基于信息共享的测量引导网的构建方法
2018-03-27,,
, ,
(中国洛阳电子装备试验中心,河南 洛阳 471003)
0 引言
飞行试验中,一般需要多套不同原理、体制、性能的测量装备同时跟踪、测量飞行目标,这些装备的测量方式、测量能力、部署地域存在差异。从测量方式看,有雷达测量、光学测量、卫星测量;从测量精度看,光学、卫星测量能达到厘米级,精测雷达能达到米级,而一些目标指示雷达则只能达到百米级;从测试距离看,光学测量依赖大气能见度,卫星测量取决于基准站的基线长度,雷达测量则能达到几百千米;另外,根据试验的需要,这些装备可能部署在自然环境差异较大的地域。由于上述这些原因,各装备对目标的捕获、跟踪、丢失的时间不尽相同,因此,当一台测量装备未捕获或者丢失目标时,如果有其他装备的数据为其引导,将会大大缩短其捕获目标的时间,从而使各装备为试验提供更多的测试数据。本文考虑通过对多台测量装备组网的方式形成一个有效的测量引导网,实现测量数据实时共享,数据自动驱动装备捕获目标,提高整体测量能力。
1 网络构建思路
引导网由数据采集引导终端、实时处理终端、服务器三块组成。数据采集引导终端和测量装备连接,可以根据入网的测量装备数量设置多个节点;实时处理终端和服务器可以设置在指控场所,便于操控以及为指控系统提供航迹显示数据等信息,网络构建如图1所示。
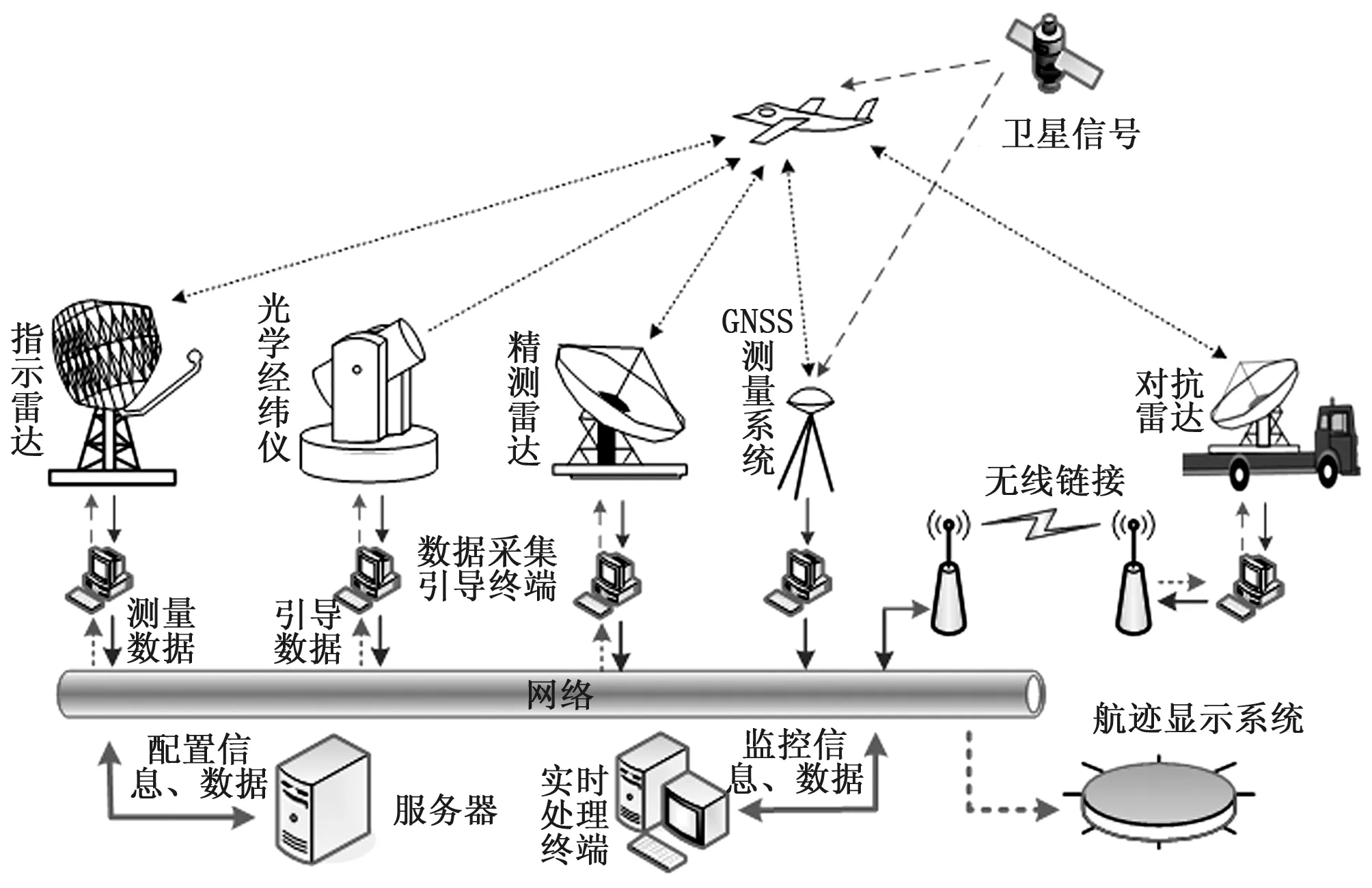
图1 测量引导网构建示意图
数据采集引导终端主要功能是根据实时处理终端的需求接收测量装备采集到的数据并转发到目的终端,同时在本地测量装备没有跟踪上飞行目标时,向实时处理终端发出请求,接收引导数据后将其注入测量装备,驱动天线朝目标方向转动,特别的,GNSS测量系统只需作为引导源的提供者而不需要引导;实时处理终端是引导网络的核心,监控各节点的数据状态,调配数据资源,根据需求生成引导数据,并能够为外围指控系统提供航迹显示数据等服务;服务器主要存储装备坐标点位、相关的配置信息,备份各测量装备的数据。
2 数学模型
对引导源数据进行优化后才能生成引导数据,主要经过平滑剔点、坐标转换、数据融合、数据外推几个步骤,平滑剔点完成对数据源野值点的剔除,提供可靠有效的数据源[1];坐标转换完成不同坐标系下的坐标值的转换;数据融合根据实际要求对同时录取的几批数据进行有效融合,生成更精确的数据;坐标外推是为了解决数据处理和传输过程产生的时间延迟带来的误差,将数据外推到延迟时间之后的一个点,使引导数据更接近飞行目标的真实位置。
2.1 平滑剔点
为讨论方便,所有测量值都统一到大地直角坐标系下,设飞行目标最大速度为v0,可以看成一个常量,设某台装备某时间片的速度变化为:
若vi≤v0,则默认该点正常,可以作为引导数据;若vi>v0则判断(Xi,Yi,Zi)可能是野值点,将其剔除。同时,外推一个拟合点(X,Y,Z)替代,设(Xi,Yi,Zi)前三个连续的点分别为(X0,Y0,Z0,t0)、(X1,Y1,Z1,t1)、(X2,Y2,Z2,t2),这里将三个坐标值看作时间的函数,则根据拉格朗日插值多项式[2-3]可以得到:
同理可以得到Y(t)、Z(t)。对于周期连续的数据,可以令t1-t0=t2-t1=1,若Δt=t-t2,则拟合点的求解可以简化为下列方便编程实践的公式:
这种方法通过判断速度大小来取舍坐标点比较简便,但也比较粗略,尤其是飞行目标起降时的速度要小得多,但是仅作为引导数据而非评估真值,其精度是能够满足要求的。
2.2 坐标转换
具体的坐标转换公式很容易在相关文献上查到,本文仅简单讨论一下转换关系。测量装备常见的坐标系主要有以装备所在点为原点的测站中心坐标系和以地球质心为原点(椭球中心)的地心坐标系两大类。测站中心坐标系常用的有球坐标系(r,e,a)和直角坐标系(x,y,z)两种,地心坐标系常用的有空间大地直角坐标系(X,Y,Z)和大地坐标系(L,B,H)两种。两类四种坐标系的转换关系[4-5]如图2所示。
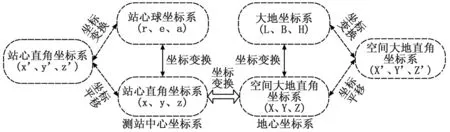
图2 不同坐标系之间转换关系示意图
举例对同类内和不同类之间的坐标转换作一说明,一个点(r,e,a)在以O1、O2为原点的两个球坐标系之间的转换步骤为:
一个以O1为椭球中心的大地坐标点(L,B,H)转换到以O2为原点的球坐标点的转换步骤为:
2.3 数据融合
如果多套测量装备同时有可以作为引导的数据,但这些数据的精度不同,就必须进行数据融合[6]。数据融合收集、处理多个测量设备数据,通过设备之间的性能互补和相互协调,克服单个设备的不确定性和局限性,具有降低虚警率、增大数据覆盖面、提高目标探测识别与跟踪能力、增强系统故障容错与鲁棒性等优点[7]。当引导系统接收多个测量设备数据时,通过数据融合,可以获得更为可靠、更大覆盖范围的融合引导数据。

单台经纬仪测量时只能提供方位角和俯仰角,其测角精度比较高,但不能测距,可以考虑将其他装备的测距转换到经纬仪的测量坐标系内,就能得到更优的坐标值。设某测量装备的测距为D0,其位置点在经纬仪测量坐标系下的距离、方位、俯仰值分别为D*、β*、ε*,经纬仪测得的方位、俯仰值为α1、λ1,则D0转换到经纬仪测量坐标系下的距离D1可通过如下公式[10]算出:
Q1=cos-1(cosε*cosλ1cos(α1-β*)+sinε*sinλ1)
于是就得到一个融合优化点(D0,α1,λ1),即可作为引导数据。需要指出的是,求解角度Q2时,已经假定Q2是锐角,否则会出错,当然,如果经纬仪和提供距离的测量装备相距不是太远,飞行目标就不可能飞行到以两者为直径的球体内,也就不会出现上述情况。
2.4 数据外推
引导数据经过各种换算并传到被引导装备点位时,因为延时的影响导致引导数据的误差增大,可以考虑通过数据外推来弥补。试验中,各测量装备都是通过卫星时间进行同步[11],如图3所示,设引导源装备A在t1时刻测得目标数据,数据经过一系列变换处理后,t2时刻传输到被引导装备B的计算机,此时可以先将引导数据外推延迟时间(t2-t1)后再注入被引导装备驱动天线。外推模型可以采用本文3.1所述的拉格朗日插值方法[12]。
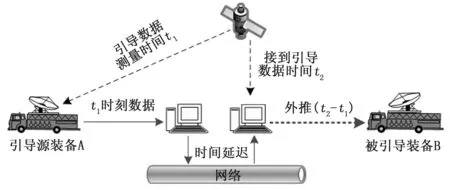
图3 引导数据时间延迟示意图
3 软件架构
软件系统开发平台采用Visual Studio 2010和SQL Server 2008,开发语言为C#。软件系统是整个试验引导平台的核心,是所有数据接收、处理、发送、存储的中心。软件系统根据硬件系统的架构形式也对应地设计为三个部分:数据采集引导终端分系统、实时处理终端分系统、数据库分系统,三者之间的数据处理、信息交互如图4所示。
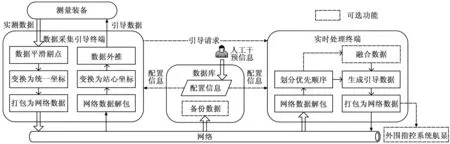
图4 引导网数据处理、信息交互示意图
3.1 数据采集引导终端分系统
整套系统有多个数据采集引导终端,与装备直连,主要功能可以概括为两个方面,一是采集装备数据并向实时处理终端发送,作为生成其他装备引导数据的数据源;二是向实时处理终端发送引导请求,接收引导数据,处理后注入装备天线伺服系统。作为数据源采集时,其基本流程是:①接收装备原始数据;②剔除数据中的野值点;③将数据转换为大地直角坐标,为数据处理方便,把网络传输的数据统一为大地直角坐标,特别的,因单台光学经纬仪测得的数据只有方位角和俯仰角,可以先请求实时处理终端转发其他装备数据过来,数据融合优化后再进行坐标转换;④将数据打包并发送至实时处理终端和服务器。作为接收引导数据时,其基本流程是:①提取实时处理终端发来的数据;②将大地直角坐标转换为装备的站心坐标;③计算延迟时间,并外推;④打包成网络传输的数据格式,发送至装备数据接口。网络传输的数据包格式可以简要定义为表1形式。

表1 网络传输数据包格式
数据采集引导终端分系统主要功能模块如图5所示。
3.2 实时处理终端分系统
整套系统只有一个实时处理终端,处于核心地位,所有信息都要经过它处理、授权,所有资源都由它调度、分配。可以
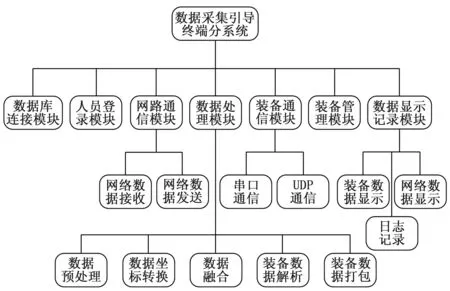
图5 数据采集引导终端分系统功能模块结构图
对其附加很多功能,最基本的应包括:①管理数据库,如系统初始化,数据的存储与否,等;②监控测量装备的状态,如是否有数据、是否需要引导、是否丢失数据、是否终止引导,等;③调度分配资源,如根据装备的测量精度等级划分引导源的优先顺序、根据需求融合多批数据、生成引导数据等。
这些功能里面最为关键的是引导数据的生成,系统运行时,实时处理终端一方面扫描数据源情况,生成引导数据;另一方面扫描引导请求情况,向发出引导请求的装备发送引导数据或等待消息。实时处理终端分系统主要由六大模块组成:人员登录、网络通信、数据处理、数据显示、数据库管理和系统控制模块,各个模块又分为多个子模块,实现各具体功能,如图6所示。
3.2.1 人员登录模块
该模块主要实现操作人员登录系统的功能。系统为每一名操作人员设置了权限,为了系统的安全,操作人员必须输入正确的用户名和密码才能登录和使用系统的相关功能。
3.2.2 网络通信模块
该模块主要是实现利用平台网络传输测量数据的功能,其主要分为两个子模块:网络数据接收和网络数据发送。数据在平台网络中的传输方式主要是UDP传输,利用Socket编程实现UDP接收和发送数据的功能,主要由UDPSendRev类实现。数据接收的功能利用函数SendingMsg()实现,数据接收的功能利用函数ReceivingMsg()实现。
“小表姐正生气二表哥偷懒,却听见柴垛的后面有响动,然后,居然听到了女人的喘息声。小表姐的脸色变得难看起来,已经是大姑娘的她,知道那是什么声音,于是奔到柴垛后面一看,呆住了。
3.2.3 数据处理模块
该模块主要是实现数据处理系统的相关功能,包括数据预处理、坐标转换和数据融合。该功能主要是利用DataPoint类来实现,在DataPoint类中编写了实现各功能的相关函数,如表2所示。
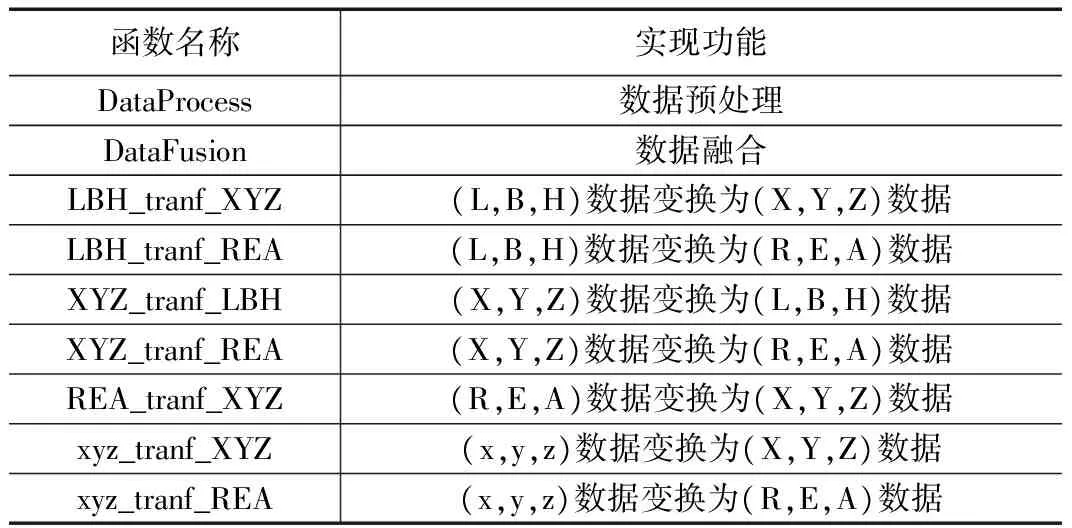
表2 数据处理模块功能实现函数
3.2.4 数据显示模块
该模块主要是实现实时测量数据的显示和飞行目标航迹的二维实时显示。当系统接收到新的测量数据时,在DataGridView控件中插入新的一行并显示新的接收数据,显示的内容包括数据录取时间、数据来源、试验代号、目标批次号、大地直角坐标数据、经纬度数据、球坐标数据等。航迹显示主要是利用ZedGraph.dll来实现。
3.2.5 数据库管理模块
该模块主要是实现对数据库的管理,包括数据插入、数据修改、数据删除、数据存储、数据库备份和恢复等。系统连接上数据库后,利用DataSet和DataAdapter将数据库所有表的内容显示在DataGridView中。通过对DataGridView操作实现对数据库表数据的插入、修改和保存等功能。
3.2.6 系统控制模块
该模块主要实现对数据采集引导终端分系统的控制和系统操作日志记录的功能。数据采集引导终端分系统是安装在各装备的PC端上,由于装备的位置比较分散,难以集中管控,给试验引导平台的维护、管理带来了困难,也存在着一定的安全隐患。因此为了消除这些困难和隐患,需要在实时处理终端分系统上实现控制功能,使其能够在一定程度上控制数据采集引导终端分系统,保证整个试验引导平台安全、有序的进行。控制方式主要是发送指令,即实时处理终端分系统可以向网络链路中的数据采集引导终端分系统发送控制指令,数据采集引导终端分系统接收到指令后根据预定义规则执行相关操作。同时,实时处理终端分系统也可以向数据采集引导终端分系统发送相关信息,以便于双方操作人员的交流。消息包格式如表3所示。

表3 实时处理终端分系统发送消息包格式
其中,同步码为消息包的包头,表示这是消息包。
类型分为两种:控制指令(Control)、信息(Message)。
IP地址为消息发送目的地的网络地址。
消息代码为预定义的控制指令代码,接收端读取消息代码,根据预定义内容执行相关操作。
消息内容主要针对发送的Message内容,显示相关信息。
说明不是必选项,是对当前消息的情况介绍。
校验码是对消息包完整情况的检查,是对消息包的检验。
实时处理终端分系统还具有记录操作日志的功能。系统会把所有操作的记录、系统内部运行的情况等都显示在界面上,并备份到本地日志文件中,以便于操作人员实时了解系统的运行状况,及时发现问题和解决问题,避免异常情况的发生。
3.2.7 系统流程
实时处理终端分系统系统流程图如图7所示。
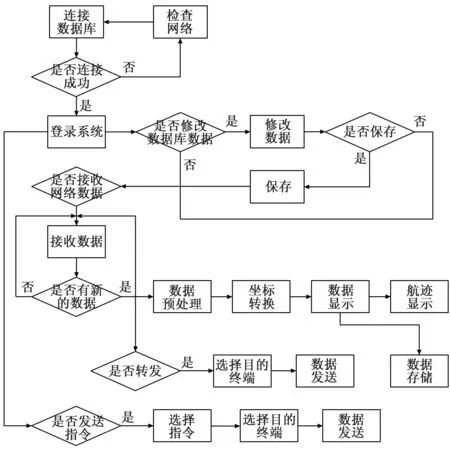
图7 实时处理终端分系统系统流程图
3.3 数据库分系统
服务器主要作用是集中管理所有信息,概括为两个方面:一是提供人工控制窗口,存储各种配置信息,例如装备的代号、所在点位坐标、IP地址、数据优先等级、权值等信息,系统开始运行时,各终端主机自动读取服务器中的配置信息;二是备份各测量装备的数据。将配置信息的设置权限集中于服务器,可以避免因其他终端的操作人员无意中更改配置信息产生数据解读错误,增强系统运行的安全性和准确性,本项目数据库系统共包含有五个表,如图8示。

图8 数据库分系统表结构
4 测试结果
测试时,采用GPS定位信息作为引导源,当接收到引导
数据时,被引导装备能够快速捕获并跟踪到飞行目标,从GPS发送引导数据到装备跟踪到目标时间统计如表4所示,各装备在未使用引导平台情况下,在原有引导模式下各装备跟踪到目标的平均用时如表5所示。
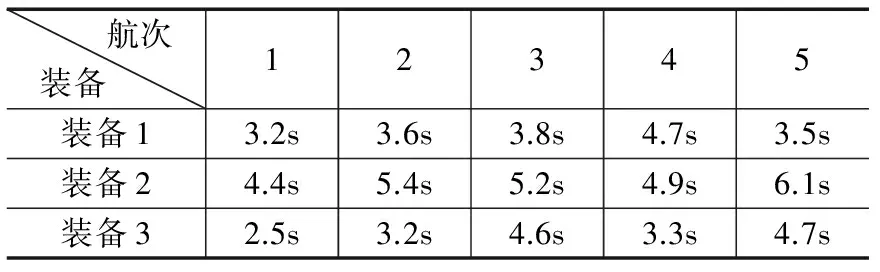
表4 GPS为引导源时各装备跟踪到目标时间统计表

表5 原引导模式下各装备跟踪到目标平均用时统计表
通过测试可以得出,试验引导平台作为所有参加装备测量数据交互和共享的平台,它能够及时的实现任意两台装备之间测量数据的实时传输,使得任意一台装备都能够为其它所有装备提供引导服务,极大的缩短了装备发现目标、跟踪目标和测量目标飞行数据的时间,降低了装备录取数据的丢包率,为事后数据处理提供了更加真实、可靠的飞行数据。
5 结束语
本文针对飞行试验中不同原理、不同体制、不同性能、不同布站环境的多套参试装备同时跟踪测量飞行目标而导致的捕获、跟踪、丢失目标时间长短不一的问题,设计了一种基于信息共享的网络引导平台,运用数学方法对引导源数据进行优化,使得网络中的每一个节点可以快速得到其他装备的最优引导数据,以最短的时间捕获跟踪上飞行目标,从而提高装备的整体测量能力和使用效率。
[1] 马姓.基于UKF的自适应野值剔除算法[J].计算机测量与控制,2016,24(8):40.
[2] 魏毅强,张建国,张洪斌,等.数值计算方法[M].北京:科学出版社, 2017.
[3] 吴赛飞,王新华,贾 森,等.基于红外视觉的固定翼无人机自动着陆引导系统[J].电子测量技术,2016,39(3):131-135.
[4] 朱华统. 常用大地坐标系及其变换[M]. 北京:解放军出版社, 1990.
[5] 熊 介. 椭球大地测量学[M]. 北京:解放军出版社, 1988.
[6] 董文永,刘 进,丁建利,等. 最优化技术与数学建模[M].北京:清华大学出版社, 2010.
[7] 桂 阳.基于异构传感器的弹道导弹主动段融合跟踪[J].电子测量技术,2016,39(3):110-113.
[8] 黄朝美,杨马英.基于信息融合的移动机器人目标识别与定位[J].计算机测量与控制,2016,24(11):
[9] 陈庆良,高 山,姬新阳. 飞行目标航迹显示中的数据拟合方法[J]. 舰船电子工程, 2016(12):55-57.
[10] 毛洋方,逸 远,周敬烈.基于混合模型的炮位外推算法研究[J].电子测量技术,2015,38(12):36-40.
[11] 包国忱. 电子装备试验数据处理[M]. 北京:国防工业出版社, 2002.
[12] 黄丁发,张 勤,张小红,等.卫星导航定位原理[M].武汉:武汉大学业出版,2015.
