多目标试验机试飞态势监视系统的设计与实现
2018-03-27,,
, ,
(中国飞行试验研究院,西安 710089)
0 引言
在飞行试验中,当遥测目标丢失后,遥测人员需要重新搜索目标。如果仅凭个人工作经验,则存在时间长、难度大等缺点,这对飞行试验构成了严重的安全隐患。如果,遥测人员能够实时掌握试验机的状态和形势的态势信息,则能够快速、准确的重新定位到测试目标。所以,对试验机的态势监视是保障遥测信号稳定的重要方法。电子地图是目前态势监视的主要工具。
电子地图是传统地图与计算机技术、GIS(地理信息系统 Geographic Information System)技术、网络技术相融合的产物,以数字图形的方式来描述试验对象的地理信息,如GPS(全球定位系统 Global Positioning System)位置、高度等。随着GPS技术的成熟,电子地图得到了广泛的应用。机载采集设备实时获取飞机的GPS经度、纬度、高度、速度等信息,并通过机载遥测天线实时发送至地面接收设备,最终采用网络化技术及时显示在电子地图上,可以帮助地面监控任务直观地掌握试验机的的飞行状态,有效防止偏航、迷航,为试飞安全提供了重要的保障。MapX是MapInfo公司向用户提供的具有强大地图分析功能的ActiveX控件产品。在开发过程中可以选用自己最熟悉的开发语言,如VC++、VB、Delphi、PowerBuilder等语言,只需在设计阶段将MapX控件放入窗体中,并对其进行编程,设置属性或调用方法或相应事件,即可实现数据可视化,专题分析,地理查询,地理编码等丰富的地图信息系统功能。利用MapX能够简单快速地在应用中嵌入地图功能。
目前,态势监视软件主要是单目标电子地图,该软件在保障试验机试飞安全起到了积极的作用。但结合当前遥测专业实际情况,如果使用该软件辅助遥测跟踪,则存在一下几个问题:①每天飞行架次较多,并且多架同时试飞,如果要掌握所有飞机的态势信息,则需要在单目标电子地图上进行频繁的切换,如果一架试验机的PCM中断后再去切换,也就没有态势信息了。②由于部分飞机机动型太强,仅靠PCM中断前的态势信息,也不一定能及时重新锁定目标。③天线方向对遥测信号质量影响较大,如果能准确计算天线相对飞机的角度,则能够及时准确的锁定目标。综合以上三点,单目标电子地图不适合目前遥测监控的实际情况。
本文通过对实时遥测系统的结构和原理进行了研究,设计并开发了具有多目标监视功能的试验机试飞态势监控系统。为了满足目前飞行试验的实际需求,系统有一下特点:①多目标的监视模式,系统能同时监视所有遥测试验机的试飞态势。②通过引入二次雷达数据,解决了部分飞机PCM中断后不能及时重新锁定的问题。③计算飞机相对遥测天线的水平和垂直角度,实现对遥测天线的精确性指引。
1 系统设计
1.1 总体设计
在飞行试验中,通常在飞机上加装遥测天线用来发射无线遥测PCM(pulse code modulation)信号。地面遥测接收机接收无线遥测PCM信号并将其解调后送往实时处理服务器,服务器经过处理送往试飞监控客户端,从而实现飞行试验的实时监控。因此飞行试验实时遥测系统通常可分为机载数据发送、地面遥测接收、前端实时处理和视图驱动显示客户端显示四部分[1],如图1所示。

图1 总体设计原理图
通过对飞行试验实时遥测系统的研究,系统采用服务器/客户端的网络模式。服务器通过获取飞机的关键参数信息,并通过网络发送到系统客户端。客户端对接收的信息进行计算并根据需要进行显示。
为了提高设备利用率,减少重复工作,在现有的实时处理服务器软件的基础上,通过增加相关模块,实现系统服务器所需功能。即在前端实时处理服务器软件增加关键参数发送功能,对不能增加发送功能的可通过视图驱动客户端以及关键参数转发软件转发。
为及时准确锁定遥测目标,提高系统的可靠性。系统除了接收PCM数据外,还接收并解析飞机的二次雷达数据,并将相应的关键参数发送到试飞态势监视系统客户端。
二次雷达SSR(secordary surveillance radar),起初主要用于军事监测和打击,其工作模式是地面雷达向目标飞机发射雷达波,目标飞机以相应的方式应答。随着民用航空的发展,二次雷达被广泛的应用在航空飞行管控中。由于二次雷达探测距离一般在3 000~3 700公里,远高于遥测天线300公里的跟踪距离,因此能够有效的保证试验机态势信息的及时获取。
总体来说,本系统由前端实时处理服务器、视图驱动客户端、关键参数转发软件、二次雷达数据解析软件以及试飞态势监视系统客户端组成,即图1虚线框内部分。
1.2 功能设计
1)服务器端。
服务器端主要功能从遥测接收机获取飞行基本数据并发送到客户端。获取二次雷达数据的处理软件也可认为是一种服务器。根据目前我院数据处理服务器的不同相应的可以分为3种:①服务器发送关键参数;②服务器无法直接发送的,可由关键参数转发软件从视图驱动客户端获取数据并转发;③二次雷达数据解析软件,通过接收二次雷达数据,并实现关键参数的发送。
2)客户端。
客户端是最终展示在使用者面前,客户端可以是多目标画面或者地图等等。总之,客户端就是将服务器发出的态势信息以数字或者图表的方式展示给用户,可以是各种不同的软件。
为了直观的显示试验机的试飞态势,本系统的客户端使用基于多目标的飞行试验电子地图软件。软件采用MapX组件与面向对象可视化编程语言VC++集成的二次开发模式,具有电子地图所必备的基本功能;同时该软件还具有可扩展性,根据多目标飞行监控特点,增加了飞机轨迹选择、飞机中心点、飞机选择和绘制飞行半径等实用功能[2]。软件功能模块如图2所示。

图2 客户端功能设计
软件的主要功能模块包括设置、操作以及显示三部分。
设置部分包含基本设置、航路点管理、遥测站选择等功能,其中基本设置中应该包含数据源的选择,即选择接收PCM数据还是二次雷达数据,或者PCM数据和二次雷达的混合数据。航路点管理包括航路点的新建、导入、删除、修改、选择、加载以及绘制等操作,实现了飞行的导航功能。遥测站选择主要是为遥测人员提供服务,通过选择当前跟踪试验机的遥测天线,软件就可以计算出该试验机相对该遥测站的水平和垂直方位角,并将该信息实时显示在地图,极大的方便遥测人员的工作,对遥测信号的稳定起到了积极作用。
操作部分包含飞机隐藏、地图基本操作、距离测定、飞机中心点以及绘制飞行半径等功能。其中地图操作包含放大、缩小、居中、漫游、平移、点选图元等基本功能。此外,针对实时飞行特点,提供了测距、飞机中心点、绘制飞行半径、飞机隐藏、轨迹选择等功能。其中飞机隐藏功能只要是屏蔽一些不关注的飞机信息,使试飞工程师能够很好的将注意了集中在所关注的试验机。轨迹选择功能提供两种轨迹显示方式,所有轨迹显示和部分轨迹显示,方便使用者查看飞机整个飞行过程的历史态势。
显示部分包含飞行轨迹显示和飞行信息显示功能。飞行轨迹显示功能显示飞机位置、轨迹以及遥测天线角度;飞行信息显示功能是将所有飞机的基本参数通过列表的方式显示在地图下方,方便遥测人员及时了解到其他相关信息,如航向、俯仰、横滚、油量等影响试飞安全的关键参数。软件采用灵活配置方式,用户可通过相关设置,配置自己关心的参数。
1.3 接口设计
为实现多目标的监视模式,系统采用UDP组播发送和接收。根据实际需要,数据包应该包含以下信息:①同步字和总字长,保证数据接收正确;②飞机号,每架飞机的唯一区分;③处理系统类型,不同的服务器类型,有些参数的解析也不一样;④数据类型,1表示实时,0表示回放;⑤时间字,包括时分秒以及毫秒;⑥基本信息,经纬度、高度、速度、航向角、横滚角、俯仰角和剩余油量等。格式如下所示:
typedef struct plane
{
unsigned short tb; //同步字
unsigned short zc; //总字长
unsigned short number; //飞机编号
unsigned short System_Type; //处理系统类型
unsigned short Date_Type; //数据类型 1--实时,2--回放
float Info[12]; //时间位置状态信息
}airplane;
2 关键技术及实现
客户端软件是系统的重中之中,客户端的好坏直接影响用户对系统的体验,所以本文主要介绍客户端软件的实现方法,即多目标电子地图的实现。
2.1 多流数据的接收方法
为确保数据及时接收,采用线程实现。如图3所示,开启网络Socket后,软件从缓冲区读取一帧数据,然后经过以下几个步骤:①检查数据是否正确,判断数据同步字是否正确,若同步字正确,则数据有效,否则丢弃该数据;②读取飞机号。软件为每架飞机创建一个结构体变量,该变量保存接收到的飞行数据;③判断飞机是否存在,若已经创建该飞机的结构体变量,则更新该变量的数据,否则创建结构体变量保;④送入定时器显示,最终在定时器中进行信息的显示和操作。

图3 数据接收流程图
2.2 关键参数的计算方法
要辅助引导天线就要计算飞机相对天线的水平和垂直角度。本文通过对实际飞行情况的分析,得出相关角度的计算方法如下:
1)水平角度。
假如飞机在第一象限的水平投影如图4所示,则β即是水平角度,其计算公式如下:
β=sin-1(Dy/Dxy)*180/3.14(度)

图4 飞机水平方向投影
投影若在其他象限,可通过加减90°的倍数实现。
2)垂直角度。
假如飞机在垂直方向上的投影如图5所示,则天线垂直投影角度为α,其计算公式如下:
β=sin-1[(Dxy/(Hp-Hy)]*180/3.14

图5 飞机垂直方向投影
2.3 实时显示技术
实时显示主要显示飞机位置、基本飞行参数和飞行轨迹。保证数据的及时准确和界面的整洁友好是实时显示技术的重要指标。软件实时显示流程图如图6所示,主要用到以下技术保证系统的各个性能[3-7]:

图6 实时显示模块处理框图
1)利用MapX的动态图层,保证了数据刷新的及时性。显示飞机定位信息的图元所在图层可以是一个已有的图层,与其他图元共同存在,但是这样在每一次刷新时将要刷新该层中所有的图元,刷新速度比较慢。因此,采用创建动态图层的方式来予以解决。动态图层(AnimationLayer)常用于经常更新的图元所在的图层,将表示飞机的符号图元、标签和飞行轨迹置于单独的一个图层中,来快速刷新显示飞机定位信息。
2)剔除跳点,保证数据的正确性。采用多种方法实现:a)判断数据的合法性;b)通过相关的计算判断数据的合理性,如相邻两点之间距离过大,超过理论上飞机所能达到的最大速度,则可认为该数据点为跳点;c)采用常见的均方根值法判断跳点。
3)轨迹的动态变化,保证界面的整洁性。多架飞机同时飞行,如果显示每架飞机的完全轨迹则会显得地图太乱,系统通过创建动态数组,将飞行轨迹保持在一定范围内,从而保证界面的整洁性。
3 应用实例
目前系统已经在各个遥测站以及监控大厅中使用,对保障重点型号的试飞起到了重要的作用。系统主要软件包括PCM数据发送软件、二次雷达数据解析发送软件和多目标电子地图软件。
3.1 服务器端软件
图7为PCM飞参数据发送软件的参数配置界面,通过配置飞机关键参数名来提取参数物理量,并通过网络组播方式发送至多目标电子地图。该软件即可独立运行,也可嵌入到其他大型软件中,作为一个功能使用。本系统就采用在前端实时处理软件嵌入PCM飞参数据转发功能模块实现了PCM数据到电子地图的传输。
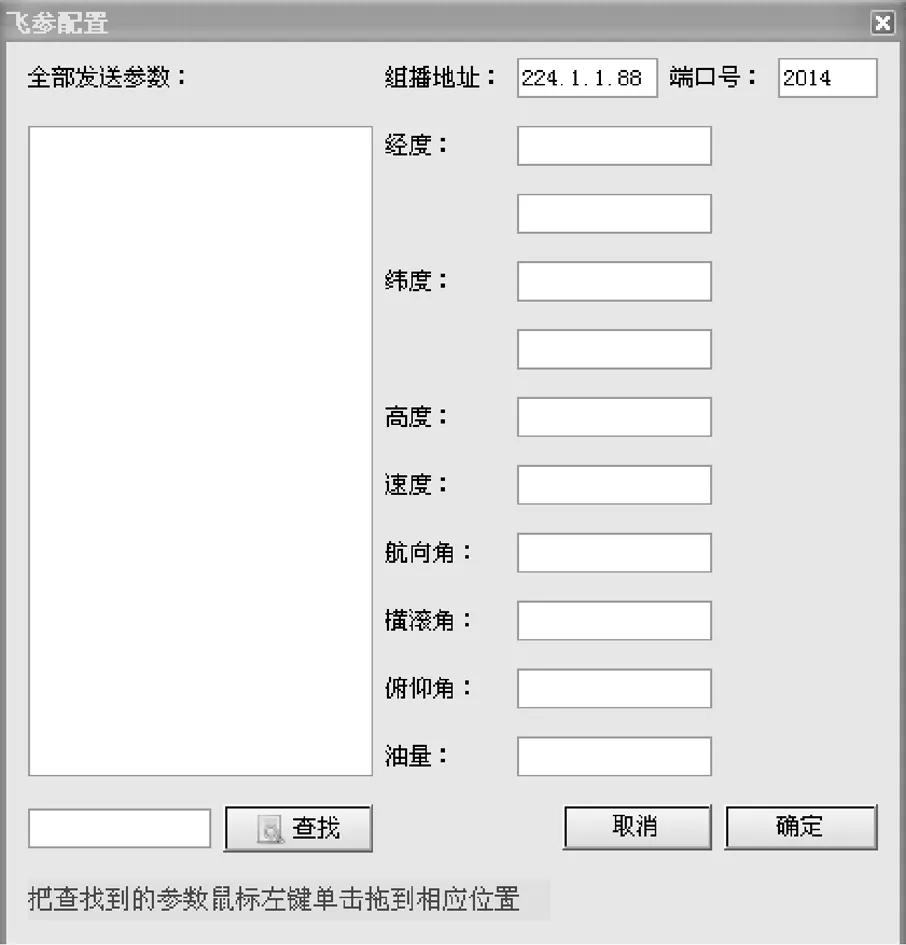
图7 PCM数据发送软件
3.2 客户端软件

图8 多目标电子地图
图8为多目标电子地图软件,上部分电子地图显示飞机的位置信息,下部分列表显示飞机部分关键参数信息。在显示信息最右边选择遥测站后,会显示飞机相对该遥测站的水平和垂直角度。图中以机场为中心显示坐标轴,以每隔100公里绘制飞行半径。如图8所示,地图同时显示四架飞机,其中飞机1显示了完整轨迹,并用虚线画出,其余三架仅显示最近两分钟内的轨迹。用户可通过菜单栏的“设置”功能编辑地图基本信息以及选择数据源的类型。当PCM数据中断时,用户可通过可在此项设置中切换数据源为二次雷达类型,从而快速搜索到当前跟踪目标。使用表明,使用该软件后,将丢失目标的搜索时间由原来的3~5分钟缩短至20~30秒,大大提高了跟踪效率。
4 结论
系统采用面向对象程序设计语言VC++,集成MapX控件,并结合单位型号试飞特点,设计并实现的多目标试验机试飞态势监视系统的开发。经实际使用表明,软件简单易用,完全满足多目标监视的需求,由于引入了二次雷达数据以及计算了遥测天线角度,解决了当前飞行试验中测试跟踪目标丢失后的重新搜索和跟踪问题,缩短了目标锁定时间,提升了遥测信号的质量,为试飞安全提供了保障。
[1]于 艳,等, 分布式网络遥测数据处理系统软件设计[J].测控技术,2006(6):62-64.
[2]刘升护,王 鹏,叶 冰.多目标电子地图的设计与实现 [J].现代电子技术,2015,38(12) : 94-97.
[3] 秦 浩,徐景硕,高 扬,等.基于VC++与MapX的导航电子地图的实现[J].航空计算技术,2011,41(5) : 98-101.
[4] MapInfo Corporation. MapX 5.0开发人员手册[Z].2004.
[5] 颜辉武.VC++环境下基于MapX 控件的GIS 应用软件的开发[J].昆明理工大学学报:理工版,2001(6):12-17.
[6] 王 庆,周喜宁,宋 磊.基于 MapX 的模拟器电子海图软件设计研究[J].现代电子技术, 2014, 37 (1): 119-122.
[7] 王延路,刘语乔.试飞监控电子地图设计与实现[J].现代电子技术, 2013,35(13): 131-133.
