基于可见光通信和数字图像处理的车辆智能防撞系统
2018-03-24魏丹贾子彦
魏丹 贾子彦
摘 要:文中设计了一种将可见光通信技术和数字图像处理技术相结合的车辆智能防撞系统。该系统主要作用于前后跟车行驶的两车之间,可实时监控两车之间的相对运行状态,当系统发现两车之间可能发生碰撞时,及时提醒驾驶人或采取自动制动措施,防止碰撞等危险发生。
关键词:可见光通信;数字图像处理;智能;防撞
中图分类号:TP39;U461.91 文献标识码:A 文章编号:2095-1302(2018)03-0-04
0 引 言
家庭汽车逐步成为我们日常生活中必不可少的交通工具之一,家庭汽车数量激增所带来的道路交通压力和道路交通安全隐患值得我们特别重视。为了进一步保障道路交通安全,除了要制定更加合理的道路交通安全规章制度、规范驾驶人的驾驶行为以外,如何进一步提高车辆本身的安全性能也是近年来研究的重要方向。随着车辆智能化技术的发展,可以通过车辆的智能系统实时监测前方路况,及时发现危险并采取相应措施,以有效避免碰撞危险的发生,提高车辆的安全性能。
1 车辆智能防撞系统的设计
本文所设计的车辆智能防撞系统将数字图像处理技术与可见光通信技术相结合,使车辆具有车间通信以及前方路况探测的功能,从而实现对前方路况信息的判别,并能够及时采取警示处理措施以防车辆发生追尾碰撞事故。
本文中可见光通信技术主要运用于车辆之间,以可见光通信的方式实现车间通信。目前,车辆正在使用的刹车灯和车尾示宽灯可经简单的电路改造成为可见光信号的发送端。车辆的速度和加速度等信息可以通过相应的传感器获得并传递给改造后的刹车尾灯和车尾示宽灯,车灯可以通过亮灭变化将该车的速度和加速度以可见光信号的形式发送出去。
车辆前端安装一个高速摄像机,高帧率地实时记录前方路况信息,以此完成系统信息的采集。系统再利用数字图像处理技术对高速摄像机记录下来的连续多帧图像进行处理分析,提取到前车发送的可见光信号;通过视觉图像中的目标物测距过程可获得前车的相对位置信息。
智能防撞系统的判别决策模块将获得的相对车速、车距信息代入安全距离模型,将实时跟车距离与对应运行状态下的安全距离进行比较。当实时跟车距离小于对应的安全距离时,判别决策模块将发出信号给执行模块,执行模块中的声光报警器动作,警示驾驶员;当实时跟车距离小于一级临界安全距离时,执行模块在对驾驶员进行声光报警的同时,采取相应的自动制动措施。从而保证车辆能够在危险发生前及时采取措施,防止跟车行驶过程中碰撞事故的发生。图1所示为车辆智能防撞系统的工作流程。
2 车辆智能防撞系统的系统组成
本文所设计的车辆智能防撞系统主要由信息采集模块、数据信息处理模块、判别决策模块和响应执行模块组成。系统组成框图如图2所示。
2.1 信息采集模块
信息采集模块主要通过安装于车辆前端的高速摄像机对前方视野进行拍摄获得实时记录的连续多帧图像。实时记录的连续多帧图像主要包括正常跟车行驶过程中前车在本车前方视野中的图景。所采集到的连续多帧图像中所包含的信息包括前車尾部示宽灯或刹车尾灯发送的可见光信号及前车与本车相对距离信息。可见光信号包含前车的速度和加速度信息。
2.2 数据信息处理模块
数据信息处理模块主要通过数字图像处理技术对信息采集模块所采集的连续多帧图像进行处理,经图像的帧间差法、图像区域划分等过程提取可见光信号并获得车辆间距信息。可进一步对提取到的可见光信号进行解码,获得相应的前车速度和加速度等运行状态信息。
2.3 判别决策模块
判别决策模块根据数据信息处理模块获得的信息,判断本车是否有追尾的可能。当警示判别模块认为本车可能与前车发生追尾碰撞危险时,判别决策模块将给予执行模块相应的警示执行信息。
2.4 响应执行模块
执行模块根据警示判别模块发送的警示执行信息,对本车内的声光报警器或刹车进行相应的动作,及时警示驾驶员并在必要时自动制动以防本车与前车发生追尾碰撞。
3 基于数字图像处理的车辆识别通信和距离测算
3.1 基于车尾灯的车辆识别
(1)基于刹车尾灯的车辆识别利用了刹车尾灯的红色特性。利用数字图像处理技术可以将读入的RGB模型图像转换为HSV模型图像,H,S,V分别代表色彩的饱和度、色调和明度,将刹车尾灯的红色特征进行图像分割时,可以通过设置合适的H,S分量阈值,识别刹车尾灯区域[1]。图3所示为系统采集读入的RGB图像,图4所示为对应转换的HSV图像。
将S分量二值模板作用于H分量图像,比阈值大的像素点值被赋值为1(白),小于或等于阈值的像素点值被赋值为0(黑)。根据红色在HSV颜色空间的分布规律,本文选取的分量阈值范围为:
0.45 0° 其中H分量的角度取值范围根据HSV模型周角360°可换算成归一化的取值范围: 0 刹车尾灯分割并标记识别图如图5所示,由图可知,利用此方法可以基本识别出刹车尾灯区域,并将刹车尾灯区域标记了出来。 (2)基于车尾示宽灯的车辆识别利用了车尾示宽灯的亮度特征。采用LED光源的车尾示宽灯作为一种不以照明为目的的辅助提示灯具,灯光分散,亮度特征明显。目前,大多数汽车的车尾示宽灯所使用的灯泡仍为卤素灯泡,采用LED光源的车尾示宽灯还未大量普及。因此,本文先对同样采用LED光源的日间行车灯进行实验验证。 HSV空间下的V分量图像无图像的色彩信息,每个像素点的值表示该像素点的明亮程度。灯亮时,灯在图像上的V分量值范围约为: 0.9
通过实验对比发现,直接通过V分量取值范围获取的二值图像的效果不如以V分量的值作为图像分割的阈值分割图像转换为二值图像好。本文选定作为二值化图像阈值的V分量值为0.95。对初步分割出的二值图像作进一步的形态学处理,可以有效地标记出车灯位置。
3.2 车间通信的实现
本文实现车间通信的方法是后车系统利用数字图像处理技术对高速摄像机采集的图像信息进行分析,提取出可见光信号,进而解码获悉前车的运行状态信息。
本文就该部分内容进行了实验环境下的验证。将LED灯的信号接口通过串口线与PC机相连,打开PC机上的串口助手,设置串口助手以波特率为300的速率定时发送十六进制字符串‘AA,‘AA对应的二进制位编码为‘10101010。该串口助手发送的数据格式为8位数据位和1位标志位,且标志位为‘0。设置高速摄像机的帧率为1 500 fps,即五倍的采样频率以确保信息能被有效采集。
待高速摄像机完成图像信息的采集后,利用数字图像处理技术对采集到的连续多帧图像进行处理,主要通过帧间差法提取到LED灯亮、灭分别对应的编码信息。本文利用Matlab软件强大的计算分析性能及其图像处理工作箱进行相应的图像处理[2]。
图6所示为Matlab环境中提取到的LED灯以可见光信号发出的数据部分的编码。第一个编码出错是由于采样图像其实部分的随机性,将数据分布的状态翻转当成了标志位处的状态翻转。对后面提取到的编码予以纠正。编码‘10101010对应的十六进制字符串正是发送的‘AA。
3.3 车辆间距测算
前后两车之间的距离信息也是摄像机采集的前方路况图像中所包含的重要信息之一。通过数字图像处理技术获悉的两车之间距离信息是防止前后两车发生碰撞的重要依据之一。
本文采用了单目视觉下的单帧静态图像测距法对车辆间距进行测算[3]。图7所示为沿车辆行驶方向的单帧静态图像测距原理图。
其中:f表示摄像机的有效焦距,?表示摄像机的仰俯角,h表示摄像机的安装高度,坐标(x0,y0)所表示的点为图像物理坐标系的原点,即摄像机光轴与成像平面的交点。点P为前方车辆尾部在路面上的垂直投影位置,P点投影在成像平面上,图像上的投影点在图像物理坐标系中的坐标为(x,y)。
本文对该部分进行了仿真实验。通过实际测量获得摄像机的外部参数?和h,通过摄像机标定获得摄像机的内部参数f和光心坐标(x0,y0)。本文采用张正友标定法并利用Matlab的应用工具Camera Calibrator对摄像机进行标定[4]。图8所示为用于摄像机标定的不同角度的标定板。图9所示为摄像机标定完成后获得的摄像机内部参数。
即fx=3 453.4,fy=3 453.3,x0=1 543.8,y0=2 128.6。将摄像机的内外参数以及图像中所测点的像素坐标代入测距公式,即可测算出对应的实际距离。实验结果见表1所列。
实验结果表明,通过图像中点的位置以及相关摄像机内部参数可以有效测算出图像中的点在实际空间中对应的实际距离。但距离测算的误差会随着距离的增大而显著提高。
4 车辆智能防撞决策
通过上述车辆的识别、通信、测距过程,可以获悉本车与前车的相对速度和相对距离等信息。本文建立了一个车辆智能防撞数学模型,利用车辆间的相对速度和相对距离信息,通过该数学模型及时做出危险判别并给出预警信号,使车辆能够及时采取措施,防止追尾碰撞危险的发生。
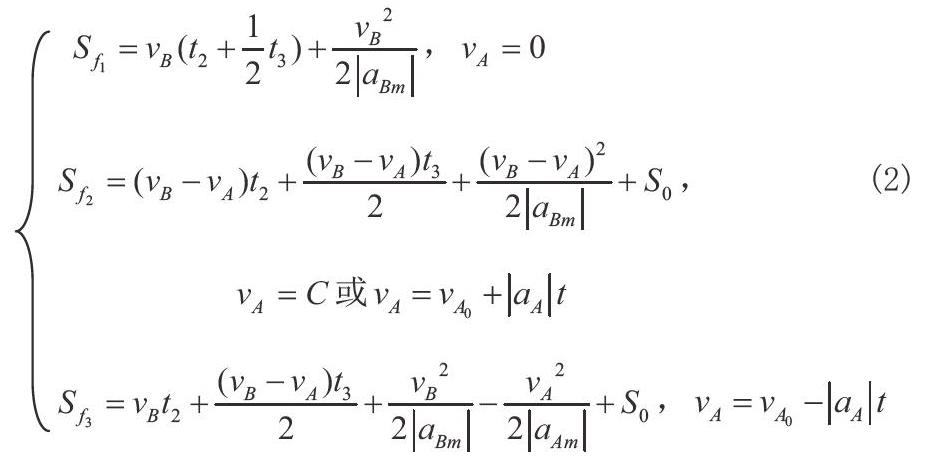
本文采用的行车安全距离模型建立在对车辆的减速制动过程分析上。根据前车运行状态的不同,安全距离模型的表达式也有所不同。主要分为前车停止,前车匀速或加速运动,前车减速或减速停止运动等三种情况[5]。安全车距模型为:
其中:Sf1,Sf2,Sf3分别为三种情况下的临界安全距离,vB,vA分别为前车和本车的实时车速,|aAm|,|aBm|分别为前车和本车的最大制动减速度绝对值,S0为危险解除时两车的最近跟车距离。
将通过制动过程分析获得的临界安全距离Sf作为一级安全距离D1,在此基础上加上设定的警示距离S*得到二级预警距离D2。根据相关参考文献调查,给驾驶员预留1 s的时间可避免90%的交通事故的发生[6]。又因交通法规定车辆在高速公路上的最高时速为120 km/h,即33.3 m/s,因而本文设定S*为45 m。图10所示为车辆智能防撞系统的防撞决策流程。
两车之间的实时跟车距离为DRT,结合一级预警距离D1和二级预警距离D2进行车辆防撞决策:
(1)若车辆间距DRT小于或等于临界安全距离D1,则启动车辆自动制动子程序和声光报警子程序,利用车辆自动制动系统使车辆立即制动减速的同时通过车内的声光器件对驾驶員报警。
(2)若车辆间距DRT介于D1与D2之间,则只启动声光报警子程序使声光报警器动作,通过声光报警的方式提醒驾驶员减速慢行。
(3)若车辆间距DRT大于二级预警距离D2,则说明两车之间的跟车距离较大,不易发生追尾碰撞,此时不做特别处理。
5 结 语
在整个道路交通状况日渐复杂的今天,车辆智能防撞系统作为一种辅助驾驶智能系统可以有效减少车辆行驶过程中追尾碰撞的发生,具有一定的研究意义和实用价值。本文提出的基于数字图像处理的车辆智能防撞系统,将可见光通信技术与数字图像处理技术相结合,充分发挥了可见光通信和数字图像处理的优势,在车辆智能防追尾碰撞研究的基础上提供了一定的探索基础。但由于个人能力以及当前客观条件所限,本文提出的系统仍有很多需要改进的地方。例如,本文在图像算法处理上需进一步改进以提高系统的适应性和准确性,在安全距离数学模型的选用上需进一步丰富以适应复杂路况的需求等。
参考文献
[1]高飞. Matlab图像处理375例[M].北京:人民邮电出版社,2015.
[2]赵小川.现代数字图像处理技术提高及应用案例详解:Matlab版[M].北京:北京航空航天大学出版社,2012.
[3]王亚丽.基于毫米波雷达与机器视觉融合的前方车辆检测研究[D].长春:吉林大学,2013.
[4]吴庆双,付仲良,孟庆祥.基于序列图像的摄像机自标定方法[J].计算机应用,2011,31(11):3010-3014.
[5]许颖,岳大军,赵洋,等.汽车防追尾系统中安全距离模型的研究[J].农业装备与车辆工程,2009(2):26-29.
[6]中华人民共和国道路交通管理条例[S].北京:中国法制出版社,2004.
[7]刘正岐,郭涛.对比色配色方案数字化生成技术的研究[J].物联网技术,2014,4(12):59-60.
[8]程结园,张涛.基于图像处理的智能车辆系统[J].物联网技术,2014,4(6):45-47.
