,用于后续信息提取,三维模型数据用于辅助判断坡面措施类型,如梯田。其次,将拍摄的特征照片导入到GIS工具软件,以照片中的坐标信息生成点状要素,在正射影像上定位照片所在位置,可随时点击查看特征照片。
信息提取阶段有2项任务:一是勾绘调查地块,二是提取调查信息。根据0.1 m分辨率的正射影像,可以很容易的将空间上连续、土地利用类型相同、林(草)地郁闭度/盖度相同、水土保持措施相同的地块划分出来(如图2)。与现场勾绘相比,精确度和效率都有了质的提升,并且可根据影像追溯质量。调查信息的提取包括4个方面:土地利用、生物措施、工程措施和耕作措施。土地利用、生物措施的类型、灌草的盖度、工程措施类型等可以在0.1 m分辨率的正射影像上结合三维实景模型目视解译;林地的郁闭度和盖度、工程措施质量等需要结合特征照片观察后明确;耕作措施在通过特征照片观察作物种类后结合地域特征来判断(表2)。
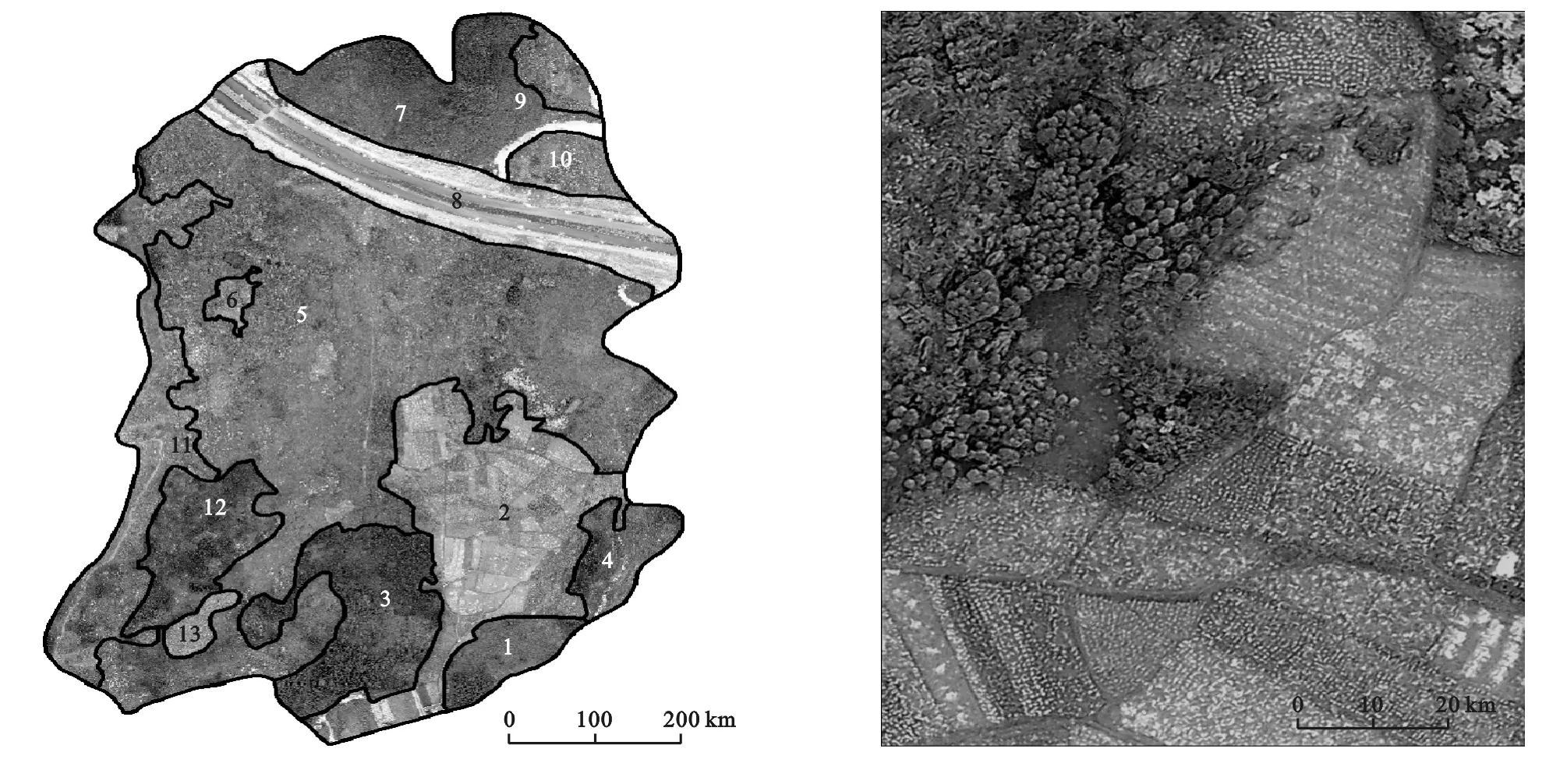
a 基于无人机影像的水蚀调查单元地块勾绘示例 b 无人机影像放大后的细节图
注:地块编号1为灌木林地; 2为旱地; 3为其他林地; 5为其他草地; 8为交通运输用地; 13为水田。
图2基于无人机航测的水蚀野外调查单元地块勾绘示例与影像细部图

表2 水蚀调查单元属性
当使用微型旋翼无人机进行外业调查时,外业调查工作的任务将得到简化,一种典型的工作流程是:外业调查人员将调查单元边界导入地面站软件,依次到达调查单元附近后,操作无人机对调查单元进行航测和特征照片航拍,整理和保存好照片成果。余下的数据处理和信息提取工作由内业人员完成。传统调查与无人机调查流程对比如图3所示。
3 无人机外业调查方法的优势
在无人机水蚀调查单元外业调查的方法中,不再需要制作调查底图、内业清绘和整理录入等工作,简化了工作环节,减少了出错概率,提高了工作效率。外业调查工作简化为航拍,剥离了外业调查中的现场勾绘与信息调查等繁重任务,有效降低了外业工作量,降低了对外业调查人员的要求。此外,由于无人机活动范围广,很大程度上避免了无公路可走,爬山或绕路的时间消耗,更大程度的节省了时间。在全国水土流失动态监测与公告项目实践中,传统方法一天只能调查2~3个调查单元,无人机调查方法一天可以调查4~10个调查单元。

图3 传统调查与无人机调查流程对比
除了效率提升之外,无人机外业调查的一项突出优势是数据质量提升和可追溯。高空视角更容易观察全局,相对于传统现场勾绘的方法,以无人机航拍高分辨率影像为底图的地块划分更加精准,解决了难以准确勾绘地块边界的问题。信息提取也更加准确,并且影像数据可以随时备查,及时修正。由此,在国家或省级层面,更多的内业工作可以集中由专业机构完成,更容易把控质量。
在成本方面,以DJI Phantom3 Advance这款无人机为例,配备6块电池和显示设备后的全套价格不超过万元,在飞行操纵方面足够简单,无需专业培训,上手即会,适合大范围推广应用。
4 结 论
综上所述,现有的微型旋翼无人机产品和摄影测量技术已经可以满足水土流失评价中水蚀外业调查工作的需求。与传统外业调查方法相比,基于无人机的外业调查方法在以下各方面具有明显优势:
(1) 简化了工作流程,完全数字化的工作流程不再需要纸质媒介的中间环节,提高了效率。
(2) 减轻了外业工作量,外业非常耗时的地块勾绘工作被剥离,在室内基于无人机高分辨率影像可以轻松完成。
(3) 延伸了信息采集工具的可到达范围,人不再需要费时的到达调查单元区域内。
(4) 保障了数据质量,解决了现场难以准确勾绘地块边界的问题,调查的信息有影像可追溯,质量可控。由此可见,完善解决了传统调查方法的两大不利因素。
在全国第一次水利普查中,采用分层抽样的方法,在全国范围内布设水蚀野外调查单元,开展了大量细致的外业调查工作,然后利用调查单元内的计算结果,通过空间插值,来评估区域内的水蚀情况,可见外业调查工作对区域水蚀评估的重要性。当时全部依靠人员实地地块调查,工作难度很大。水利部后续每年开展的全国水土保持动态监测与公告项目中,在全国水土流失重点防治区选取抽样县,对其野外调查单元每年度进行更新调查,基于无人机的调查方法得到了应用,体现了其优势,而通过调查方式的改进、成本的降低,将扩展抽样调查在水土流失评价中的应用范围,对于评价方法的进步和评价结果准确性的提升,具有促进作用。
[1] 刘宝元,郭索彦,李智广,等.中国水力侵蚀抽样调查[J].中国水土保持,2013(10):26-34.
[2] 郭索彦,李智广.我国水土保持监测的发展历程和成就[J].中国水土保持科学,2009,7(5):19-24.
[3] 谢云,林燕,张岩.通用土壤流失方程的发展与应用[J].地理科学进展,2003,22(3):279-287.
[4] 李安福,曾政祥,吴晓明.浅析国内倾斜摄影技术的发展[J].测绘与空间地理信息,2014,37(9):57-62.
[5] 曲林,冯洋,支玲美,等.基于无人机倾斜摄影数据的实景三维建模研究[J].测绘与空间地理信息,2015,38(3):38-43.
[6] 王卿,郭增长,李豪,等.多角度倾斜摄影系统三维量测方法研究[J].测绘工程,2014,23(3):10-14.
[7] 王宗辉.航空摄影测量技术的应用研究[J].价值工程,2014(30):235-236.
[8] 李明慈.微型无人机摄影测量数据处理研究[D].北京:北京建筑大学,2015.
[9] Harwin S, Lucieer A, Osborn J. The impact of the calibration method on the accuracy of point clouds derived using unmanned aerial vehicle multi-view stereopsis[J]. Remote Sensing, 2015,7(9):11933-11953.
