风速前馈与模糊PID结合的变桨距控制
2018-03-16金鹏飞肖立健
金鹏飞, 谢 源, 王 杰, 肖立健
(上海电机学院 电气学院,上海 201306)
为了确保风力发电机组在额定风速以上能安全稳定运行,通常通过变桨距的方式限制风力发电机组吸收的功率,即通过改变桨距角的大小来改变风力发电机组的风能利用系数,使机组的输出功率稳定在额定值附近[1]。针对传统PID控制技术难以在大惯性、强耦合的风力发电机组中取得较好控制效果,国内、外学者提出将智能控制技术应用到变桨控制中[2-3]。其中,滑模控制[4]、神经网络控制[5]、自适应控制[6]、模糊控制[7-11]等智能控制算法逐渐被应用到变桨控制中,且取得了较好地控制效果。文献[4]中提出了一种改进的滑模变桨控制策略,采用基于支持向量机的趋近律减弱了滑模控制中的抖振,在该控制策略下,风力发电机组输出的功率稳定且抗干扰能力较强。文献[6]中提出了一种改进型的自适应BP神经网络,在神经网络反向传播调整连接权值时,不同的连接权处采用不同的学习率进行寻优,进一步提高了系统的误差收敛速度,控制效果较好。文献[7-10]中提出了模糊自适应PID控制的方法,通过功率误差及其变化率实时调整PID控制器参数的数值,提高了系统的响应特性,且输出的功率更加平稳。文献[11]中将模糊控制与PID控制相结合,同时利用模糊控制的鲁棒性、快速性以及PID控制的精确性,当功率误差较大时采用模糊控制,当功率误差较小时采用PID控制,具有较好地控制效果。文献[12]中在模糊控制与PID控制切换的过程中,运用了一种软开关的方式,使模糊控制与PID控制平稳过渡,有效减少了控制器切换对系统产生的影响。文献[14]中提出了一种变论域的模糊控制方法,通过变论域的方式改变模糊控制器输入、输出论域的范围,在模糊控制规则数量不变的情况下,提高了模糊控制精度。文献[15]中将转矩误差及其变化率作为桨距角模糊控制器的输入,实现了转矩和变桨控制的解耦,同时给出了一种功率平均值限制算法,可抑制阵风带来的转速过大和功率损失。
本文提出了一种风速前馈的模糊PID变桨控制策略,采用了一种平滑函数作为模糊控制与PID控制切换的依据。该方法在功率误差较大时利用模糊控制的快速性提高了系统的响应,在功率误差较小时利用PID控制器的精确性弥补了模糊控制稳定时存在静差的问题;通过Matlab仿真表明,该方法减少了控制器切换对系统造成的影响,用风速前馈的方式实时补偿桨距角度,提高了系统的响应性。
1 风力发电机组建模
1.1 风轮模型
由空气动力学可知,风力发电机组捕获的风能为[2-3]
(1)
式中:Pw为风力发电机组吸收的风能;ρ为空气密度;Ar为风轮面积;λ为叶尖速比;β为桨距角;v为风速;Cp为风能利用系数,
(2)
是λ和β的函数,根据贝兹理论,其理论极限为0.593。
1.2 传动系统建模
在永磁同步风力发电机组中,发电机转子的转速和风轮的转速相同,可得到如下简化的传动链方程:
(3)
式中:Tm为风轮的机械转矩;Te为发电机电磁转矩;J为风力发电机组的转动惯量。
1.3 永磁同步风力发电机建模
忽略发电机磁路饱和、涡流、磁滞损耗以及温度环境等因素影响,假设磁场沿气隙圆周呈正弦分布,永磁同步电动机d/q轴模型如下[3-4,7,11]:
(4)
式中:ud和uq分别为d,q轴电压;id和iq分别为d,q轴电流;Ld和Lq分别为d,q轴电感;Rs为定子电阻;φ为永磁体磁通;ωe为转子电角速度。
假设定子d,q轴电感相等,永磁同步风力发电机的电磁转矩为
Te=1.5Npiqφ
(5)
式中,Np为发电机极对数。
1.4 变桨执行机构建模
目前,兆瓦级别风力发电机组大多采用液压和电动的变桨执行机构,可将变桨执行机构的简化为
(6)
式中:τβ为时间常数;βc为给定桨距角;β为实际桨距角。
将式(6)进行拉氏变换,可得
(7)
式中:s为复频率。
2 控制器设计
本文研究的风速模糊前馈与模糊PID平滑切换的控制策略框图如图1所示。图中,P,P*为风力发电机组实际功率和额定功率;e为功率误差;Δv为当前时刻风速与前一时刻风速的差;β1为模糊PID控制器输出桨距角;β2为风速前馈桨距角;β3为最终输入到变桨执行机构的角度,为β1与β2的数值和。

图1 系统控制结构图
通过误差阈值切换模糊控制器与PID控制器是常用的一种方式。当误差大于设定的阈值时,采用模糊控制器对系统进行控制;当误差小于设定阈值时,采用PID控制器。这种控制方式在切换点处可能会因输出的桨距角不连续而导致系统不稳定,因此,本文采用了一种软开关的控制方式,在模糊控制器与PID控制器切换的过程中增加一个过渡区域,并引入合适的平滑因子,使系统在模糊控制器与PID控制器切换时平稳运行;同时,通过风速前馈模糊控制器,根据测量得到的风速给出合适的前馈桨距角,对于惯性大的风力发电机组,合适的前馈桨距角可有效提高系统的响应速度。
2.1 模糊控制器
将误差e和误差变化率eC作为二维模糊控制器的输入,控制量βFC为模糊控制器输出的桨距角。e,eC和βFC的模糊子集设定为{负大(NB), 负中(NM), 负小 (NS), 零(ZO),正小(PS), 正中(PM), 正大(PB)}。根据变桨功率控制要求,功率偏差小于额定功率的10%,即±200 kW,控制量的基本论域为[-6°,6°],故输入量e的量化因子Ke=0.03,误差变化率的量化因子KeC=0.015,使得控制器输入和输出变量的物理论域都为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。
为保证功率输出的平稳性,可采用平滑的高斯型隶属函数,模糊控制规则如表1所示。

表1 模糊控制规则表
清晰化常用的方法有最大隶属度法、中位数法和重心法3种[2]。其中,最大隶属度法取对应输出模糊集中隶属度值最大的论域中的值作为输出,当最大隶属度对应一个或多个论域值时,取算术平均值为输出;中位数法是从已知的模糊子集中求得对应的隶属函数曲线,并求出隶属函数与横坐标围成的面积,将所得面积除以2,该方法考虑了各点的情况,但计算较为复杂;重心法也即加权平均法,它涵盖和利用了模糊集合的所有信息,不仅有公式可寻,且理论上较合理,故本文选用重心法来去模糊。
2.2 PID控制器
PID控制器作为最常用的控制器,具有简单、可靠的特性。常见的PID控制器有位置式PID和增量式PID。本文采用增量式PID,控制器输出为
(8)
式中:kP为比例系数;kI为积分系数;kD为微分系数;T为采样周期;k为采样序号,k=1,2,…;e(k-1)和e(k)分别为第k-1和第k时刻的偏差信号;第k和第k-1时刻控制器的输出差值为
Δu(k)=kP[e(k)-e(k-1)]+kIe(k)+
kD[e(k)-2e(k-1)+e(k-2)]
(9)
一般情况下,PI控制器即可满足控制要求,故式(9)可简写为
Δu(k)=kP[e(k)-e(k-1)]+kIe(k)
(10)
根据式(10)在Matlab/Simulink中搭建增量式PID控制模型如图2所示。
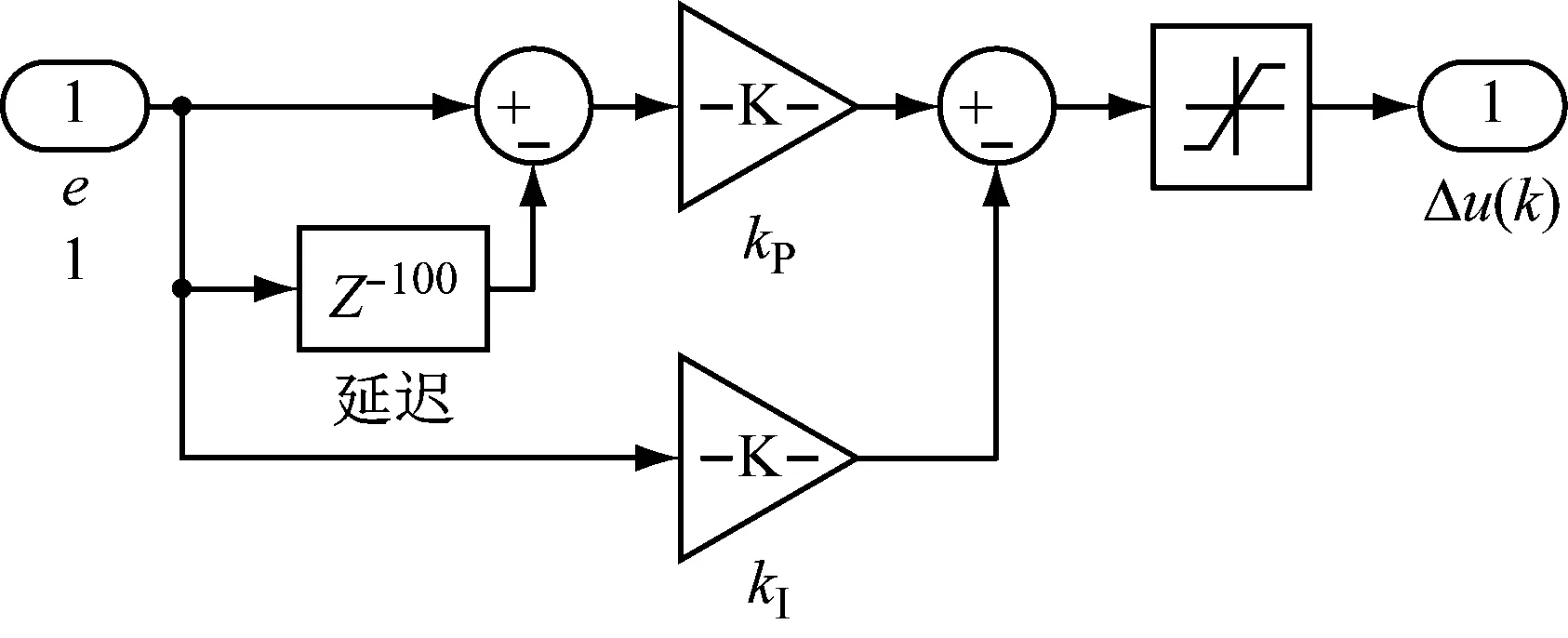
图2 增量式PI控制结构图
在整个系统中,采用离散的计算方式,离散时间为1 ms,故在图2中,延时环节的延长时间为100 ms。其中,kP=22×10-7,kI=13×10-6。
2.3 平滑函数设计
模糊PID平滑切换控制器的输出为
β1=θβFC+(1-θ)βPID
(11)
式中:β1为模糊平滑切换控制器的输出;βPID为PID控制器的输出;θ为平滑因子。
根据不同场合的不同需要,可选择合适的θ,其函数模型为
(12)
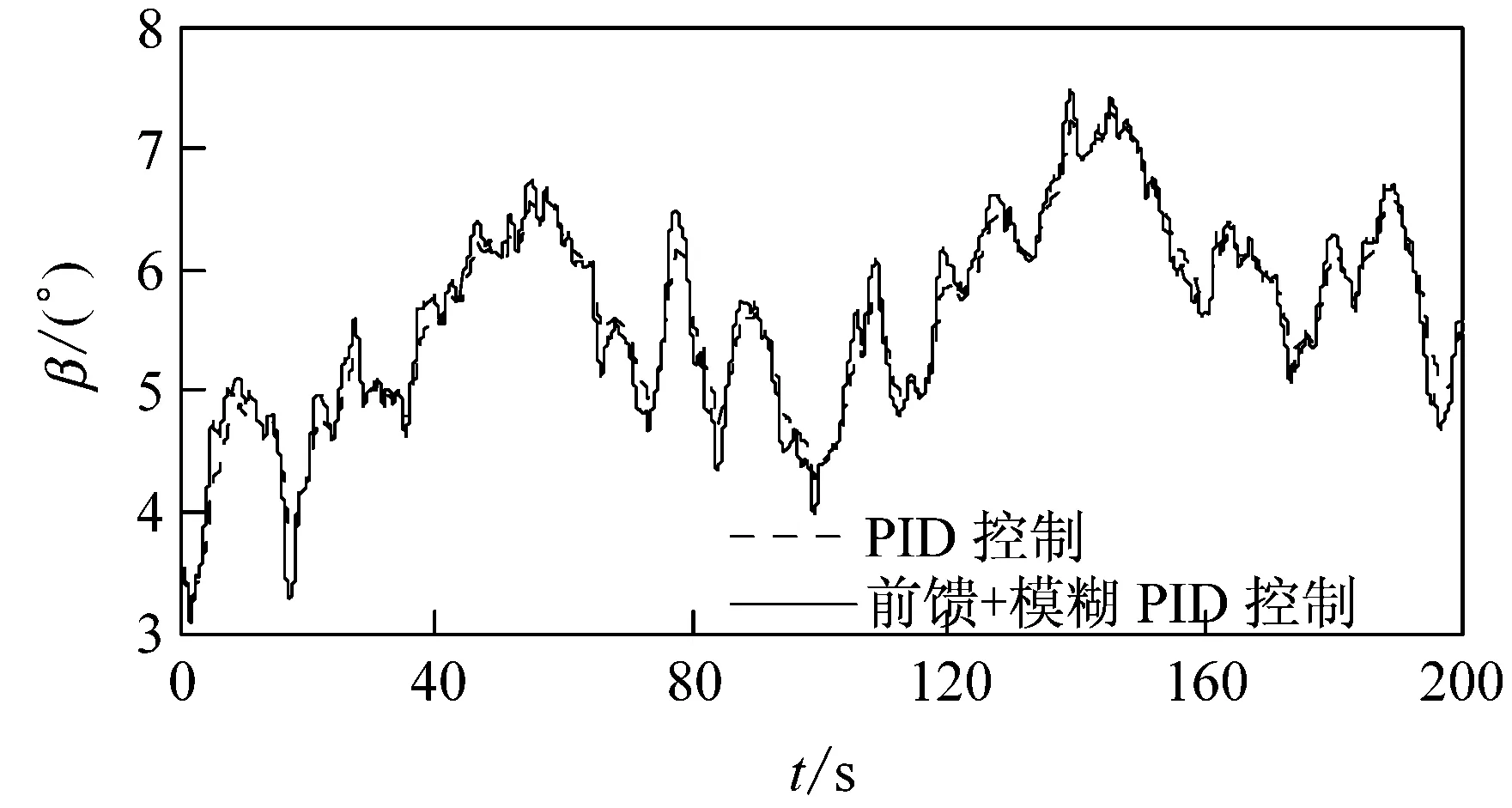
式中:x1和x2为临界点;δ为波形系数。当|e| 图3所示为平滑因子θ曲线图。由图3可见,当δ越小时,在过渡区域中,随着e增大,θ迅速变大,模糊控制器起主要作用;当δ越大时,在过渡区域中,随着e增大θ缓慢增大,PID控制起主要作用,当e足够大时,模糊控制器迅速起着主要作用。 经过多次实验后,取过渡区域为[0.35,2],e的量化因子为2×10-4,δ=-10。e折算后,当e<0.35时,PID控制起全部作用;当e>2时,模糊控制起全部作用;当e介于0.35~2时,PID控制器和模糊控制器共同作用,且对应的平滑因子θ随e的改变而改变。 图3 平滑切换因子曲线图 风力发电机组是一个大惯性、非线性的系统,且变桨机构的执行需要一定时间,故采用了风速前馈方式以提高系统的响应速度。 通过机舱顶部的风速仪[11]可以测到实际风速v,然后根据不同时刻的风速v(k)给出合适的桨距角前馈值β2,并与模糊PID控制器的输出β1相加,作为最终的桨距角输出β3。 该前馈模糊控制器有前一时刻的风速v(k-1)和当前时刻与前一时刻风速的差值Δv2个输入量,与前馈桨距角β21个输出量。 风速的基本论域为[13 m/s,25 m/s],模糊论域为{1,2,3,4,5}。对应的模糊子集有稍高(little high)、较高(relative high)、高(high)、很高(very high)、非常高(extremely high),分别简写为{LH,RH,H,VH,EH}。风速的增量Δv的基本论域为[-3 m/s,3 m/s],其对应的模糊论域为{-3,-2,-1,0,1,2,3},模糊子集为{NB,NM,NS,ZO,PS,PM,PB}。表2所示为模糊前馈规则表。 表2 模糊前馈控制规则表 桨距角的增量变化范围为[-4°,4°],为达到较精确的控制效果,输出量的模糊子集和模糊论域分别为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}和{NB2,NB1,NM2,NM1,NS2,NS1,ZO,PS1, PS2,PM1,PM2,PB1,PB2}。模糊前馈控制器的输入、输出隶属函数均采用简单的三角隶属函数,去模糊化方法采用重心法。 为验证风速前馈的模糊PID变桨控制策略的有效性,在Matlab/Simulink中搭建了2 MW永磁同步风力发电机组模型,并建立风速前馈与模糊PID控制结合的变桨控制器,将仿真结果与传统PID变桨控制策略做了比较。2 MW永磁同步风力发电机组的具体参数如表3所示。 表3 2 MW风力发电机组参数 仿真采用风速测量仪测量实际的200 s内的风速,其风速曲线如图4所示。 图4 200 s风速曲线图 将测量的200 s内的风速信号作为风力发电机组模型中的输入,在风速前馈与模糊PID控制结合的变桨控制器与传统的PID变桨控制器的分别控制下,风力发电机组的桨距角与功率变化如图5所示。 (a)桨距角 (b)功率 由图5(a)可见,当风速在额定风速以上时,风力发电机组通过风速前馈与模糊PID控制策略能够平滑地切换模糊控制器与PID控制器,并使输出桨距角连续;且风速前馈与模糊PID结合的变桨控制器输出的桨距角幅度大于传统PID变桨控制器。由图5(b)可见,由于图5(a)中各控制器输出的桨距角不同,风力发电机组输出的功率也有较大差别。风速前馈与模糊PID结合的变桨控制策略相对与传统PID控制而言,风力发电机组输出的功率波形幅度更小,功率更加平稳,因而具有更好的控制效果。 图6为200 s内风速经前馈模糊控制器后输出的桨距角补偿角度变化图,它是由测量的风速作为前馈模糊控制器的输入,根据前一时刻的风速及风速的变化所给出的合适的前馈桨距角度。 尽管图6中的前馈桨距角的幅值较小,但是,风轮的气动转矩对桨距角的灵敏性在高风速时远大于低风速,桨距角的细微变化对风轮转矩都会产生较大的影响[11]。将该控制器输出的前馈桨距角作为模糊控制与PID控制结合的控制器输出桨距角的补偿角度,对于大惯性、强耦合的风力发电机组而言能提高系统的响应特性。 图6 200 s内前馈桨距角曲线图 本文提出了一种风速前馈与模糊PID结合的变桨控制策略。为维持风力发电机组输出功率的稳定性,在功率误差较大时采用模糊控制器,在功率误差较小时采用PID控制器。该控制策略同时利用了模糊控制器的快速性和PID控制的精确性的特点,且在模糊控制器与PID控制器切换时采用软开关的形式。通过采用平滑函数,依据功率误差的大小实时调整模糊控制器与PID控制器输出所占比重,避免了控制器直接切换造成的输出不连续问题,有效维持了系统输出的稳定性。同时通过测量的风速实时进行桨距角的前馈调节,可以根据风速的特性给出合适的前馈桨距角,提高系统的响应特性。 [1] 窦真兰,程孟增,蔡旭,等. 大型风机变桨距控制系统的研究 [J]. 电机与控制应用,2011,38(3):38-44. [2] 陈世超. 风力发电机变桨距控制技术研究 [D].北京:北方工业大学,2016:2-4. [3] 罗佳宝. 基于模糊PID算法的风电机组变桨距控制器设计 [D].长春:长春工业大学,2015:20-21. [4] WANG Xin, ZHU Wanli, QIN Bin,et al. Chattering free sliding mode pitch control of PMSG wind turbine [J]. IFAC Proceedings Volumes,2014, 47(3):6758-6763. [5] SUYANTO, SOEDIBYO, FIRDAUS A A. Design and simulation of neural network predictive controller pitch-angle in permanent magnetic synchronous generator wind turbine variable pitch system [C]//2014 1st International Conference on Information Technology, Computer and Electrical Engineering. Semarang, Indonesia: IEEE, 2015:346-350. [6] 付光杰,胡明哲. 基于改进型学习率自适应BP神经网络的风力发电变桨距控制技术 [J].自动化与仪器仪表,2016(6):8-10. [7] 韦徵,陈冉,陈家伟,等. 基于功率变化和模糊控制的风力发电机组变速变桨距控制 [J]. 中国电机工程学报, 2011,31(17):121-126. [8] IBRAHIM I N, AKKAD M A A. Exploiting an intelligent fuzzy-PID system in nonlinear aircraft pitch control [C]// International Siberian Conference on Control and Communications. Moscow, Russia:IEEE, 2016:1-7. [9] YU Huiqun, GAO Yang, ZHANG Hao. Fuzzy self-adaptive PID control of the variable speed constant frequency variable-pitch wind turbine system [C]//IEEE International Conference on System Science and Engineering.Shanghai,China: IEEE, 2014:124-127. [10] 赵正黎,于惠钧,张发明,等. 基于模糊PID控制的风电机组变桨距控制技术研究 [J]. 湖南工业大学学报, 2015,29(6):43-48. [11] 郭鹏. 模糊前馈与模糊PID结合的风力发电机组变桨距控制 [J]. 中国电机工程学报, 2010, 30(8): 123-128. [12] 牛志刚,张建民. 应用于直线电机的平滑切换模糊PID控制方法 [J]. 中国电机工程学报, 2006, 26(8): 132-136. [13] LASHEEN A, ELSHAFEI A L. Fuzzy predictive control of the collective pitch in large wind turbines[C]//2015 European Control Conference. Linz, Austria:IEEE, 2015:1528-1533. [14] VAN T L, NGUYEN T H, LEE D C. Advanced pitch angle control based on fuzzy logic for variable-speed wind turbine systems [J]. IEEE Transactions on Energy Conversion, 2015, 30(2):578-587. [15] 蒋说东,刘军. 额定风速附近变速变桨风力发电机组功率优化控制 [J]. 太阳能学报,2015,36(5):1097-1104.
2.4 模糊控制器

3 仿真与分析




4 结 语
