车载激光扫描数据分类支持下的路面数据提取
2018-03-07吴学群宁津生
吴学群,宁津生,杨 芳
(1. 武汉大学测绘学院,湖北 武汉 430079; 2. 昆明理工大学国土资源工程学院,云南 昆明 650093; 3. 昆明市测绘研究院,云南 昆明 650051)
在信息化时期,交通管理局、园林局、市政局、广告管理处等政府部门急需城市最新专题数据,进行城市管理辅助决策。已有的专题数据多采用全站仪、GNSS RTK等手段进行测绘,现场进行属性调查,然后内业成图入库。传统作业方式外业劳动强度大、效率低,无法满足城市专题数据的快速获取、更新。全景激光移动测量系统作为一种新的空间数据采集手段,在行驶过程中快速采集道路及两旁的城市地物三维点云、影像信息,满足沿道路两旁城市专题数据快速获取的需要。
近年来,国内外学者围绕三维激光点云数据的分类与提取进行了广泛的研究。由于机载扫描系统主要获取地物的顶面信息,而车载激光扫描系统主要获取地物的立面信息,因此,机载的数据分类方法不能直接在车载激光扫描系统中应用[1]。针对车载激光点云数据的特点,一些学者提出了相应的分类提取方法。在道路点云数据提取方面,文献[1]提出了一种基于投影点密度的分类方法;文献[2]将点云投影在水平格网中,通过判断格网内点云投影前的高度值判别地面点;文献[3]将点云投影在平面上,采用格网对平面进行分割,根据区域内点的密度差异,实现不同地物的判别与信息提取;文献[4]采用基于法向量的模糊聚类方法对路面点云进行分类提取;文献[5]对原始点云进行规则格网投影,根据格网中点云的分布特征生成点云特征图像,采用阈值分割、轮廓提取等方法实现点云的分类提取;文献[6]根据点云的平面、高程信息,通过点云与其邻域比较进行道路边线的提取;文献[7]对点云进行投影、格网分割,根据格网内点云的特征进行地物分类;文献[8]提取扫描线,采用移动窗口法依据扫描线上点云的高程、坡度差异、密度等特征提取路坎点;文献[9]利用点云的高程、反射强度信息进行滤波,结合标线的几何、语义信息提取道路标识线;文献[10]运用近似平面约束法、有序最小二乘坡度估计、多尺度窗口迭代获得路面初始种子点,在此基础上,通过局部邻域坡度方法提取高速公路路面点;文献[11]通过分析城市环境中道路与邻近区域点云的高程差异,结合区域生长等图像处理算法,提出了一种城市道路提取的方法;文献[12]依据扫描断面上数据点的空间分布特征,实现采集数据的分类。
本文通过渐进网格划分组合路面数据特征的方法,提取点云数据中的路面数据。根据各类地物点云数据的高程特征,设定高程阈值,滤除点云数据中建筑物的顶面及上半部分、树木及电杆的上半部分数据;构建格网,采用渐进格网的分类方法对剩余数据点进行分类,完成路面数据的提取。
1 数据预处理
1.1 原始数据处理
对车载激光扫描系统采集的原始数据进行POS解算、融合解算和预处理。其中,POS解算将基站数据和GPS数据转换成融合软件所支持的文件格式,并用对应的软件对POS数据进行解算,最后将其导出。融合解算将原始数据进行融合处理,生成相应格式的点云数据文件。预处理环节主要完成点云数据的去噪、与全景影像的配准、格式转换等工作。
1.2 数据的分割
车载激光扫描点云数据量大,道路存在坡度变化。若直接对整个扫描区域的数据进行处理,难以综合考虑坡度变化对分类效果的影响。因此,在进行点云数据分类前,利用系统顶部卫星定位模块采集的行车轨迹数据按高程变化趋势对点云数据进行分段,对每段点云数据进行路面数据提取,将结果合并获得整个测区的路面分类提取成果。由于实际测区环境不同,道路情况越复杂,分段数越多。
2 渐近格网划分与组合路面特征的方法
2.1 依据路面特征分类
城市道路存在坡度变化,但通过数据分段后,每段的道路高程变化较为平缓且连续。在扫描场景中,路面点云数据的高程通常低于道路两旁的树木、路灯、建筑物等上半部分点云数据的高程,因此,设定高程阈值可以剔除一部分道路两旁的非路面点。
由于地形存在高低起伏,道路的路面不会完全水平,在纵横方向上都存在一定的坡度,因此在设定高程阈值时,需要考虑道路坡度的影响。本文使用车顶GPS RTK定位模块的高程与定位模块至地面的高度之差作为高程阈值Hi,该阈值随路面的高程变化而变化,避免因为道路坡度及高程变化错误剔除路面点。高程阈值Hi确定后,与分段区点云数据的高程进行比较,若点云数据的高程值大于阈值,则判断为非路面点予以剔除;若低于阈值,则视为待定点,进行下一步判断。
2.2 基于渐进格网法的路面分类与提取
采用渐进格网的分类方法对以上得到的待定点进行路面点的分类与提取[13]:
(1) 格网划分。在分段区域的点云数据中,选取坐标的最大值Xmax、Ymax、Zmax与最小值Xmin、Ymin、Zmin。将区域内的点云数据投影到XOY平面上,根据式(1)进行M×N的格网划分,格网的间距为GSD,格网的间距应根据实际情况进行调整。
(1)
每个数据点所在的格网号为(i,j),其中
(2)
(2) 以格网为单元,计算点云数据间的高差。设定阈值,高差小于该阈值的点视为初始路面点。计算该格网内初始路面点的平均高程Ha,并将这些点与其余的点划分为待定点。
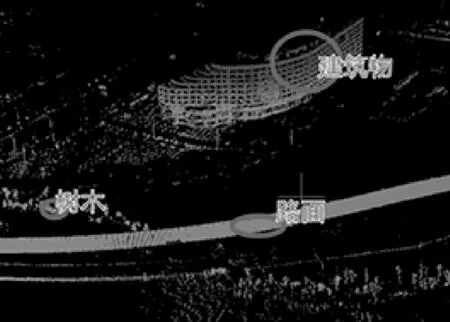
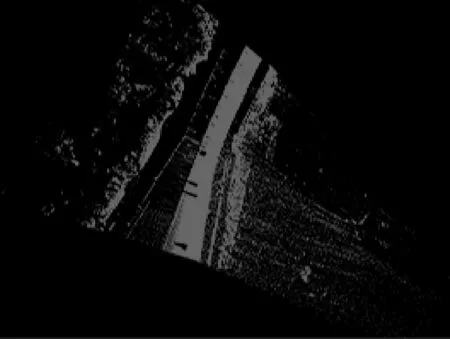
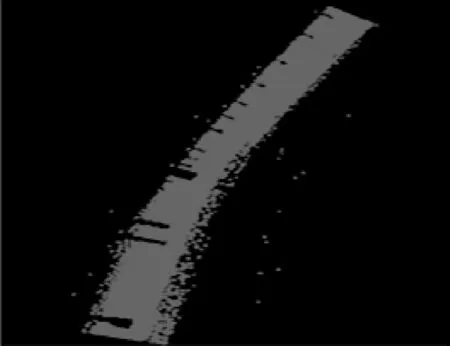
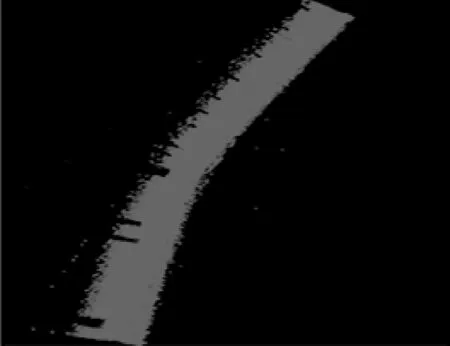
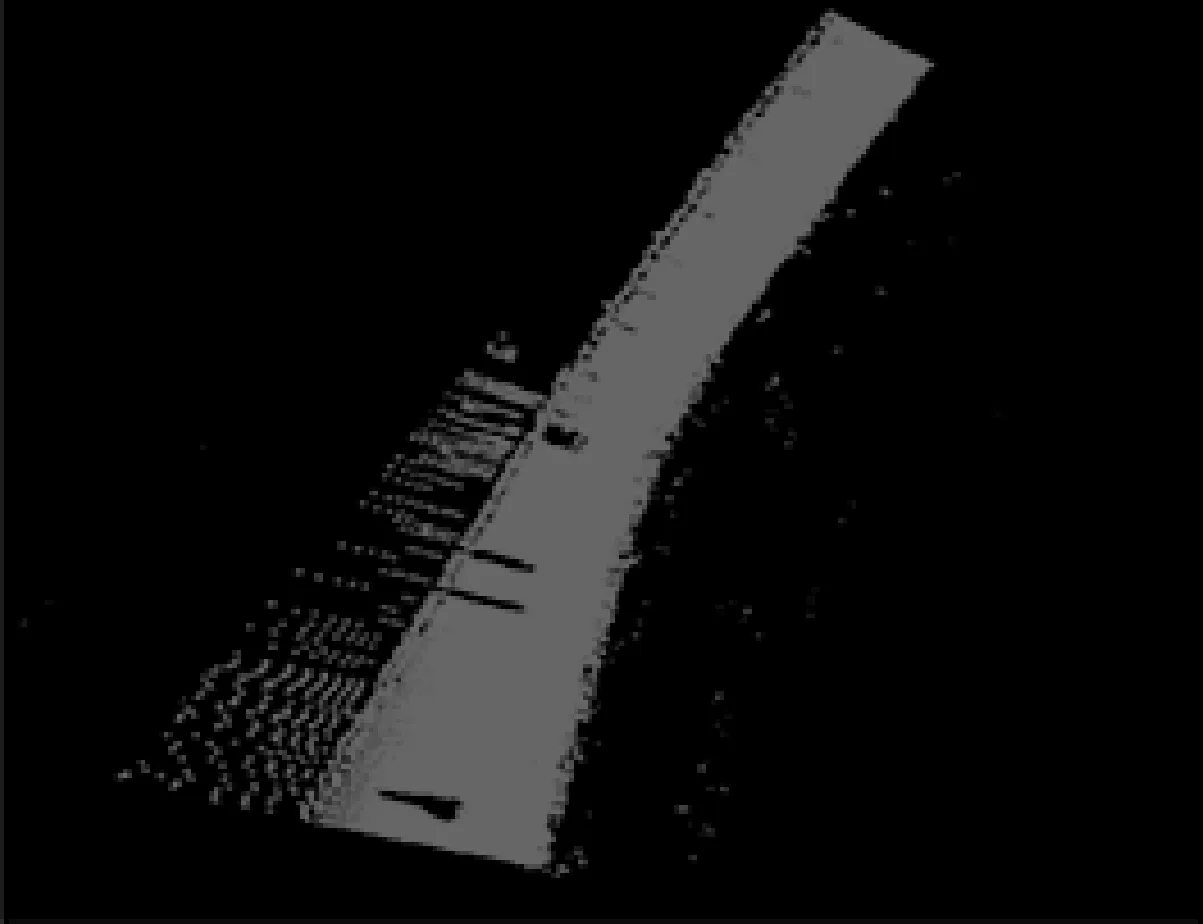
(3) 路面点分类提取。计算每个格网中待定点间的最大高差ΔHi,其中ΔHi=Hmax-Hmin,并设定阈值Hh(将测区内扫描地物的最小高度作为阈值)。如果格网中计算的高差ΔHi小于阈值Hh,且格网中最小的高程值与Ha之差小于阈值Ht(Ht根据系统获取的坡度和实际高程确定),即满足ΔHi 本文采用的路面分类流程如图1所示,在OpenGL环境下编程实现了上述算法。 图1 试验区为某市高速路段,测区卫星图如图2所示,数据存储格式为*.las,测区采集点云16 831 533个,数据类型有路面、树木、路灯、建筑物等,如图3所示。 图2 试验区卫星图 图3 试验区点云 整个测区的点云数据被分割为160个区域,选取区域1(如图4所示)进行路面的分类与提取试验,点云数据效果图如图5所示。 图4 区域1卫星图 本文所使用的全景激光移动测量系统的扫描中心距离地面约2.5 m,根据车顶GPS RTK定位模块的高程值与定位模块至地面的高度(2.0~2.5 m)设定高程阈值Hi,剔除高程较高的一部分非地面点。经过上述步骤的分类效果如图6所示。 图5 区域1原始点云 图6 高程阈值分类后的效果 在上述获取的待定点中利用格网渐进划分的方法提取路面数据,渐进调整格网间距GSD分别为1.2、1.0、0.8、0.5、0.2 m,分类效果如图7—图11所示。 图7 GSD=1.2 m 图8 GSD=1.0 m 由以上分类效果图可以看出,格网间距为1.2、1.0、0.8 m时,建筑物、树木、路灯等地物点被剔除的同时,许多路面点也被当作地物点剔除掉,路面保存不完整;格网间距为0.2 m时,路面点保留较为完好,但是道路两旁的地物点容易误分为地面点;格网间距为0.5 m时,出现误分的情况有所减少,同时能提取出对向路段的路面点,效果较好。 图9 GSD=0.8 m 图10 GSD=0.5 m 图11 GSD=0.2 m 采用上述方法对整个试验区原始点云数据(如图12所示)进行分类提取,分类的效果图如图13、图14所示,路面数据提取效果较好。 图12 试验区原始点云数据 图13 高程阈值分类后点云数据 图14 GSD=0.5 m时提取时路面数据 与机载扫描系统不同,车载激光扫描系统主要获取道路及两旁地物的立面信息,同时也会获取少量地物(如道路上的车辆、树冠、低矮建筑物等)的顶面信息,其点云数据在平面上的投影区域较小。本文结合路面点云数据的特征,采用渐进格网法进行了路面点云数据的分类提取研究,在试验区取得了较好的效果。采用渐进格网方法进行地面点分类时,格网间距的调节极为重要。在具体分类提取过程中,可以在路段中选择样本区域进行抽样试验,根据抽样路段实际情况(路面起伏、建筑物、车辆等立面信息)进行格网间距设置的优化。 [1] 史文中,李必军,李清泉.基于投影点密度的车载激光扫描距离图像分割方法[J].测绘学报,2003,34(2):95-100. [2] 吴芬芳,李清泉,熊卿.基于车载激光扫描数据的目标分类方法[J].测绘科学,2007,32(4):75-77. [3] 卢秀山,黄磊.基于激光扫描数据的建筑物信息网格化提取方法[J].武汉大学学报(信息科学版),2007,32(10):852-855. [4] 闫利,张毅.基于法向量模糊聚类的道路面点云数据滤波[J].武汉大学学报(信息科学版),2007,32(12):1119-1122. [5] 杨必胜,魏征,李清泉,等.面向车载激光扫描点云快速分类的点云特征图像生成方法[J].测绘学报,2010,39(5):540-545. [6] 王果,崔希民,袁德宝,等.车载激光点云邻域比较的道路边线提取方法[J].测绘通报,2012(9):55-57. [7] 谭贲,钟若飞,李芹.车载激光扫描数据的地物分类方法[J].遥感学报,2012,16(1):50-66. [8] 方莉娜,杨必胜.车载激光扫描数据的结构化道路自动提取方法[J].测绘学报,2013,42(2):260-267. [9] 李明辉,田冬雪,胡维强.基于车载三维激光扫描的道路线提取[J].测绘与空间地理信息,2014,37(4):118-121. [10] 刘如飞,田茂义,许君一.车载激光扫描数据中高速公路路面点滤波[J].武汉大学学报(信息科学版),2015,40(6):751-755. [11] 张达,李霖,李游.基于车载激光扫描的城市道路提取方法[J].测绘通报,2016(7):30-34. [12] MANANDHAR D,SHIBASAKI R.Vehicle-borne Laser Mapping system (VLMS)——A New Observation System for 3D Mapping of Urban Areas [C]∥Proceedings of the IEEE Joint Workshop on Remote Sensing and Data Fusion over Urban Areas.Rome,Italy:IEEE,2001:5-9. [13] 杨芳.基于车载三维激光扫描数据分类的路面提取研究[D].昆明:昆明理工大学,2016. [14] 张大坤,罗三明.形态学中闭运算功能的扩展及其应用[J].计算机工程与应用,2010,46(27):185-187. [15] 张小红.机载激光雷达测量技术理论与方法[M]:武汉:武汉大学出版社,2007. [16] 王果.不同平台激光点云数据面状信息自动提取研究[D].北京:中国矿业大学,2014.
3 试验分析
3.1 试验区概况


3.2 试验结果






4 结 语
