基于Trnsys平台的中央空调迭代学习控制研究
2018-03-27,,
, ,
(华南理工大学 自动化科学与工程,广州 510640)
0 引言
由于中央空调系统的复杂性,其模型难以准确建立,Trnsys仿真平台能有效解决这一问题。Trnsys仿真软件具有用于模拟建筑的模块,可以设置光照、自热、自冷、湿度、自然通风、室内人数、设备等参数,能够较为真实地模拟建筑系统特性及其扰动因素。至于控制方面,Trnsys虽自带有PID控制模块,但简单的PID控制难以达到理想的控制效果,为克服这一缺点,Trnsys提供了type155部件,能实现其与Matlab的连接。迭代学习控制适用于具有重复性的运动过程,中央空调系统的控制具有周期性,能够通过迭代学习控制获得较好的控制效果。本研究基于Trnsys平台搭建建筑和空调系统模型,通过与Matlab连接,在Matlab中编写程序实现迭代学习控制算法,以便于分析其控制效果。
1 Trnsys与Matlab联合仿真系统
1.1 TRNSYS仿真平台及模型建立
TRNSYS的全称为Transient System Simulation Program,即瞬时系统模拟程序。Trnsys的模块化分析法简化了系统建模,其包含71个标准模块,美国的TESS机构在此基础上开发出与其同名的元件库,TESS库的增加完善了中央空调系统的建模,使供冷系统模拟计算、空调节能优化研究变得便捷,为本设计仿真奠定了基础。
本次仿真基于广州市某高校一幢教学楼其中一层,包括9个教室,进行中央空调末端风机的迭代学习控制研究。搭建的冷负荷建筑-空调系统模型如图1所示。
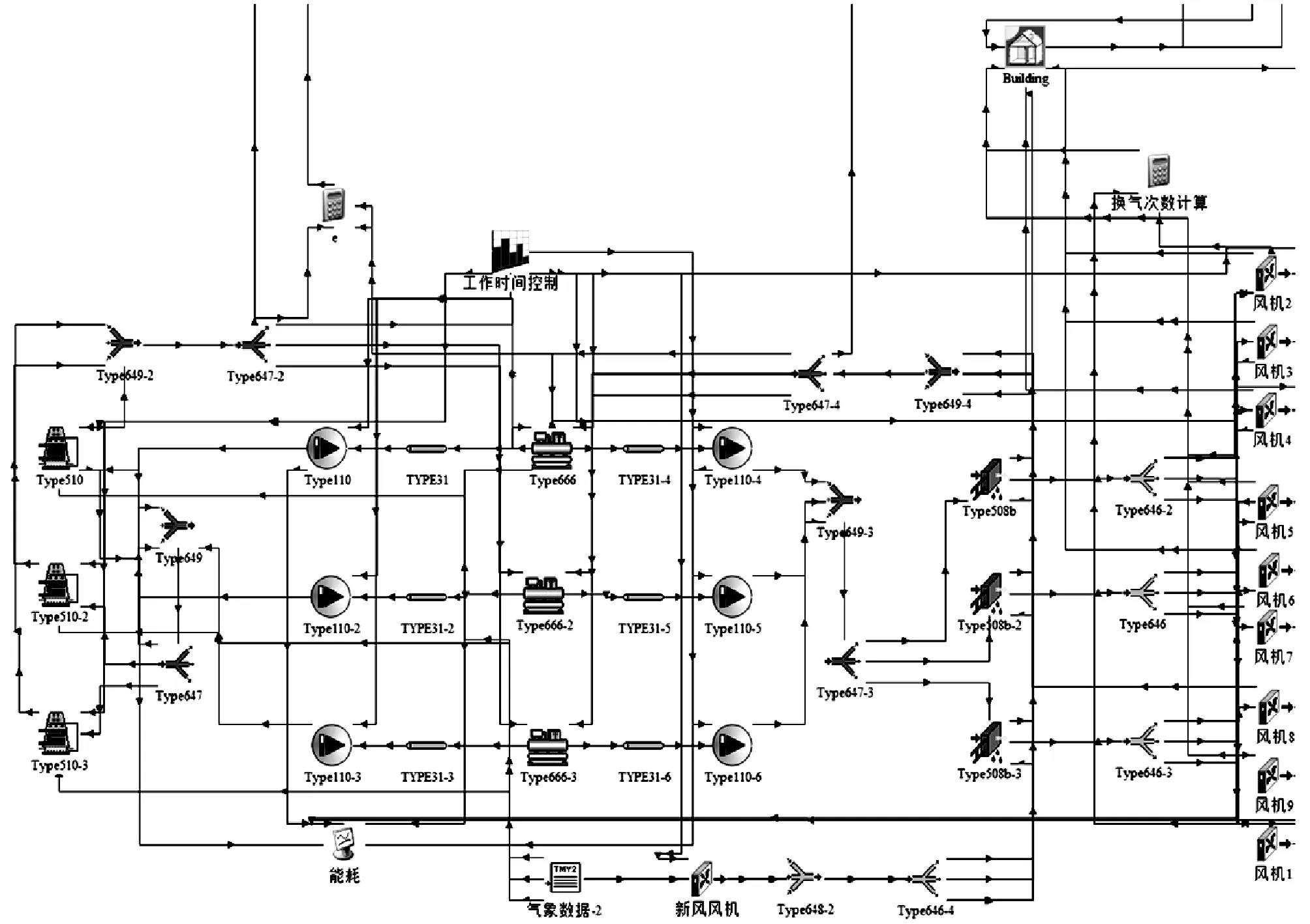
图1 冷负荷建筑-空调系统模型
1.2 Trnsys与Matlab通信原理
Trnsys与Matlab的连接通信是通过COM技术实现的。COM技术(Component Object Model,组件对象模型)提供与编程语言无关的方法实现一个软件对象,即两个用不同语言编程的对象,可以通过共同的接口实现通信[1]。Matlab通过C语言编写程序,Trnsys通过Fortran语言编写程序,Trnsys为这两种语言的连接提供了一个共同的接口——Type155,使这两个软件可以实现数据快速传递。
Trnsys接口文件中,包含trnInfo(1)~trnInfo(15)十五个信息序列,其中trnInfo(3)用于指定输入个数,trnInfo(6)用于指定输出个数,trnInfo(7)、(8)、(9)、(13)用于指定不同的呼叫。除此以外,在编程调试过程中,mFileErrorCode这个变量起着重要作用。在运行m文件之前,Trnsys会将mFileErrorCode变量初始值置1,将mFileErrorCode变量设为非1的值放入程序段,若运行出错导致仿真停止,则Trnsys会提示一个关于mFileErrorCode值的错误信息,以此定位出错的程序段,大大方便了程序的修改和调试。
Trnsys与Matlab的通信,是通过type155调用m文件实现的。调用的m文件是一个脚本文件,而非m函数,所以,所有由Trnsys传递过来的变量以及在m文件中定义的变量都在Matlab的工作空间中产生。运行过程中,所有m文件共享同Matlab工作空间,所以像trnInfo, trnTime等变量将会彼此覆盖,而其他自定义的变量亦是在Matlab工作空间中共享的,编程时需要注意区分不同变量的名称[2]。
2 中央空调末端控制策略
常用的VAV系统送风机控制方法有定静压控制法、变静压控制法、总风量控制法3种[3]。表1列出了对以上3种风机控制方法的优缺点对比。
本文采用优化的总风量控制方法,末端采用变频风机调节送风量,由于末端调节对管道系统的阻力特性影响较小且末端风机保证了送风压力,可有效消除风机调节与末端风量调节之间的耦合作用[4]。

表1 不同风机控制法性能对比
3 迭代学习控制
3.1 迭代学习控制概述
迭代学习控制(iterative learning control, ILC)是一种具有模拟人的学习过程的控制算法,类似于运动员“肌肉训练”、人的“循序渐进”的学习规律的智能控制。由于该算法具有学习规则简单、可行性高、控制效果稳定等优点,在智能控制领域得到了很大的关注,也在近几十年中得到了巨大的发展,在实际的生产中也得到了广泛应用[5]。
3.2 迭代学习控制原理
迭代学习控制通过对比系统的实际输出轨迹与原先给定的期望轨迹得到输出误差,从而得到偏差信号,并以此来获得新的的控制输入,由此增强系统的跟踪性能[6]。迭代学习控制的基本结构如图2所示。其中t∈[0,T],k表示迭代次数。在第k次运行中,输入信号uk(t)对应的被控系统输出为yk(t)。然后将得到的输出yk(t)与期望输出yd(t)进行对比获偏差信号ek(t),再将ek(t)与本次输入uk(t)通过迭代学习控制器设定好的算法获取新的输入uk+1(t)。然后,在接下来的新的一次运行过程中,新uk+1(t)被存储起来并作用于被控对象。显然,随着运行次数的增加,系统输出慢慢接近期望输出。
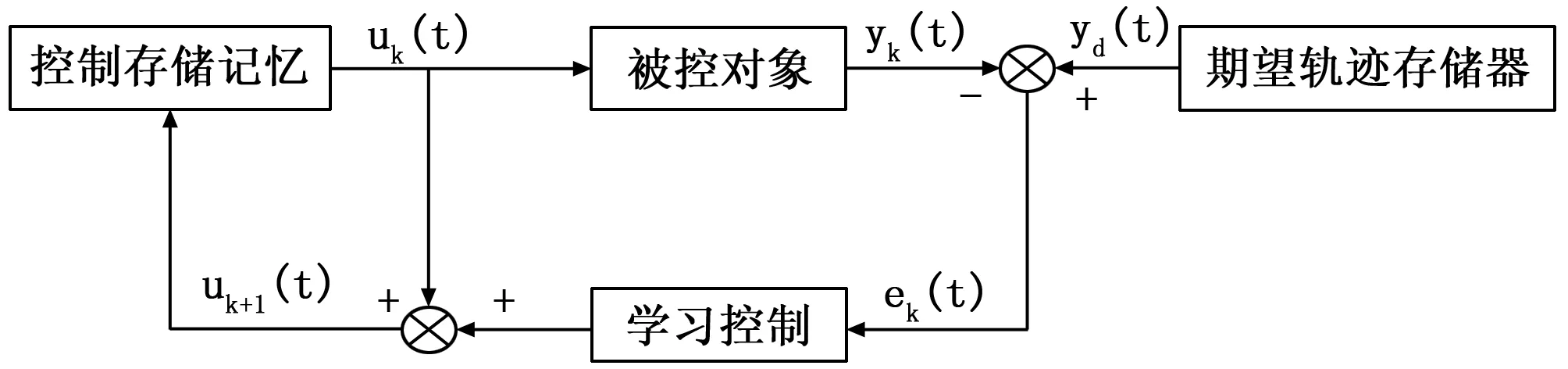
图2 迭代学习控制基本结构
3.3 迭代学习控制学习率
输出误差定义:
ek(t)=yd(t)-yk(t)
(1)
则控制输入uk+1:
uk+1(t)=uk(t)+U(ek(t),t)
(2)
学习率常见形式有:
P型学习律:
uk+1(t)=uk(t)+Lek(t)
(3)
D型学习律:
(4)
组合型学习律(PD型,PI型,PID型),PID型学习律表示为:
(5)
其中:Γ、L、Ψ为定常增益矩阵。算法中若使用的是上一次的误差ek称为开环迭代学习控制,若使用当前系统的误差ek+1则为闭环迭代学习控制,同时使用ek和ek+1则称为开闭环迭代学习控制[7]。
3.4 稳定性和收敛性
稳定是任何控制系统能够正常完成其功能的必要。但是,对于迭代学习控制系统,只达到系统稳定是不足够的。要使系统输入能随着迭代进行得到期望值,收敛性是必须的。
以离散时间的开环PD型迭代学习控制为例,下面给出其收敛性的充分条件的证明过程。
被控系统的动态过程为:

(6)
假设该系统在t∈[1,2,...T]上周期循环运行,且每次学习的初值x0相同,给定期望轨迹为yd(t)。用k=0,1,2,...,表示迭代次数,xk,yk和uk为系统第k次运行对应的状态,输出和控制输入,则系统可表示为:
(7)
输出误差:
ek(t)=yd(t)-yk(t)
(8)
对系统的开环PD型学习律为:
(9)
其中:Kp,Kd为学习增益矩阵。
假设式(6)所示被控系统在离散时间区域t∈[1,2,...T]上满足以下条件:



4)每次运行的初始误差为一收敛为零的序列;
5)存在唯一理想控制输入ud(t)似的系统的状态和输出为期望值xd(t),yd(t)。 其中F(t,u)为(t,u)的连续函数。
用式(9)所示的PD开环迭代学控制律对上述系统进行控制,使得输出yk(t)以任意精度跟踪yd(t)的充分条件为:
(10)
3.5 鲁棒性
上一节讨论的收敛性分析一般都是在理想环境下进行的。但在现实生产中,由于存在无法忽视的干扰,所以现实使用的迭代学习控制系统需要考虑在初始偏移、状态扰动、噪声干扰等情况下的系统的跟踪性能,即鲁棒性问题[8]。迭代学习控制系统的鲁棒性非常重要,其通常指的是被控对象运行过程存在干扰时,系统保持稳定的能力。
为了保证控制系统的鲁棒性,我们需要明确什么干扰情况下,迭代学习控制算法才是收敛的。即实际运行中,由于某种或某些扰动的存在,初态误差并无法被控制系统修正,且输出信息采集也存在无法避免的误差[9]。而在这样的条件下控制量还能收敛到理想区域,就是我们需要研究的迭代学习控制的鲁棒性收敛问题。若离散时间系统的运动特性为:
(11)

采用学习律:
uk+1(t)=uk(t)+Γk(t)ek(t)
(12)
式中,ek(t)=yd(t)-yk(t),Γk(t)为可逆增益矩阵。
定理1:期望轨迹yd(t),将迭代学习律用于系统(11)中,若:
(13)
那么控制序列{uk(t),t∈[0,T]} 对于所有k有界。即存在bu,使:
(14)
定理2:期望轨迹yd(t),将迭代学习律用于系统(11)中,若对于任何给定初态x0,即确定性输入扰动η0(t)(t∈[0,T]):
(15)
(16)
那么,迭代输出轨迹yk(t)在t∈[1,2,...T]上一致收敛于yd(t),即:
(17)
3.6 学习速度
学习速度为系统的输出与期望值得差值收敛到给定范围时系统迭代的次数。学习速度是一个学习算法质量高低的指标之一。就目前的研究成果来看,对于迭代学习速度的结论主要归纳与下面几点:
1)闭环迭代学习控制收敛速度明显比开环迭代学习控制收敛速度快许多;
2)学习律不变时,系统的收敛性和学习律存在着一定的矛盾,即学习速度过快会导致系统丧失收敛性,而当收敛区域过大又会导致学习速度过慢;所以,为了权衡两者,需要对其参数进行适当调整。
3)每次运行的初始状态偏差项偏差越小时,收敛速度越快。初始控制越小,收敛速度越快;
为了获得较快的收敛速度,本文的仿真采用闭环PD型迭代学习控制算法。
4 其他控制算法
4.1 PID控制
在经典控制理论中,连续的输入e(t)、输出u(t)的PID调节器在零初条件下可描述为:
(18)
经过离散化可以得到全量式和增量式数字PID算式。相比于全量式PID,增量PID具有以下优点:
1)避免了累加求和计算,也就避免了计算精度不足而导致误差累积过大。
2)增量式只与前2个误差值有关,数据存储量较少,避免了位置式储存每一拍的偏差值,占用较大的内存空间。
3)每次在前一拍的基础上计算增量,即使增量计算有误差或者输出为零对系统运行影响较小。
基于增量式PID具有以上优点,采用的简单PID控制以及下面介绍的控制算法均采用增量式进行编程。
4.2 积分分离PID控制
为了进一步减小超调量以及缩短调节时间,考虑在原PID控制规律中加入积分分离。积分分离可有效避免饱和效应——控制信号在积分作用下累加,导致超出了物理输出范围,即u
4.3 不完全微分PID控制
微分控制器根据偏差值的变化趋势进行控制,属于超前校正,有助于减少超调,克服振荡。但因系统响应的偏差变化率只有在第一个采样周期作用明显,导致微分作用只在第一个采样周期起作用,且作用很强,容易溢出,在响应后期又容易引进高频干扰,在此引入不完全微分以改善这一问题。可以串接一个低通滤波器(一阶惯性环节)以抑制高频干扰影响;或用被控变量的变化率代替偏差变化率,则能改善系统动态性能,抑制高频干扰。
5 仿真结果
5.1 迭代学习控制
选取PD型学习率闭环迭代学习控制进行仿真,仿真时间区间选为4344~4512 h,即7月份的其中一周。设定中央空调系统每天的工作时间为7:30~22:00,为方便观察控制效果,同时显示空调的COP值(冷水机组性能系数),表示系统工作时间段。图3为PD型迭代学习控制作用下房间的温度变化曲线。
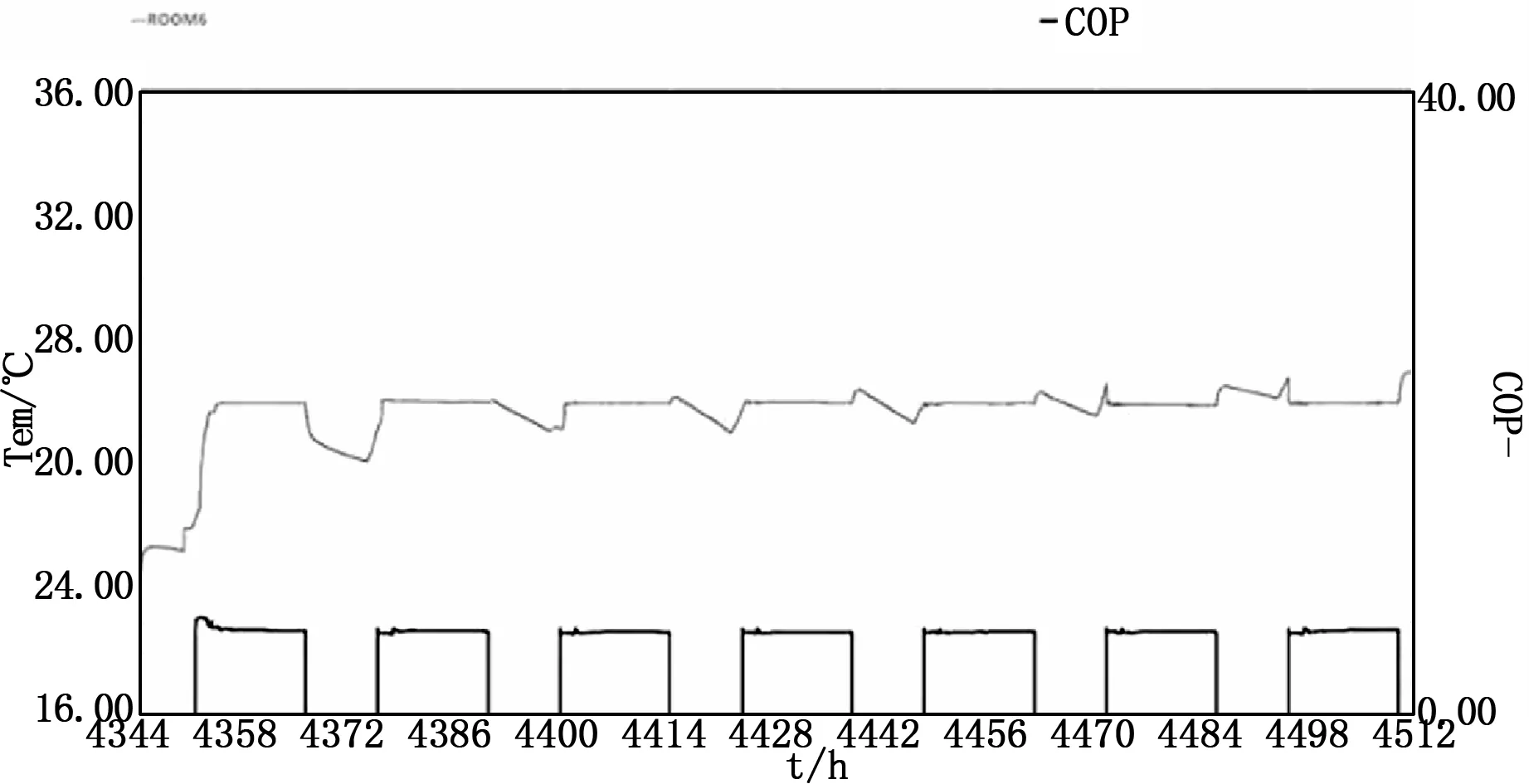
图3 PD型迭代学习控制温度曲线
系统第一天对目标温度曲线的跟踪仍存在一定的静态误差,且调节时间较长。在闭环PD型迭代学习控制作用下,经过2次迭代学习,输出温度便能无差跟踪目标温度,随着迭代次数的增加,控制效果越来越好。
5.2 其他控制算法
为客观分析迭代学习控制算法对于空调系统的控制效果,对规格、扰动参数等无关变量一致的房间,采取其他控制算法进行仿真。
图4展示了不同控制算法对室内温度控制的作用效果,包括迭代学习控制、简单PID控制、积分分离PID控制、不完全微分PID控制。

图4 不同控制算法下房间温度曲线变化
加入控制算法的温度曲线控制效果明显,能将室温维持于设定值26 ℃且达到一定程度上的节能效果。将第一天的响应曲线部分放大,如图5所示,简单PID控制明显出现了超调;积分分离PID虽能快速退饱和,减小或者避免超调的出现,但同时系统的暂态上升过程被放慢;不完全微分PID控制引入对被控量的微分而避免了对偏差值的微分,从而避免了给定值发生突变给系统带来超调或过大的冲击,其控制效果明显优于PID、积分分离PID控制。

图5 不同PID控制过渡过程
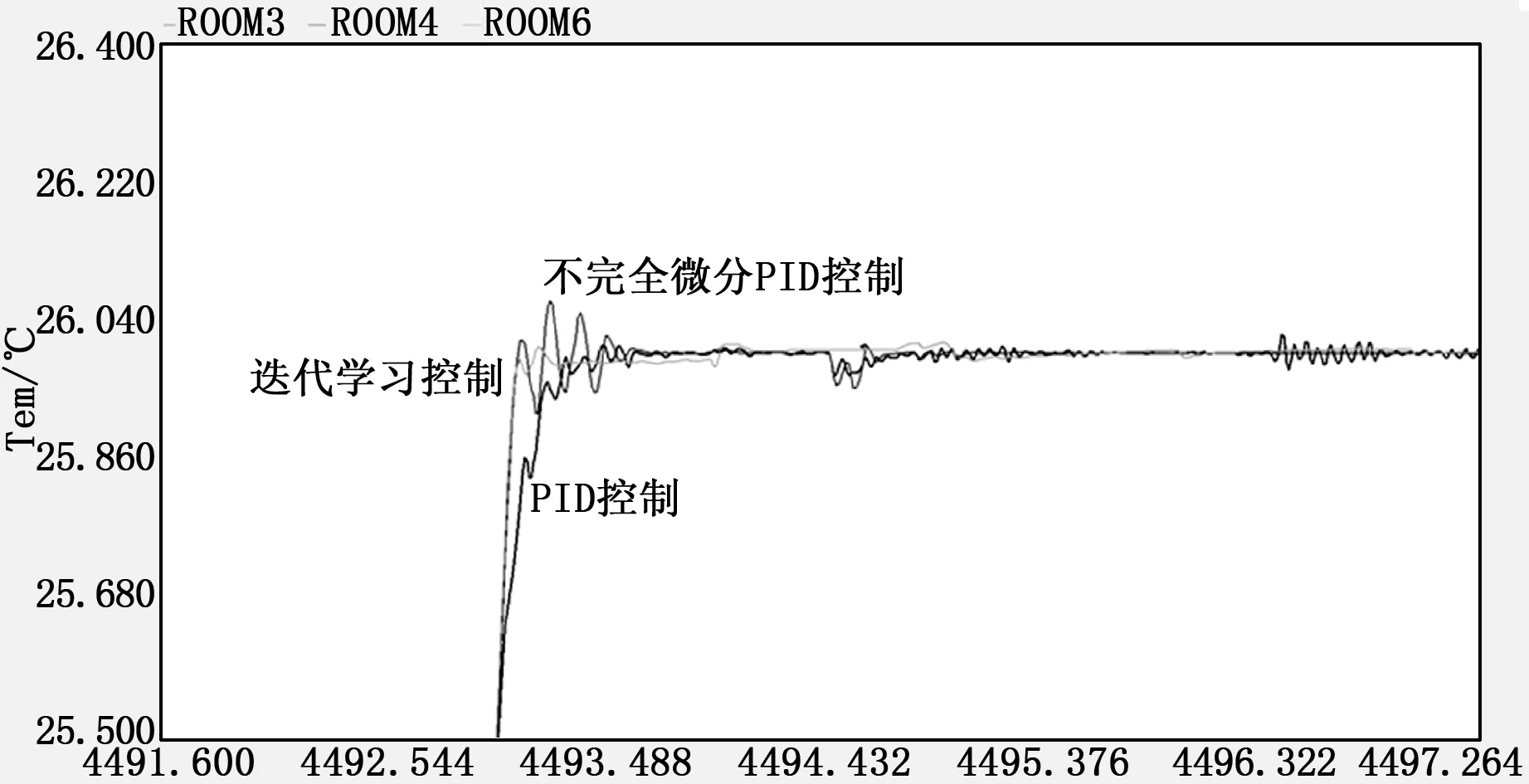
图6 迭代学习与PID控制效果比较
将第七天的温度响应曲线放大,如图6所示。普通PID控制调节时间比较长,进入稳态后温度曲线因干扰作用而存在一定的抖动;不完全微分PID控制虽有一定幅度的超调,但响应较迅速,在不完全微分的调节下,能有效抑制高频干扰;迭代学习控制的温度曲线响应迅速且温度曲线平稳,经过多次迭代学习,控制精度较高,相较于其他算法控制效果较好。
6 结论
通过Trnsys仿真平台搭建建筑-空调系统模型,能较好地模拟真实的对象,联合MATLAB编写控制算法,能较好地检验算法的控制效果。本文介绍了迭代学习控制算法,通过仿真验证了PD型迭代学习控制随着迭代次数的增加,控制效果越来越理想,应用于周期性工作的中央空调系统的控制是非常合适的。
[1]张文彬.MATLAB和TRNSYS实时动态仿真技术.上海市制冷学会2009年学术年会论文集[A].上海市制冷学会[C].2009.
[2]刘羽岱. 基于模型预测控制的空调系统运行优化仿真研究. 上海市制冷学会2013年学术年会论文集[A].上海市制冷学会[C].2013.
[3]李玉街. 智能模糊控制技术在中央空调节能控制中的应用[J]. 电力需求侧管理,2007(5):77-78.
[4]李 巧,徐晓宁,蒋仁娇,等. VAV空调系统总风量控制方法探讨[J]. 建筑科学, 2014(10):47-50.
[5]王丹凤,李书臣,翟春艳,等. 基于神经网络参数优化的迭代学习控制算[J]. 河南科技大学学报(自然科学版),2008(6):42-44.
[6]陈 娟. 迭代学习控制方法在注塑机注射保压全过程中的应用[D].沈阳:东北大学,2008.
[7]徐 敏. 基于迭代学习控制理论的励磁控制研究[D].西安:西北工业大学,2005.
[8]魏燕定. 提高迭代自学习控制算法收敛速度初探[J]. 控制理论与应用,2001(2):314-316.
[9]于洪林. 平板硫化机的现状和发展趋势[J]. 橡胶技术与装备,1995(5):22-28.
