某型机载高度表指示器数字化显示电路设计
2018-03-27,,,
,,,
(海军航空工程学院 青岛校区航空电子系,山东 青岛 266041)
0 引言
高度表是军机上重要的机载电子设备,它用来测量高度数据并通过显示器将高度显示出来供飞行员或空勤人员查看。高度是飞行中关注的重要飞行参数,高度表的测高的精确性与显示实时性直接影响着飞行安全,这是一个不容忽视的问题。目前某些型号高度表指示器采用的磁电指针式指示器,这种磁电指针式显示器存在着读取精度不高、抗震性差、非线性程度不好、数据不易存储等缺点。如果对高度表的模拟高度电压信号进行数字化显示,将有利于提高读数精度,同时还能将高度数据分配给其他系统使用,提高机载电子设备综合性能。本文采用以单片机系统为主体的设计方案,通过接口电路功能扩展,设计了一种高度表数字化显示电路,完成对模拟高度电压信号的A/D转换、非线性修正及数码显示。
1 模拟高度电压信号分析
一般高度表采用频率法测距,高度表发射电路产生的调频信号,一路直接输到接收电路,另一路向地面发射,从地面反射回来后到达接收电路。由于调频信号的频率总是不断变化的,所以直接信号和接收信号之间产生了频差。差频信号代表电波往返时间长短,从而反映了飞行高低。高度表计算电路把差频信号转换成大小与飞行高度成正比的直流电压信号,然后把直流电压加至有关电路,变成与高度成正比的直流电流,最后流经高度指示电路将高度指示出来。
如图1所示,高度直流电压与差频脉冲是一对非线性变化关系,磁电指针式高度表要将该非线性电压信号显示出来,需在指示表盘上采用非均匀的指示刻度,一般在低高度范围标注的刻度密,而在高高度范围标注的刻度稀,以此来修正该非线性变化的信号。本设计电路在对该高度信号进行数字化显示时,也需对该信号进行非线性修正处理。因为该曲线上每个点电压所对应的高度值是一定的,所以可以在允许误差范围内对它进行采样,然后根据电压和高度数据编写查表程序,过查表查得每个输入电压所代表的高度数据,这样就可以修正非线性变化的电压。

图1 高度直流电压信号与差频关系曲线
2 总体方案设计
由于输入高度表指示器的电压为非线性变化的模拟电压,如果要将该电压进行数字化显示,需要经过高度电压的模数转换、非线性修正、数字化显示等步骤。非线性修正及数字化转换,可采用逻辑电路器件,也可以使用单片机系统或数字电路[1-3]。由于逻辑电路设计比较复杂、使用灵活性差、转换精度不好,而单片机电路设计电路简单、灵活性强、转换精度高、芯片价格低[4-5],所以选用以单片机系统为主体的设计方案,通过接口电路与软件编程,实现对模拟高度电压信号的A/D转换、非线性修正、LED数码显示等综合功能。
模拟电压进行A/D转换使用8位ADC0809型集成芯片,可满足高度表显示量程和精度误差的要求。非线性修正选用在单片机内部嵌入查表程序的修正方案。数字化显示部分选用LED数码显示,因为LED数码显示接口电路简单、与单片机的兼容性好、读取方便、显示位数可控。查表程序查得的各位高度显示数据加到与单片机相连的LED段译码器和位译码器上,把显示高度数据转换成段选码和位选码,然后输出到LED数码显示器上显示出来。
采用上述设计方案优点为:电路整体性好、兼容性高、适用范围广、可扩展功能性强、电路设计费用低。无论什么样的模拟高度信号,都能用本电路对其数字化显示,而且显示精度可控,高度数据易存储,可以为其它作战处理平台提供数字化的高度参数。
总体电路设计原理框图如图2所示,主要功能模块有:单片机系统、A/D转换部分、非线性修正部分、数码显示部分。

图2 设计电路原理框图
3 硬件电路设计
3.1 高度电压非线性修正
非线性修正有很多方法,如数学函数量化、小间隔线性处理、标准线型匹配、查表程序法等。前4种方法计算过程较为复杂,修正数据使用范围窄,数学处理较为困难,与选用的单片机系统的兼容性不好。为了提高非线性修正精度和电路兼容性,本文选用查表程序法非线性修正方案,对输入不同的模拟高度电压信号,使用不同的量化方案和查表程序。即首先对模拟电压进行采样,采样后的模拟电压会得到一个高度数据,然后根据该采样数据编写查表程序表格存入单片机内。这样通过查表查得每个模拟电压对应的显示高度数据,从而达到了非线性修正的目的。
表1为高度表量程为设置为1 200米,显示精度为设置4.7米时的非线性修正查表表格。表格存储的是查表地址所对应的高度数据,每个高度数据由千位、百位、十位、个位、小数位五位组成,要显示一个高度数据需要进行5次循环查表,然后将查得的每位数据送去进行LED数码显示。要显示的每个数据由位选码和段选码组成,比如千位要显示数字‘1’,则1对应的中P1.0~P1.3(图3)低四位脚输出的位选码BCD码是01H,1对应的P1.4~P1.7(图3)高四位输出的位选码是08H,即在P0.0~P0.7(图3)脚置数81H,则在千位显示出1来。
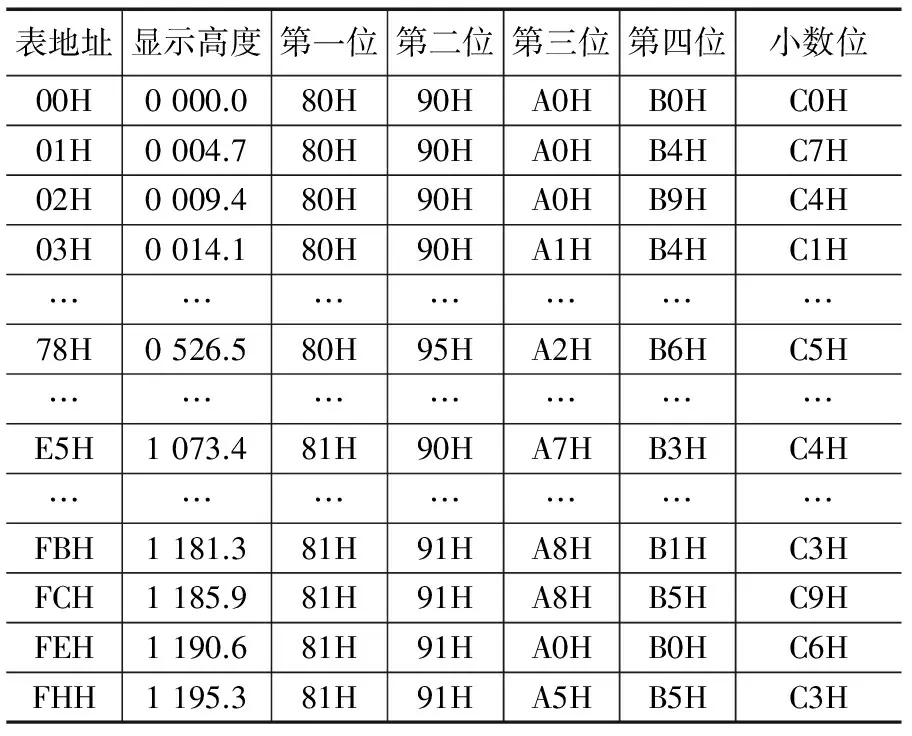
表1 非线性修正查表表格

图3 总体电路及接口设计
3.2 A/D转换模块设计
A/D转换芯片选用常用8位ADC0809芯片,可以对模拟高度电压进行256份的采样量化,对某型高度表低范围,可以达到0.47米(120/256=0.47)的显示精度,高范围可以达到4.7米(1 200/256=4.7)的显示精度。A/D转换模块主要组成部件有:ADC0809模数转换器、74LS74触发器、74LS373地址锁存器、74LS02或非门。74LS373地址锁存器用来锁存ADC0809的模拟转换通道。74LS74 D触发器用于把单片机ALE端输出的频率为1 MHz的时钟信号二分频,给ADC0809芯片提供频率为500 kHz的时钟信号。74LS02用在完成对ADC0809的启动转换控制、数据输出允许控制。
3.3 数字化显示设计
考虑到LED数码管具有功耗小、耐冲击、寿命高等优点[6],数字化显示模块采样LED数码显示方式。主要组成部件有:7段LED数码显示器、MC14558段译码器、74LS138译码器、ULN2003A段(位)驱动器,如图5所示。LED数码显示采用5位共阴极动态扫描显示方式,在某时刻输入某一位的段选码和位选码,然后每位依次循环显示下去。MC14558BCD段译码器用于LED数码显示的段译码,74LS138译码器用于LED数码显示的位译码。UIN2003A段(位)驱动器驱动常规的LED数码显示器,把段(位)译码器输出信号的电流,变成LED数码显示所允许的电流。

图4 ADC0809、74LS373、74LS02、74LS74芯片

图5 MC14558、74LS138、UIN2003A芯片
3.4 单片机与附属电路设计
3.4.1 主处理芯片
单片机系统主处理芯片选用MCS-51系列8 751单片机,8 751单片机内部带有4 KB存储空间,可通过接口功能电路控制其他部分,实现对输入模拟高度电压的A/D转换、非线性修正、LED数码显示等综合功能。单片机各管脚在本电路所实现的功能如下。
VCC脚接外部+5 V电源,VSS脚接地;RESET脚接外部复位电路,当按下复位开关单片机处于起始状态准备工作;XTAL1,XTAL2外部时钟信号输入端,为单片机提供6 MHz的时钟信号;ALE脚接地址锁存器使能端,控制地址锁存器,同时ALE输出信号经过二分频后还给A/D转换器提供时钟信号;P0.0~P0.7脚为地址数据线复用引脚,当地址锁器锁存地址线时,输出地址选通数据,选择A/D转换器的模拟转换通道IN0-IN7的哪一路。A/D转换后的数据,由P0.0~P0.7作为数据线输入单片机内;P2.7、P3.6、P3.7脚输出的信号经或非门芯片后,共同完成对ADC0809的启动控制、数据输出允许控制;P1.0~P1.3脚用于输出LED数码显示的段选信号,控制LED数码的显示的字符形,P1.4~P1.6脚用于输出LED数码显示的位选信号,经过3~8译码后控制LED数码管的哪位点亮,P1.7脚输出高电平到S1脚,启动译码工作状态;脚接高电平,允许执行个功能时访问片内的程序;P3.1输出高电平到LED数码管的第四位小数位dp脚,点亮该小数点。

图6 8 751单片机芯片
3.4.2 附属电路设计
附属电路主要有复位电路、振荡电路、电源电路组成,图7~9所示。复位电路用于电路启动时系统的初始化。振荡电路采用石英晶体振荡电路,为单片机提供的时钟频率为6 MHZ的时钟信号。电源电路提供+5 V直流电源供电,具有稳压、平滑滤波,拟制高、低频干扰等功能。
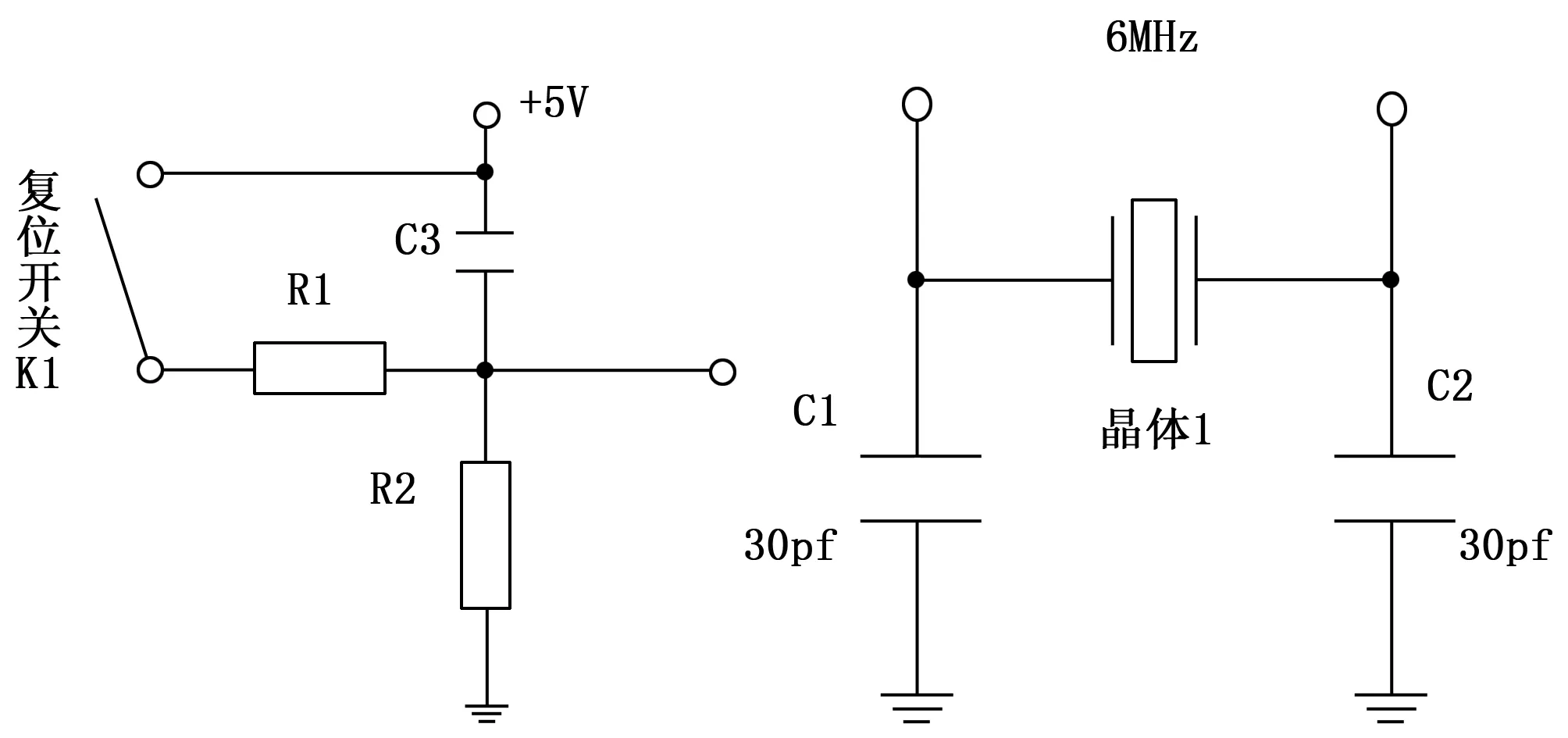
图7 复位电路图 图8 外部振荡电路

图9 +5 V直流电源设计电路
3.4.3 电路组成与工作原理
总体设计电路如图3所示。按下复位键K1后,RESET脚置高电平,完成电路状态初始化。ADC0809的模拟电压输入端IN0脚输入高度表的模拟高度电压信号,8 751单片机ALE脚输出使能信号启动74LS373锁存器,P0.0~P0.2脚输出地址选通信号到74LS373锁存器D0~D2,74LS373锁存器Q0~Q2脚输出选通信号到ADC0809的ADDA-ADDC脚,选通转换通道IN0端口。8 751单片机P3.6、P2.7、P3.7脚输出信号经或非门后,输出一个正脉冲到ADC0809的START、ALE脚,A/D转换启动。EOC脚输出转换结束信号脉冲,OE脚输出允许输出信号,这时就会在2-1-2-8脚输出8位转换完的二进制数据,该数据由8 751单片机IN0-IN7脚存储到寄存器内作为查表程序偏移量,此时A/D模块转换完成。
A/D转换后的数据存储到单片机内,作为查表程序的查表地址偏移量数据。高度数据的千位、百位、十位、个位、小数位表格预先存储到相应的存储区内,根据不同位表格的地址加地址偏移量查表,查得显示位的显示数据。经过循环5次循环查表,查得要显示的每位总共5个显示数据,完成非线性修正。
查表得到每位的高度显示数据后,LED显示程序启动。查表得到高度显示数据的段选BCD码和位选信号,输出到LED数码管的千位、百位、十位、个位、小数位循环显示出来。假设要显示的高度数据为1 190.6,则查表程序查得高度数据的第一位为‘81H’,单片机输出段选BCD码和位选信号,即P1.7~P0.0置数81H,段选BCD码0001由P1.3~P1.0脚输入到MC14558的A、B、C、D脚进行段译码,BCD码经过段译码为0000110(06H)经段驱动后加到位选段,0000110代表第一位LED的b、c段的阳极段输入高电平;同时P1.4~P1.6脚输出信号000到74LS138的A0~A2脚,P1.7输出高电平1到S1脚,使译码器工作。译码后脚输出信号01111经过位驱动后,加到位选段,此时LED数码管第一位的共阴极端D0脚置低电平,b、c段被点亮,LED数码管第一位显示出数字‘1’。这样经过5次同样的流程,数字1、1、9、0、6,分别在LED数码管的千位、百位、十位、个位、小数位循环显示出来。
4 软件程序设计
4.1 A/D转换程序
MAIN:
MOV R0, data ;置数据首地址
MOV DPTR, 7FF8H;P2.7=0,且指向通道0
MOV R7, 02H ;置通道数
LOOP:
MOVX @DPTR,A ;启动A/D转换
MOV R6, 0AH ;软件延迟
DLAY:
NOP ;等待
DLNZ R6,DLAY
MOVX A,@DPTR;读取转换结果
MOV @R0,A ;存储数据
INC R0 ;修改数据指针
MOV DPTR, 7FF9H;P2.7=0,且指向通道1
DJNZ R7,LOOP ;2个通道查完了吗
4.2 LED显示程序
DISPLAY:
MOV A,R5 ;取千位码
MOV P1,A ;显示千位数
MOV A,R4 ;取百位码
MOV P1,A ;显示百位数
MOV A,R3 ;取十位码
MOV P1,A ;显示十位数
MOV A,R2 ;取个位码
MOV P1,A ;显示个位数
MOV A,R1 ;取小数位码
MOV P1,A ;显示小数位数
AJMP: DISPLAY ;循环显示
4.3 非线性修正查表程序
ORG 0500H
START:
MOV A, data;偏移量送A
MOV DPTR,DTATAB0;千位数据表格地址送DPTR
MOV A , @A+DPTR ;查表
MOV R5,A ;千位数据存入R5
MOV A, data ;偏移量送A
MOV DPTR,DTATAB; ;百位数据表格地址送DPTR
MOV A , @A+DPTR ;查表
MOV R4,A ;百位数据存入R4
MOV A, data ;偏移量送A
MOV DPTR,DTATAB; ;十位数据表格地址送DPTR
MOV A , @A+DPTR ;查表
MOV R3,A ;十位数据存入R3
MOV A, data ;偏移量送A
MOV DPTR,DTATAB; 个位数据表格地址送DPTR
MOV A , @A+DPTR;查表
MOV R2,A ;个位数据存入R2
MOV A, data ;偏移量送A
MOV DPTR,DTATAB ;小数位数据表格地址送DPTR
MOV A , @A+DPTR;查表
MOV R1,A ;小数位数据存入R1
RET;返回主程
5 测试结果及分析
为了验证本设计数字化高度表指示器的性能,将其与磁电指针式高度表指示器在低高度(0~120米)和高高度(120米~1 200米),对比分析显示精度、测距误差、响应时间3个指标。将高度表高度计算电路输出的高度数据电流信号并行分为两路,一路加到磁电式指示器输入端,另一路加到数字化指示器输入端。分别记录低高度和高高度各50组高度数据,进行数值统计分析。忽略指针式指示器人为读数误差,将显示精度、测距误差、响应时间平均值计入表3和表4。

表3 低高度与磁电指针指示器性能对比

表4 高高度与磁电指针指示器性能比
可见,低高度数字化指示器显示精度为0.47米,磁电式指示器显示精度为2.5米。数字化指示器显示误差为高度的±0.68%,磁电式指示器显示误差为高度的±1.23%。在高度表变化时数字化指示器响应时间为0.06秒,磁电式指示器响应时间为0.82秒;高高度数字化指示器显示精度为4.7米,磁电式指示器显示精度为30米。数字化指示器显示误差为高度的±1.33%,磁电式指示器显示误差为高度的±3.95%。数字指示器响应时间为0.06秒,磁电式指示器响应时间为0.82秒。由此可见,本设计数字化显示器在性能上远远超出了传统磁电指针式高度显示器。
6 结论
本文设计电路综合了模拟电路分析、数字电路转化、单片机系统和接口电路设计以及应用编程的运用,电路整体性好、兼容性高、适用范围广、可扩展功能性强、电路设计费用低,
在模拟电路的数字化处理方面具有一定的典型性和创新性。
[1]何立民.MC-51系列单片机应用系统设计-系统配置与接口技术[M].北京:北京航空航天大学出版社,1993.
[2]朱 勇.单片机原理与应用技术[M].北京:清华大学出版社,2006.
[3]江国强.新编数字逻辑电路[M].北京:北京邮电大学出版社,2006.
[4]洪杰峰,等.基于51单片机的边界扫描控制器的设计与实现[J].计算机测量与控制,2014,22:3088-3089.
[5]冯 源,豆海利,赵 刚.基于S12X系列双核单片机的CAN网关设计[J].计算机测量与控制,2016,24:47.
[6]刘雨鑫,刘诗斌,荣皖芳.一种用于白光LED的亮度控制电路[J].计算机测量与控制,2009(7):555.
