基于电子航道图的长江上游山区航道助航技术研究与应用
2018-03-15段原昌
段原昌
(长江泸州航道局,泸州 646000)
长江上游地区资源丰富,蕴藏着投资与开发的巨大潜力,是长江经济带建设的重点区域之一。充分发挥长江上游山区航道航运潜力,是实现长江经济带发展战略目标的迫切需要。长江上游山区航道日益繁忙,船舶流量明显增大,航道水位变动频繁、涨落幅度大,雾情复杂,受限的控制河段多,导致在航船舶对航道助航服务要求高。因此,解决长江上游山区航道助航服务的关键技术,建立航道助航综合服务系统,引导船舶高效安全航行具有重要现实意义。
2013年,长江航道局建成了长江干线电子航道图系统,把各类用户关心的航道动态信息集成到电子航道图上,从而形成一个为长江水运各支持保障单位、港航企业与从业人员、航行船舶提供服务的公共性、基础性数据平台。面向营运船舶的电子航道图导助航服务是长江干线电子航道图系统3.0版新增的业务形式[1]。依托电子航道图船舶终端为船舶用户提供形象、直观、高效、精确的导航、助航功能和便捷的通信功能,并通过网络,对船舶终端上的电子航道图自动更新。在基于长江电子航道图助航服务研究中,彭文等研究了水深要素、航标要素和其他要素的更新方法、数据处理算法,构建各类航道要素的更新模型;李学祥等利用长江在航营运船舶终端数据,提出了测深电子航道图要素信息技术方案;吴关胜等针对双控制河段缺乏有效船舶通行指挥方法的现状,结合长江电子航道系统设计了一种基于智能控制算法的双控制河段船舶通行指挥系统[2]。钟丽等针对内河山区航道雾情多发,提出了一种基于图像分析的能见度评估算法[3];李莉等针对长江电子航道图应用服务需求,提出了基于Web Service技术的长江电子航道图信息集成助航服务体系建设方案。从上述文献可以看出,航道要素采集、计算建模以及集成应用是长江电子航道图系统助航的关键。为此,本文在研究长江上游山区航道水位预测、能见度探测、控制河段交通状态感知等关键技术基础上,开展基于长江电子航道图的山区航道助航服务集成应用系统,为提升长江上游山区航道助航服务水平提供技术支撑[4]。
1 长江山区天然航道水位预测方法
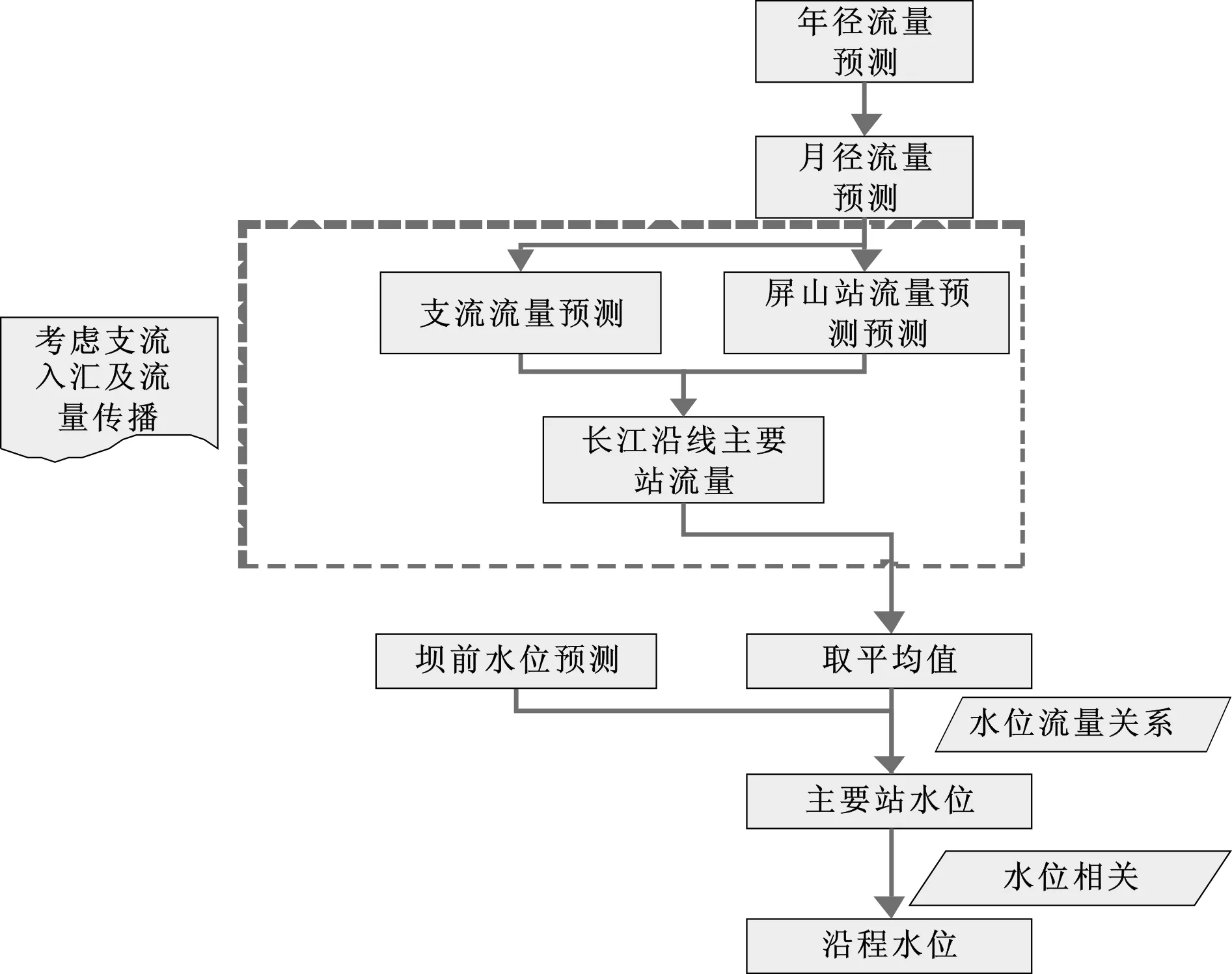
图1 长江上游水位短期预测流程Fig.1 Short term prediction process of water level in the upstream of the Yangtze River
水位是内河电子航道图基本要素之一,提供长江山区航道沿程实时准确的水位信息是长江电子航道图助航服务的基础。目前,预报方法主要有物理成因分析法、数理统计法、智能方法和综合预报法四大类。物理成因分析法主要是利用大气等宏观因子进行中长期水文预报,虽然方法可信度较高,但实施难度较大。而智能方法主要用于年径流、洪水的预报,且模型建立时间较长,收集资料(降雨、大气、流域情况等)较多,难以短时间实施。综合预报法主要用于天气预报,对具体站来流预测很少涉及。因此,根据上游流量变化的特点,采用移动平均法对流量进行预测。上游水位短期预测的思路(图1)为:首先对年径流量进行预测,了解是丰水年还是枯水年。在预测年径流量的基础上,根据统计规律对月径流量进行分配。其次,采用移动平均法对水位站、支流控制站进行预测,并采用合流法、考虑流量传播特性,对主要站进行流量预测。最后,按水位流量关系,对主要站进行水位预测,并通过相关关系对长江上游沿线主要水位进行预测。
1.1 流量预测方法
(1)进口流量预测方法
采用预测学中的移动平均法。设时间序列y1,y2,…,yn,按数据点的顺序逐点推移求出N个数的平均数,即可得到一次移动平均数
Mt(1)=(y1+yt-1+…+yt-N-1)/N=Mt-1(1)+(yt+1-yt-N)/N
(1)
式中:Mt(1)为第t周期的一次移动平均数;y1为第t周期的观测值;N为移动平均的项数。金沙江屏山站、及主要支流岷江高场站、横江站、沱江富顺站、嘉陵江北碚站、乌江武隆站等用此方法预测。
(2)汇合流量预测方法
两江汇合后,受两江来流的影响,其流量为主流和支流之和,但要考虑主流及支流的传播时间。
Q=Q主流t1+Q支流t2
(2)
式中:传播时间t=L/V,L为预测水尺之间的距离,m;V为传播速度,m/s。
1.2 寸滩站水位预测算例
寸滩位于三峡大坝变动回水区,该站的水位不仅受上游来流的影响,还受到三峡大坝坝前水位的影响,因三峡从2008年开始175 m试验性蓄水,所以选取2008~2011年的水文资料。分以下几种情况进行讨论:
(1)当坝前水位小于等于158 m时,坝前水位对寸滩站水位流量过程影响较小,所以可以以上游来流为参数直接点绘该站的水位流量关系(图2)。
(2)当坝前水位大于158 m,且流量大于15 000 m3/s时,寸滩水位主要受流量影响,因此,可以用寸滩流量为参数,建立寸滩水位和寸滩流量之间的关系(表1)。
(3)当坝前水位大于158 m,且流量小于15 000 m3/s时,寸滩水位主要受坝前水位影响,因此,建立寸滩水位和坝前水位之间的关系(图2)。
(4)当坝前水位大于163 m,且流量小于等于8 000 m3/s时,坝前水位对寸滩站的影响占主要地位,寸滩水位与坝前水位之差较小,最大为0.54 m,所以此时,可以近似的认为寸滩水位等于坝前水位。

图2 寸滩站水位流量关系曲线Fig.2 Relation curve of water level and discharge at Cuntan station
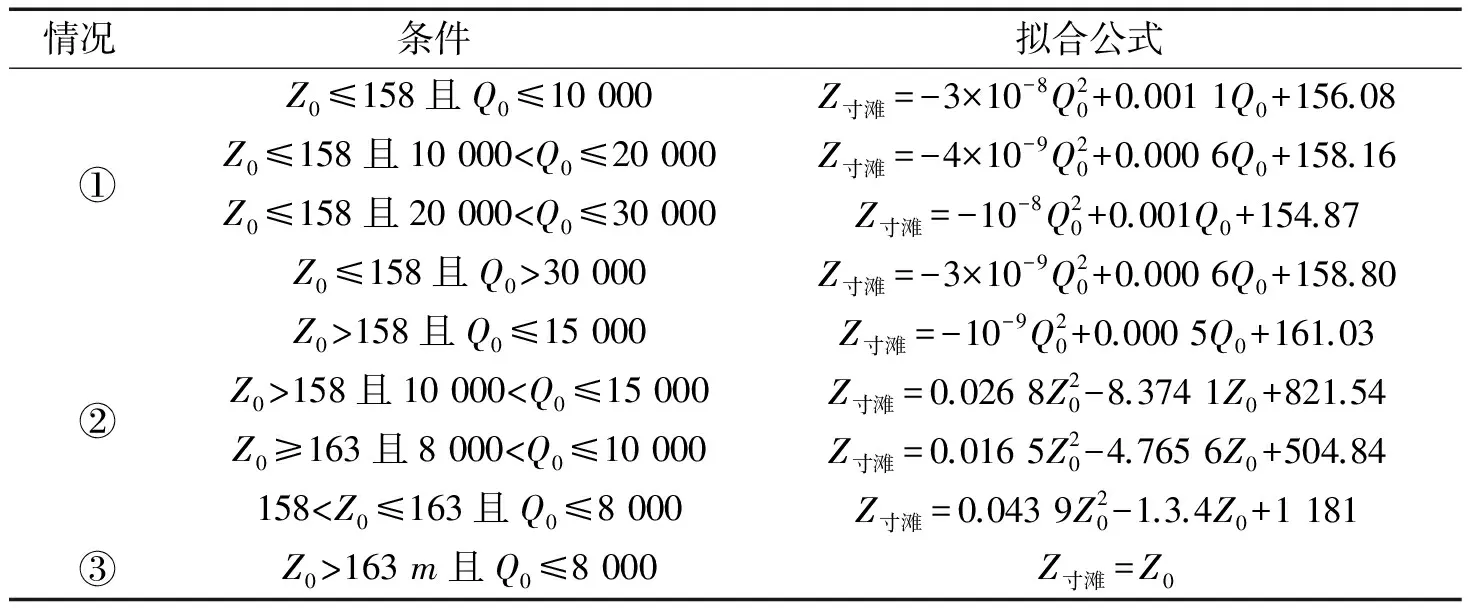
情况条件拟合公式①Z0≤158且Q0≤10000Z寸滩=-3×10-8Q20+0.0011Q0+156.08Z0≤158且10000
备注:Z寸滩为寸滩水位,m;Z0为坝前水位,m;Q0为寸滩流量,m3/s。
由图3可知,经验公式与实测数据拟合较好,具体的公式见表1。表2为寸滩站2013年2月10日、2013年5月10日、2013年8月17日、2013年9月19日、及2013年11月18日预测水位值与实测值之间的对比,最小差0.14 m,最大差0.72 m,枯期精度较高,洪水期精度稍差。

图3 寸滩水位与坝前水位之差(Z0≥163 m 且 Q0<8 000 m3/s)Fig.3 Difference between the Cuntan water level and the dam front water level of Three Gorges (Z0≥163 m and Q0<8 000 m3/s))
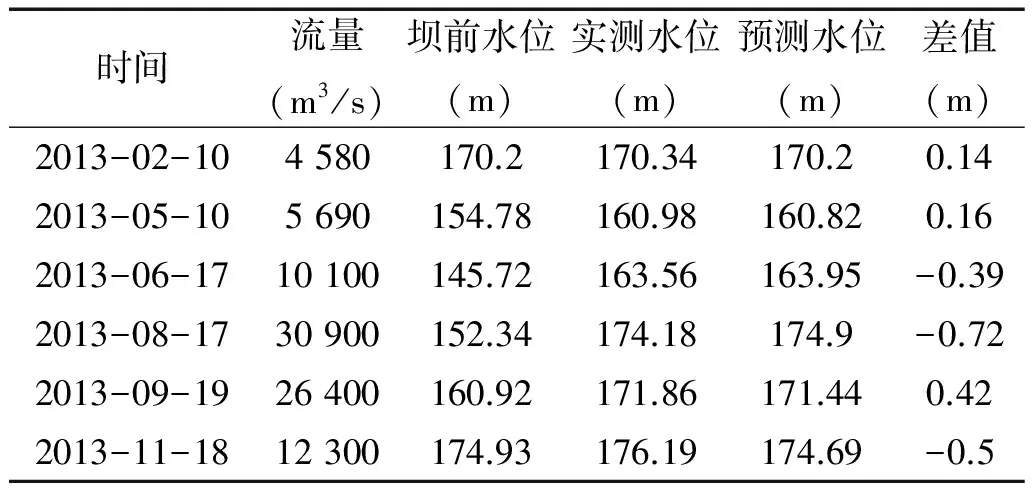
时间流量(m3/s)坝前水位(m)实测水位(m)预测水位(m)差值(m)2013-02-104580170.2170.34170.20.142013-05-105690154.78160.98160.820.162013-06-1710100145.72163.56163.95-0.392013-08-1730900152.34174.18174.9-0.722013-09-1926400160.92171.86171.440.422013-11-1812300174.93176.19174.69-0.5
2 长江山区航道能见度自动监测技术
长江山区航道地处亚热带季风气候,地形比较复杂,相对高差大,气候垂直变化显著,气候有冬暖、春旱、夏热、伏旱、秋雨及全年光照少、云雾多、霜雪少的特点。尤其是云雾多这个特点给长江山区航运安全带来了很大影响。因此建设长江山区航道能见度监测系统,并实现长江山区航道能见度信息的实时、准确数字化采集、处理与服务,便可依托长江电子航道图服务,为各类用户提供实时、精细化的能见度信息,航行船舶可以充分利用这些实时可靠的信息,高效引导船舶安全航行。航道能见度信息采集需要解决能见度仪的布设以及数据采集软件设计等问题。
2.1 能见度自动监测站布设

图4 长寿航道码头自动雾情监测站Fig.4 The automatic fog monitoring station of the Changshou waterway wharf
考虑设备的布设条件及维护的便利性,本文选择长江长寿段航道作为试点,在骑马桥、小石溪、羊角堡、莲子碛、瓦罐窑、黄草峡雾情观测站和长寿区航道码头7处建立能见度自动监测站点。七个站点全部分布在涪陵航道管理处辖区内,其中,骑马桥、小石溪、长寿区航道码头分布在长寿水道,羊角堡、莲子碛、瓦罐窑、黄草峡分布在黄草峡水道。其中骑马桥、小石溪、羊角堡、黄草峡站点设置在信号站,有人值守,而莲子碛、瓦罐窑两个站点为无人值守站点。自动监测站选用四种不同厂家的能见度检测设备,均为在道路及机场环境中使用较为成熟的前向反馈式能见度监测仪,各站点设置了供电子系统(部分采用太阳能及风能供电),采用基于3G的无线通讯方式将实时能见度数据向数据中心服务器传送。其中长寿航道码头自动雾情监测站布设如图4所示,包括能见度仪、供电系统以及数据采集系统等。
2.2 能见度监测软件系统设计
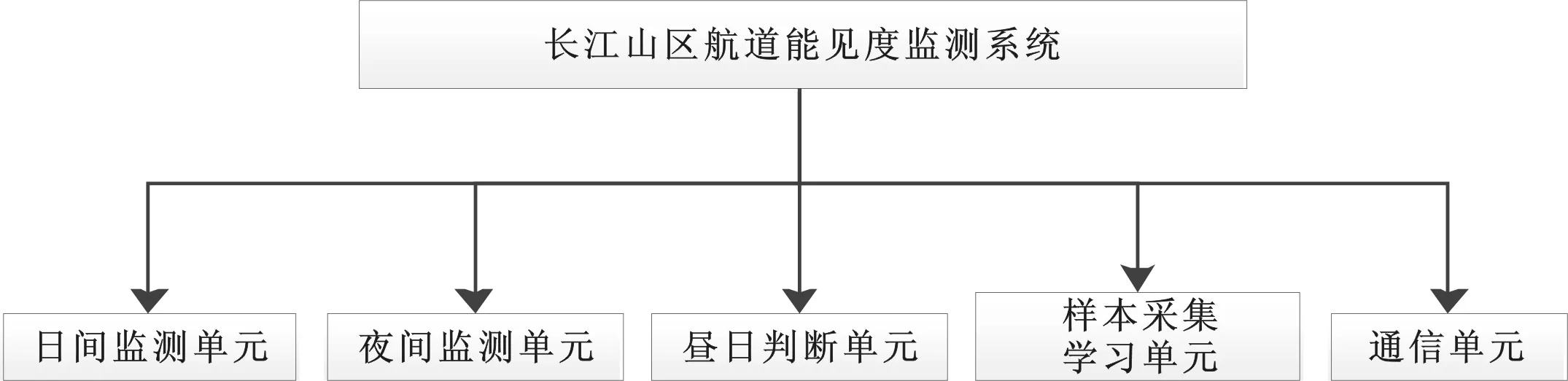
图5 长江山区航道能见度监测系统的组成Fig.5 Composition of visibility monitoring system in mountainous waterway of Yangtze River
能见度监测软件系统包括:采集及保存单元、评价单元、报警单元以及通信单元等部分,如图5所示。该软件系统计算周期为1 min,采用较短的计算周期可以发现雾情的脉动趋势,及时发现雾情的增消。雾情变化信息通过网络通信的方式及时发布给长江航道监控中心,为长江航道航行安全提供实时预警信息。
2.3 能见度自动监测站有效性分析
为检验自动能见度监测站能见度采集的有效性,本文收集了有人值守长江航道信号站(包括骑马桥、小石溪、羊角堡、黄草峡站点)的近半年的人工雾情记录。同时整理的能见度自动采集系统对应的雾情数据,对各自动能见度监测站点进行对比分析,结果见表3和表4。
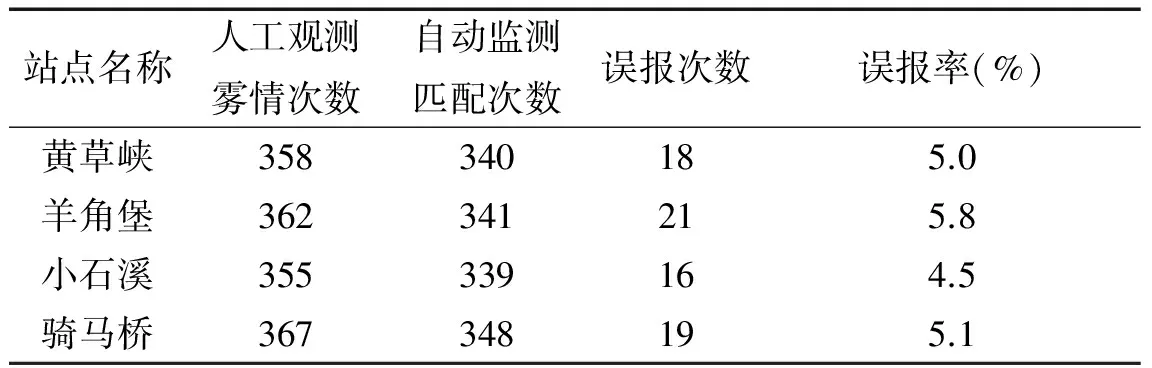
表3 长寿段雾情监测误报率分析2015-09-23~2016-03-22Tab.3 2015-09-23~2016-03-22 false alarm rate analysis of fog monitoring in the Changshou waterway

表4 月长寿段雾情监测系统漏报率分析2015-09-23~2016-03-22Tab.4 2015-09-23~2016-03-22 missing report rate analysis of fog monitoring system in the Changshou waterway
通过上述统计数据可以看出4套能见度监测系统的误报率均小于10%,而实际测量值与人工观察值在趋势上较为接近,每次漏报的能见度监测值与人工测量值能见度小于200 m,能见度监测基本能满足能见度预警的要求。漏报率方面,羊角堡、小石溪、骑马桥都具有良好表现,而黄草峡的漏报率较高,经进一步分析调查发现,该站点设置处受地形和人类活动的影响,容易产生误报。
3 控制河段航道通航信息集成系统设计技术
长江上游山区航道控制河段水位变化剧烈,航道狭长,AIS信号可靠性较低。因此,实时获取精确的航道通航环境信息对于控制河段船舶通行指挥非常必要。因此本文设计了控制河段航道通航信息感知系统。整个系统由监控服务器、航标遥测遥控终端、水深遥测遥报终端、AIS船台、雷达系统、CCTV系统以及通信系统组成。
监控服务器负责航标遥测遥控终端、水深遥测遥报终端、AIS船台等各种信息收集、雷达数据处理以及控制河段视频数据采集等;可通过图形化人机界面,监视、查询、分析设备运行信息;监控服务器的数据库能够实现系统与系统间的数据共享,并可以为上级监测系统提供航道设备运行信息。客户端可以通过网络查询、显示航标、航道、工作船舶等信息。智能航道监控平台负责整合监控服务器中的各种数据资源,包括航标数据、航道水深数据和船舶数据等。航标遥测遥控终端是航标的基础数据采集平台,负责采集、控制并发送航标设备的运行参数,执行监控服务器下达的遥控指令。水深遥测遥报终端负责采集并发送水深数据,执行监控服务器下达的遥控指令。通信系统由ZigBee岸基、AIS岸基以及光纤网络组成,负责传输航标运行参数及控制航标指令数据。本文采用ZigBee和有线网络等多种网络相结合的通信系统,充分发挥各通信网络优势,为整个系统提供一个运行安全、可靠、经济的通信系统。同时,根据安装的实际情况以及通信结构可以灵活改变,以满足内河航道狭窄、弯曲的特点。
除了硬件系统之外,本文设计了控制河段航道通行指挥软件系统。该系统具体功能包括:控制河段航道内船舶24 h动态监管、船舶进入上下指挥断面时提示报警、尚未进入上指挥断面的船舶误报船位监管、违章进漕船舶进行取证、通行指挥内容记录、控制河段航道内船舶流量统计、控制航道通行指挥多级监管。所有功能都以电子航道图/电子地图作为系统的显示平台,可综合显示航道相关基础数据信息等,并在此平台上整合其他应用子系统,如航标信息等。
4 基于电子航道图的长江山区航道助航技术集成应用
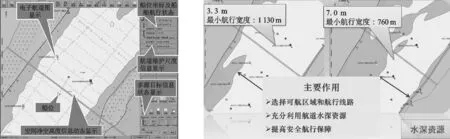
6-a 航道信息服务 6-b 航道助航服务

6-c 可视距离与流速区服务 6-d 导航服务图6 长江航道助导航集成应用系统Fig.6 Integrated navigation and navigation application system for the Yangtze River waterway
在解决了长江山区航道水位预测、能见度信息采集以及控制河段通航信息采集技术的基础上,为提高航道助航效率,本文开发了基于电子航道图的长江航道助航集成应用系统,实现了AIS信号接入、GPS信号接入、测深仪信号接入、数字雷达信息集成应用、航道图更新、网络服务检索、本船信息显示、电子航道图快速显示及显示方式选择、航道要素查询、计划维护水深显示、船舶定线制显示、安全航行预警、航线管理及轨迹回放、山区重点河段可视距离应用、控制河段通行信号集成应用、虚拟航标显示应用、手工标绘和日志记录、当日水位及未来7 d水位预测显示、不同水深航道显示、港区图显示、流速流向信息应用等功能。其中重要的导航功能如图6所示。
(1)安全航行预警。安全航行预警功能开启后,根据用户输入的安全报警距离,可对浅区、不良流态、桥梁净空高度、控制河段、逆向航行、穿越航道中线、接近(驶离)航道、穿越安全等深线、危险物避让、航标避让、船舶安全区、锚地、警戒区等进行报警,可为船舶安全航行提供参考。
(2)山区重点河段可视距离。山区重点河段可视距离应用能够显示山区可视距离观测站、观测数据以及数据发布时间;当船舶航行前方一定范围内的可视距离小于规定时,可提前向用户发出报警提示。
(3)控制河段通行信号集成应用。控制河段通行信号集成应用功能可通过网络服务查询各个控制河段通行信息;当船舶即将进入控制河段时,能够接收公共服务平台推送过来的通行信号。
5 结束语
长江上游山区航道通航环境复杂,船舶航行安全压力大。本文针对长江上游山区航道助航服务能力需求,开展了解决长江上游山区航道助航服务的技术与应用研究,取得的主要成果如下:
(1)建立了长江上游山区航道水位移动平均预测模型,实例证明该模型预测精度较好,可以满足电子航道图助航服务的基本要求;
(2)拟定了山区航道能见度采集传感器布设方案并提出信息采集管理方法,设计了控制河段航道助航信息采集系统。
(3)开发了基于电子航道图的长江山区航道助航集成应用系统,实现了山区航道安全航行与可视距离预警以及控制河段通行指挥等功能,提高了山区航道助航服务的水平。
在未来研究中,将探索基于“互联网+”的长江山区航道服务技术,推动长江智能航道技术的进步。
[1]石昕, 杨保岑, 彭文,等. 长江电子航道图系统建设方案设计[J]. 水运工程, 2012(4):196-199.
SHI X,YANG B C,PENG W,et al. Design of Changjiang ENC system[J].Port & Waterway Engineering, 2012(4):196-199.
[2]吴关胜. 双控制河段船舶通行指挥系统设计与实现[J]. 水道港口, 2016, 37(4):422-425.
WU G S. Design and implementation of ship traffic control system in double control waterway [J]. Journal of Waterway and Harbor, 2016, 37(4):422-425.
[3]钟丽, 吴关胜, 谢斌,等. 基于图像分析的航道能见度评估算法研究[J]. 交通科技, 2017(2):151-154.
ZHONG L,WU G S,XIE B ,et al. Research on channel visibility assessment algorithm based on image analysis [J]. Transportation Science& Technology, 2017(2):151-154.
[4]李莉, 何明宪, 翁玉,等. 基于WebService的长江电子航道图应用服务技术[J]. 水运工程, 2016(1):78-82.
LI L,HE M X,WENG Y,et al.Application of Changjiang electronic channel chart based on WebService technology [J].Port & Waterway Engineering, 2016(1):78-82.
