智能上肢假肢气动平衡机构的优化设计
2018-03-05樊炳辉宗亚伟高圣志
樊炳辉,宗亚伟,高圣志,王 凯
(山东科技大学 机器人研究中心,山东 青岛 266590)
1 引言
假肢是一种利用工程技术方法和手段,针对截肢者或肢体不完全缺损者而特别设计、制作和装配的人工假体。它的重要作用是弥补失去肢体的特定功能,使佩戴者恢复一定的生活自理和工作能力。其适用对象是因交通事故、工伤事故、疾病、运动创伤等原因造成的截肢者。按截肢部位假肢分为上肢假肢和下肢假肢。就上肢假肢而言,电动假肢为较常见上肢假肢,电动假肢为外动力式假肢,靠小型机电驱动系统来实现假肢各关节的预定动作,达到伤残者基本上能满足生活自理,以致参加适当的工作的目的。此种假肢适合于前臂甚至全臂缺损者使用。
新式电动假肢的驱动系统一般采用体积小、功率大的舵机,可以实现让假肢抓取一定质量的重物,但是由于假肢肩部关节为垂直关节机构,以及本身重力矩的存在,导致假肢抓取重物的质量偏小,为此需要考虑如何提高假肢抓取重物的能力,由于假肢的设计安装空间有限,更换体积功率较大的舵机不现实,因此,为了何提高假肢抓取重物的能力,需要为假肢设计重力平衡装置。针对以上问题,以一种智能上肢假肢为基础,利用优化理论设计了一种假肢气动平衡机构,可以有效的平衡假肢重力矩,提高假肢抓取重物的能力。
2 建立机构优化设计模型
2.1 确定气动平衡机构结构形式
智能上肢假肢结构原理图,如图1所示。位于肩部的假肢大臂驱动舵机,驱动假肢大臂及以下的结构前后摆动,可以实现整个手臂向后摆动10°,向前摆动90°。为了平衡掉大臂部分重力矩,从而减小假肢大臂驱动舵机的驱动力矩,为假肢大臂设计安装了一种气动平衡机构。气动杆的安装要注意:需满足假肢大臂在其运动范围内无运动干涉、无自锁现象等。通过建立机构数学模型,利用MATLAB获得了气动平衡机构的最优解,即气动杆的最佳安装位置和合适的推力大小,并输出其仿真模型以及优化过程图解。此外依据数据的运动仿真和获得的计算机图形也验证了结果是正确的。事例表明针对智能上肢假肢所设计的气动平衡机构可以有效的平衡假肢大臂重力矩,减小大臂驱动力矩。
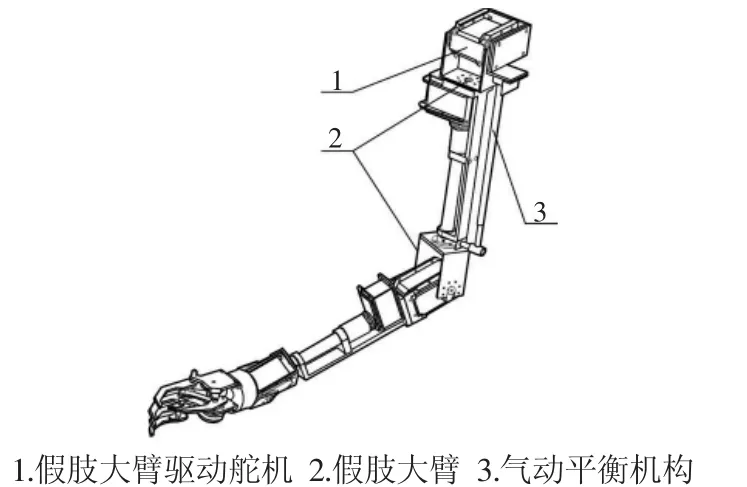
图1 智能上肢假肢结构原理图Fig.1 Intelligent Upper Limb Structure Principle Diagram
此智能上肢假肢气动平衡机构的目的是平衡假肢大臂及其以下部位的重力矩,从而减小假肢大臂的驱动力矩,故气动杆上支点将固定在在靠近肩部位置的机架上,下支点将安装在大臂上,其具体安装原理图,如图2所示。其中,智能上肢假肢初始状态正面图,如图2(a)所示。智能上肢假肢自然垂放侧面图,如图2(b)所示。智能上肢假肢前后摆动过程中侧面图,如图2(c)所示。智能上肢假肢向前摆动至水平状态侧面图,如图2(d)所示。该智能上肢假肢气动平衡机构主要由气动杆与假肢大臂构成,大臂在无运动的初始状态时其中心轴线为一铅垂线,此时从正面方向和从侧面方向看大臂重力矩为0,当假肢大臂摆动时将产生重力矩,到前摆端平状态大臂重力矩达到最大,在此运动过程中,气动杆的推力将平衡掉假肢大臂部分重力矩。气动杆两端的安装形式均为一种球铰形式,并且气动杆在伸缩过程中其推力的大小基本保持不变的特性,利用气动杆该特性,设计气动杆和大臂精确的结构形式和安装尺寸,使得智能上肢假肢满足结构更为紧凑,耗能更小,运动启动更快且无运动干涉的目的。
2.2 确定气动平衡机构优化设计变量
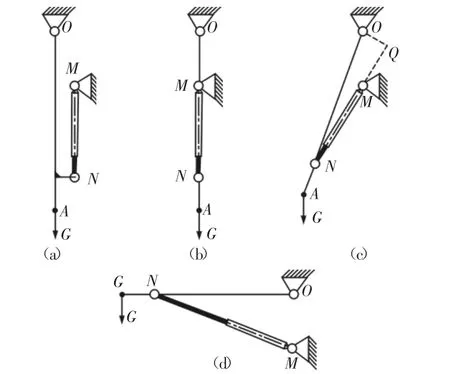
图2 智能上肢假肢运动示意图Fig.2 Motion Diagram of Intelligent Upper Limb Prosthesis
智能上肢假肢运动示意图,如图2所示。图中:O点—假肢肩部旋转关节点位置;M点—气动杆上支点安装位置;x1—距离O点距离,为一设计变量,且气动杆上支点M的位置相对大臂的摆动是固定的,N点为气动杆下支点安装位置,距离O点距离为x2,为一设计变量,N点的位置是安装在大臂上,是随大臂的运动而改变的,N2为大臂运动到某一时刻时气动杆下支点的位置,气动杆推力F在伸缩过程中基本恒定,推力值为x3,为一设计变量。
在大臂转动过程中,大臂与水平方向的夹角为α,为方便后面的仿真计算,在此设定大臂从水平开始向下摆动,其摆动角度没范围为(0~100)°,这种设定不影响最总计算结果。在MATLAB中,以x1、x2、x3为设计变量,考虑现实情况,另它们的取值在一定的限定范围内,并在此范围内对它们进行了初始化的赋值,编写智能上肢假肢大臂气动平衡机构优化设计程序,建立相应的运动参数数学模型,即摆动重力矩Mg1和Mg2、气动平衡机构平衡力矩MP、残余重力矩M1、M2等运动参数的数学模型:

式中:L1—大臂无负载重力臂;L2—大臂有负载重力臂;Mg1—无负载重力矩;m1—无负载大臂质量;Mg2—有负载重力矩;m2—有负载大臂和负载总质量;MN2—运动过程中气动杆长度;OQ—有负载和无负载时气动杆力臂;MP1—无负载时气动杆平衡力矩为;MP2—有负载时气动杆平衡力矩为;M1—无负载时残余重力矩;M2—有负载时残余重力矩;g—重力加速度。
2.3 确定约束函数
根据智能上肢假肢大臂的结构空间、气动杆的工作性能、保证假肢大臂在其活动范围内无自锁、无运动干涉等方面要求,设计关于所有设计变量的约束函数,约束条件如下:

2.4 确定目标函数
在优化设计计算的过程中,智能上肢假肢分为有负载和无负载两种状态,分别求出这两种状态下大臂摆动时的重力矩与气动杆推力产生的平衡力矩的差值以及此差值的最大值,比较这两种情况下的差值的最大值,较大者为目标函数:


式中:M1i=Mg1i-MP1i—无负载摆动时大臂的残余重力矩在不同时刻的大小,i=1,2,3…;M2i=Mg2i-MP2i—有负载摆动时大臂的残余重力矩在不同时刻的大小,i=1,2,3…;f1(x)—无负载摆动时大臂的残余重力矩绝对值最大值;f2(x)—有负载摆动时大臂的残余重力矩绝对值最大值;,min(f(x))—f1(x)和f2(x)中的最大值,即为目标函数。优化设计的最终结果是让f(x)达到最小,也就是让智能上肢假肢大臂摆动时大臂重力矩与气动杆的平衡力矩之差的绝对值的最大值达到最小。
3 输出优化结果及其运动仿真图
已知假肢重量为2kg,抓取重物质量为1kg,为固定值,为其他各待优化设计变量赋初值,OM=20mm,ON=200mm,假肢大臂的摆动范围设置为(0~100)°,按程序运行框图,如图3所示。运行在MATLAB中编制的优化程序,,调用软件工具箱中的函数,利用复合型优化设计算法,获得智能上肢假肢气动平衡机构优化计算的结果:

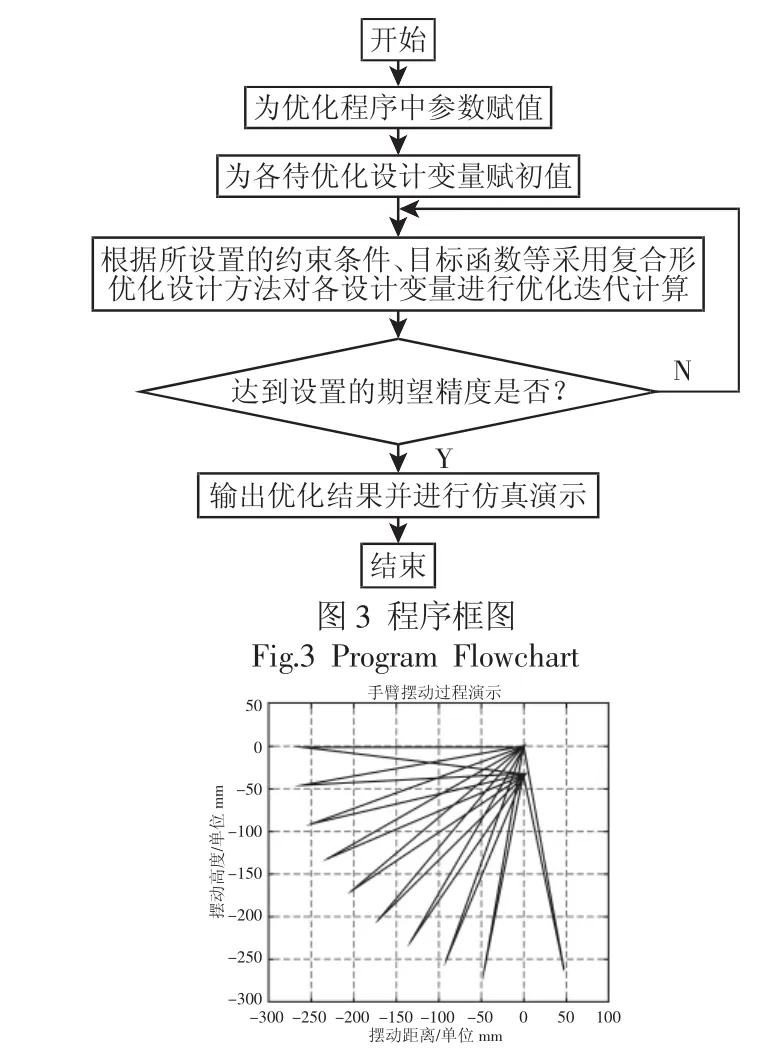
图4 智能上肢假肢大臂运动过程仿真Fig.4 Motion Process Simulation of Upper Arm of Intelligent Upper Limb Prosthesis
利用获得的优化设计计算结果,运行MATLAB编辑运算仿真程序,绘制出了机构的运动仿真图形,智能上肢假肢气动平衡机构在大臂摆动运动过程中的仿真曲线,如图4所示。大臂运动过程中,无气动平衡机构时大臂有负载、无负载重力矩变化曲线和有气动平衡机构的作用下,大臂有负载、无负载残余重力矩变化曲线,如图5所示。
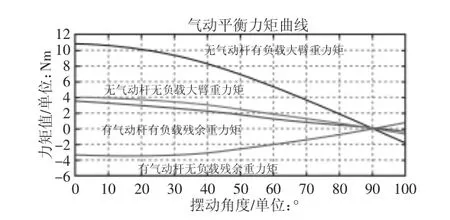
图5 气动平衡力矩曲线图Fig.5 Graph of Torque of Pneumatic Balance Mechanism
4 结论
针对减小智能上肢假肢大臂驱动舵机力矩问题,对气动平衡机构的优化设计进行了研究,以重力矩和平衡力矩为优化目标,建立机构数学模型,利用MATLAB获得了气动平衡机构的最优解,即气动杆的最佳安装位置和合适的推力大小,并绘制其仿真模型和优化过程图解,在该气动平衡机构在工作范围内可以平衡掉75%以上的重力矩,目前此智能上肢假肢已经做出了实体样机,实践证明了对肩部大臂驱动舵机气动平衡的优化结果能有效的减少驱动力矩。
[1]龚纯,王正林.精通MATLAB最优化计算[M].北京:电子工业出版社,2009.(Gong Chun,Wang Zheng-lin.Proficient in MATLAB Optimization Calculation[M].Beijing:Publishing House of Electronics Industry,2009.)
[2]刘惟信.机械最优化设计[M].北京:清华大学出版社,1994.(Liu Wei-xin.Mechanical Optimum Design[M].Beijing:Tsinghua University Press,1994.)
[3]郭仁生.机械工程设计分析和MATLAB应用[M].北京:机械工业出版社,2008.(Guo Ren-sheng.Mechanical Engineering Design Analysis and MATLAB Application[M].Beijing:China Machine Press,2008.)
[4]陈立周.机械优化设计方法[M].北京:冶金工业出版社,2005.(Chen Li-zhou.Mechanical Optimal Design Method[M].Beijing:Metallurgical Industry Press,2005.)
[5]樊炳辉,邹吉祥,孙高祚.肩离断多自由度机器人型假肢肩部气动平衡机构的优化设计[J].机械设计与制造.2011(7):9-11.(Fan Bing-hui,Zou Ji-xiang,Sun Gao-zuo.Optimization design on pneumatic balance structure of MDOF robotic prosthesis’s shoulder[J].Machinery Design & Manufacture,2011(7):9-11.)
[6]樊炳辉,曹燕杰,邹吉祥.一种康复用多自由度假肢肘关节气动平衡机构的优化设计[J].机械传动,2011(1):66-68.(Fan Bing-hui,Cao Yan-jie,Zou Ji-xiang.Optimal design of a kind of aerodynamic balance structure for multiple degrees of freedom prosthetic elbow joint using for recovery[J].Mechanical Drive,2011(1):66-68.)
