作战用固定翼无人机落地姿态平衡控制系统设计
2018-03-27,,
,,
(中国人民解放军 陆军步兵学院(石家庄校区),石家庄 050227)
0 引言
无人机具有不载人飞行、可远程遥控导航等特点,适用于在恶劣环境中执行危险任务,具有广阔的军事前景[1]。作战用固定翼无人机可实现倒飞、侧飞、前飞和悬停等多种飞行姿态[2]。但在飞行过程中,常会受到电磁和风阻等干扰,因此对固定翼无人机姿态平衡进行精准控制是当前研究的重点难题[3]。目前针对固定翼无人机姿态平衡控制已有些许研究成果。基于视觉的固定翼无人机控制系统,通过提取无人机特征点数量,安设传感器辅助无人机进行位置信息测量,融合三维加速度信息和EKF方法,获取无人机位置信息,选用RISE非线性控制器和PID完成作战用固定翼无人机姿态平衡控制。该方法的鲁棒性较好,但不能满足姿态测量的需求[4]。基于载荷参数的无人机控制系统根据环境判断信息,通过参数编码,将自定义的协议指令传送到硬件控制电路中,完成对无人的控制,该方法可以准确确定无人机的地理位置,但不能在短时间内调回平稳姿态[5]。为解决上述问题,提出一种作战用固定翼无人机落地姿态平衡控制系统设计方法。采用CMOS模拟多路复用器的ADG508单芯片,对硬件电路和软件部分进行设计,通过磁强计和加速度计对无人机落地姿态进行测量,完成作战用固定翼无人机落地姿态的平衡控制。实验结果表明,该系统满足姿态测量的需求、可在短时间内调回平稳姿态、误差较低。
1 硬件设计
要改善传统控制系统控制精度低、落地高度测量误差大等问题,则需设计一种作战用固定翼无人机落地姿态平衡控制系统。在系统设计过程中,可将系统划分为硬件部分和软件部分。先对硬件部分进行优化设计,系统硬件主要包括:电源电路、AD转换电路、信号采集电路、时钟复位电路、存储扩展电路及调试与通信接口电路。各电路具体描述如下。
1.1 电源电路
处理器芯片ADSP-2163在作战用固定翼无人机的模拟电源、外部电源和内部电源都有独立的连接电源。作战用固定翼无人机模拟供电和内部供电要求为1.2 V,作战用固定翼无人机的外部供电要求为3.3 V。需要选择满足要求的电源作为作战用固定翼无人机的一级电源。电源转换芯片需要进行电压的变换以满足A/D转换器和传感器对电压的不同要求。采用MAX1951二级电压转换芯片为作战用固定翼无人机提供1.2 V的电压,MAX1837支持的输入电压最大为24 V[6],是高效的降压型转换器。通过外部电阻对输入电压和输出电压进行调整,采用9~12 V电池作为作战用固定翼无人机的一级电源,避免电路板过高影响传感器输出的问题,保证作战用固定翼无人机落地姿态平衡控制系统的稳定。
作战用固定翼无人机的A/D转换器为5 V电压,模拟多路复用器、角速度陀螺仪等组件为6 V,作战用固定翼无人机通过MAX6035产生3 V和5 V的基准电压,采用固定增益放大器得到6 V电压,满足改进控制系统电源电路的设计要求。给出电源电路设计图,如图1所示。
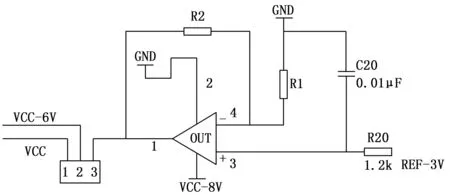
图1 电源电路设计图
1.2 AD转换电路
作战用固定翼无人机传感器的输出信号为电压信号,将无人机中的模拟信号采用AD转换电路变为可识别的DSP数字信号,作战用固定翼无人机落地姿态平衡控制系统的转换器芯片为逐次逼近型模数而且是16位的转换器。AD转换电路具有16位采样ADC、高速和低功率的多功能串行接口端口内置[7]。在CNV上升沿中,AD转换电路对IN-和IN+间的输出电压差进行采样,范围是0 V-REF。AD转换电路的基准电压由外部提供5 V,独立于作战用固定翼无人机落地姿态平衡控制系统的电源电压,其吞吐速率和功耗呈线性变化,AD7980能够和1.8~5 V进行接口,为AD转换电路提供小型10引脚QFN或10引脚MSOP封装。
在作战用固定翼无人机落地姿态平衡控制系统的转换电路中,将SDI接到VIO时,AD转换电路CNV上升沿转换启动,变为CS模式,将SDO变为高阻状态,直到转换完成为止。AD转换电路完成转换后,AD7980关断进入采集状态。AD转换电路的最高有效位到达SDO时,CNV为低电。剩余的数据位通过SCK下降沿输出,通过SCK下降沿作战用固定翼无人机的数字主机能够快速读取速率。在AD转换电路的CNV变为高点平或完成第16个下降沿后,SDO为高阻状态,给出传送时序图如图2所示。
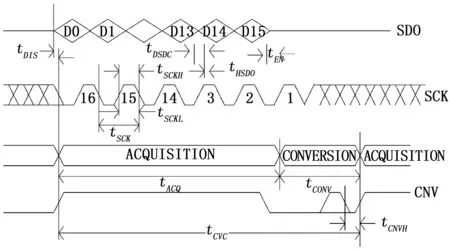
图2 传送时序图
1.3 信号采集电路
作战用固定翼无人机落地姿态平衡控制系统采用CMOS模拟多路复用器的ADG508单芯片,ADG508单芯片具有4个双通道和8个通道。ADG508单芯片通过一个输入状态和3个二进制地址将八路输入通道中的一个通道转到公共输出。采用LC2MOS方法对ADG508进行设计,使ADG508单芯片能够在任意双电源和单电源中工作,具有低导通电阻和高开关速度的特性,图3为信号采集电路的电路图。

图3 信号采集电路
作战用固定翼无人机落地姿态平衡控制系统的遥控接收信号通过74LVC541芯片进行采集。74LVC541A是八进制非反相缓冲器带,为5 V电压输出和输入。74LVC541芯片通过无人机的CPLD采集信号。
1.4 时钟复位电路
作战用固定翼无人机在工作时会受到窄脉冲形式的干扰,使作战用固定翼无人机出现故障。作战用固定翼无人机的CPU在执行任务时受到窄脉冲形式的干扰,造成无人机CPU地址码或操作码出现改变,导致执行的指令出错,此时CPU会执行错误的指令,将错误的操作数当做操作码来执行,导致作战用固定翼无人机程序进入“死循环”或“跑飞”的状态。作战用固定翼无人机落地姿态平衡控制系统使用硬件Watchdog技术[8]解决“死循环”和“跑飞”的问题,使作战用固定翼无人机的程序恢复正常运行。
作战用固定翼无人机落地姿态平衡控制系统采用Watchdog定时器和具有高电平有效复位输出的MAX813L微处理器对无人机电路复位进行监控,图4为时钟复位电路图。
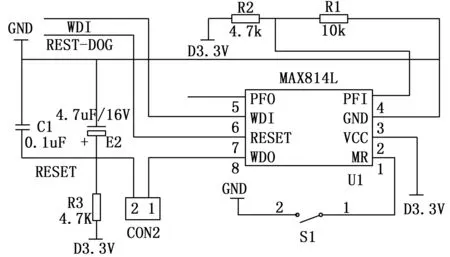
图4 时钟复位电路图
1.5 存储扩展电路
对作战用固定翼无人机落地姿态平衡控制系统存储器进行外部扩展,提高无人机飞行控制的实用性、降低无人机飞行控制的复杂性。作战用固定翼无人机落地姿态平衡控制系统采用RAM存储器和Flash RMO存储器。Flash RMO存储器的容量大,是一种可擦出、掉电后信息不丢失的存储器。因为Flash RMO存储器具有掉电信息不丢失的特点,Flash RMO存储器可以用来存放作战用固定翼无人机系统需要保护的数据、启动代码、用户程序等数据。
1.6 调试与通信接口电路
JTAG用于对无人机控制系统进行调试、仿真及对芯片内部进行测试,是一种嵌入式调试技术[9]。无人机控制系统内部芯片具有测试电路TAP,采用JTAG技术对作战用固定翼无人机内部的节点进行测试。
完善上述各电路,并进行合理组建,完成作战用固定翼无人机落地姿态平衡控制系统的设计。为控制系统的软件设计奠定良好的基础。
2 软件设计
良好的硬件设备是作战用固定翼无人机落地姿态平衡控制系统的坚实基础,在精良的硬件设备基础上,系统的软件设计成为了确保改进控制系统控制精度的关键。系统软件设计即是通过对固定翼无人机落地姿态进行测量,完成无人机落地姿态平衡控制,从而实现改进控制系统软件的设计。具体设计过程描述如下:
作战用固定翼无人机中的陀螺仪有时会出现漂移的问题,而且作战用固定翼无人机陀螺仪中含有大量的噪声,会对作战用固定翼无人机落地姿态的平衡控制造成一定的影响。作战用固定翼无人机落地姿态平衡控制系统采用磁强计和加速度计对作战用固定翼无人机落地姿态进行测量。
作战用固定翼无人机自身没有加速度的情况下,其俯仰角和滚转角的确定通过三轴加速度计测量作战用固定翼无人机本体坐标系下的三轴分量完成。

作战用固定翼无人机的滚转角和俯仰角的计算公式为:
(1)
式中,g代表的是地球重力,公式(1)适用于作战用固定翼无人机静态姿态时的测量。

(2)
公式(2)能够得到独立的两个方程,已知θ、φ、ψ中的一个可以确定作战用固定翼无人机的两个姿态角。作战用固定翼无人机落地姿态平衡控制系统采样磁强计和加速度计组合的无人机姿态测量方法,该方法通过加速度计可以得到θ和φ,已知θ时,可以得到:
(3)
已知φ时,可以得到:
(4)
0-2π为作战用固定翼无人机偏航角的取值范围,由公式(3)、公式(4)和真值表1可得到偏航角的计算公式:
(5)
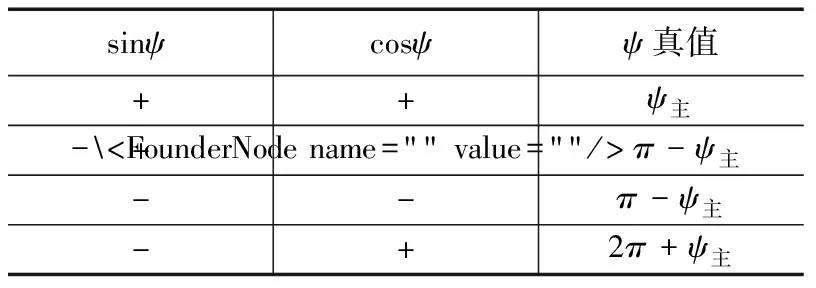
表1 ψ真值表
结合上述控制系统硬件和软件设计,完成了作战用固定翼无人机落地姿态平衡控制系统的设计。
3 实验结果分析
为了验证所设计的作战用固定翼无人机落地姿态平衡控制系统的性能,本次实验选择在天津郊区的一块视野良好的区域完成,其大小为5 km×3 km,海拔约为25 m。
无人机常因对落地高度测量不准确,导致其落地姿态不平衡。采用改进系统和传统系统进行落地高度测量,比较两种不同系统的落地高度测量误差,对比结果如图5所示。

图5 两种不同系统的落地高度测量对比结果
分析图5可知,传统系统测量的高度与实际高度存在较大的误差,改进系统测量的高度与实际高度基本一致,因为作战用固定翼无人机落地姿态平衡控制系统的采集电路采用CMOS模拟多路复用器的ADG508单芯片,能够在较宽的电管电压中工作,采集的数据较为精准,验证了改进系统落地高度测量更准确,误差较小。
在作战用固定翼无人机落地姿态平衡控制系统中的扰动信号为一阶跃信号,一阶跃信号代表的是作战用固定翼无人机落地姿态平衡控制系统在平稳的状态下,受到扰动倾斜了一定的角度,其中倾斜角度主要包括俯仰角、横滚角和偏航角,这3个角度的大小是判断作战用固定翼无人机是否能够快速调回平稳姿态的重要指标,也是验证改进系统性能是否优良的关键因素。
首先对作战用固定翼无人机落地姿态平衡控制系统的俯仰角进行测试,分别将改进系统与传统系统应用到作战用固定翼无人机上,实验采用磁强计和加速度计对作战用固定翼无人机落地姿态进行测量,将测量后的结果传送到时钟复位电路,时钟复位电路对作战用固定翼无人机倾斜的角度进行调整,测得两种不同系统俯仰角的对比结果如图6所示。
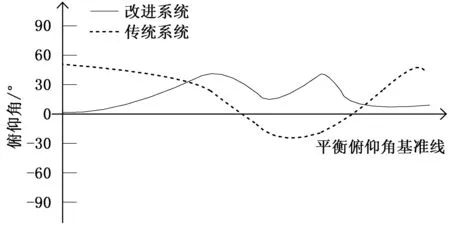
图6 两种不同系统俯仰角对比结果
观察图6可知,以平衡俯仰角基准线为基准,分别采用传统系统和改进系统对作战用固定翼无人机落地姿势平衡进行控制实验,传统系统的俯仰角从50°开始下降,后有上升至50°,角度变化幅度大,偏离基准线远。改进系统的俯仰角曲线保持在基准线上方变化,其坡峰,即最大俯仰角为40°。改进系统俯仰角曲线距离基准线较近。对比两种系统的实验结果可得,改进系统的俯仰角均小于平衡最大俯仰角,且俯仰角变化相对平稳,充分说明改进系统的平衡控制效果更好,验证了系统的可行性。
对作战用固定翼无人机落地姿态平衡控制系统的横滚角进行测试,分别采用传统系统和改进系统进行无人机落地姿态平衡控制,测得两种不同系统横滚角的对比结果如图7所示。

图7 两种不同系统横滚角对比结果
观察图7可知,图7(a)为保持平衡的横滚角范围,平均值约为60°。图7(b)为传统系统横滚角范围,采用传统系统对无人机落地姿态进行平衡控制,其横滚角平均值约为90°,远远超出平横横滚角范围,说明传统系统平衡控制效果较差。图7(c)为改进系统横滚角范围。采用改进系统进行平衡控制,其横滚角平均值约为50°,且大面积与平衡横滚角范围重合。将两种系统的实验结果进行对比发现,改进系统的横滚角与平衡横滚角范围基本保持一致,充分说明改进系统的控制效果更好,验证了系统的有效性。
最后对作战用固定翼无人机落地姿态平衡控制系统的偏航角进行测试,分别将传统系统和改进系统应用到作战用固定翼无人机,观察无人机偏航角变化,并对测试结果进行记录,测得两种不同系统横滚角的对比结果如图8所示。

图8 两种不同系统偏航角对比结果
由图8可得,传统系统的偏航角随实验次数的增加而大幅度增大,在第7次试验时,偏航角达到最大值为9°。改进系统的偏航角曲线近乎为一条直线,其偏航角并不随试验次数的增加而增大,而是保持在1°左右。对比两种系统偏航角实验结果,改进系统的偏航角远远小于传统系统的偏航角,且无论经过多少次试验,其偏航角均保持在0.5°的误差范围内,充分说明改进系统的控制效果更好,验证了系统的实用性。
为了验证作战用固定翼无人机落地姿态平衡控制系统的性能,对作战用固定翼无人机落地姿态平衡控制系统进行测试,得到改进系统的输出姿态角如图9所示。
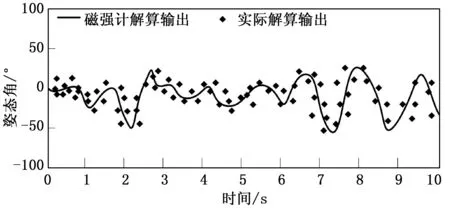
图9 姿态角测量结果
分析图9可知,通过作战用固定翼无人机陀螺仪输出角速率积分得到的作战用固定翼无人机落地姿态角随着时间的增加漂移的幅度不断波动,通过无人机磁强计得到的作战用固定翼无人机落地姿态角与实际的无人机落地姿态角的均值接近。测量结果较为精准,没有出现无人机落地姿态漂移的问题,可以满足作战用固定翼无人机落地姿态平衡控制系统对姿态测量的需求。
综合以上试验,充分说明所设计的作战用固定翼无人机落地姿态平衡机控制系统对无人机落地高度测量误差小,落地俯仰角、横滚角及偏航角小,衡控制效果明显提高,具有一定的可行性和有效性。
4 结论
无人机落地姿态控制系统对作战用固定翼无人机性能的影
响巨大,设计出一种作战用固定翼无人机落地姿态平衡控制系统,对系统硬件部分的主要电路进行介绍,优化设计系统软件部分,采用磁强计和加速度计对作战用固定翼无人机落地姿态进行测量,通过实验验证了该系统的性能,为以后固定翼无人机飞控系统的研究奠定了基础。
[1]薛 亮, 王新华, 贾 森,等. 基于模糊PID的多旋翼无人机姿态控制系统设计[J]. 电子设计工程, 2016, 24(16):61-63.
[2]张兴文, 陈 铭, 曹 飞,等. 无人机姿态控制系统设计及仿真[J]. 计算机仿真, 2016, 33(7):158-161.
[3]刘 强. 四旋翼飞行器控制系统的研究[J]. 科技通报, 2016, 32(4):121-125.
[4]傅忠云, 朱海霞, 孙金秋,等. 两轮载人自平衡车姿态测量单元设计[J]. 科学技术与工程, 2015, 15(15):66-71.
[5]张 鹏, 王 键. 小型固定翼无人机纵向姿态控制律的研究[J]. 计算机测量与控制, 2015, 23(8):2686-2688.
[6]费爱玲, 李 柠, 李少远. 固定翼无人机的自抗扰反步控制[J]. 控制理论与应用, 2016, 33(10):1296-1302.
[7]董守田, 杨利红, 康成吉,等. 固定翼无人机姿态控制及仿真[J]. 东北农业大学学报, 2015, 46(9):87-92.
[8]曹美会, 鲜 斌, 张 旭,等. 基于视觉的四旋翼无人机自主定位与控制系统[J]. 信息与控制, 2015, 44(2):190-196.
[9]赵海盟, 张文凯, 谷静博,等. 无人机载荷航拍控制系统设计[J]. 计算机应用, 2015, 35(1):270-275.
[10]江 杰, 冯旭光, 苏建彬. 四旋翼无人机仿真控制系统设计[J]. 电光与控制, 2015, 22(2):27-30.
