巴基斯坦ML1铁路扩能项目工程测量方法研究
2018-03-02
(中铁工程设计咨询集团有限公司济南设计院,山东济南 250022)
1 工程概况
巴基斯坦伊斯兰共和国铁路ML-1线途经信德、旁遮普和开伯尔-普赫图赫瓦三省,是巴基斯坦铁路运输的主通道。线路南端起于卡拉奇(Karachi),向东北方向经洛赫里(Rohri)、木尔坦(Multan)、拉合尔(Lahore)后转向西北方向,经拉瓦尔品第(Rawalpindi)止于白沙瓦(Peshawar),既有正线全长1 817 km(含洛德兰至哈内瓦尔弦线91 km)。其中既有铁路卡拉奇(Karachi)经木尔坦(Multan)、拉合尔(Lahore)至沙赫德拉(Shahdara)段(1 270.83 km)和查克拉拉(Chaklala)至戈尔拉(Golra)段(18.63 km)为复线铁路;既有铁路沙赫德拉(Shahdara)至查克拉拉(Chaklala)段(277.04 km)、戈尔拉(Golra)至白沙瓦(Peshawar)段(159.58 km)和洛德兰(Lodhran)至哈内瓦尔(Khanewal)段(91 km)为单线铁路。哈维连(Havelian)支线为单线铁路,南端起于ML-1线Taxila站,北至哈维连(Havelian)站,既有正线全长55.11 km。
本次ML-1线扩能项目工程为Mehrabpur(梅赫拉普)至North Block Hut(北街屋)段既有双线(长93.8 km),海德拉巴(含)至纳瓦布沙阿(不含)既有双线(长114.08 km),共计207.88 km(如图1所示)。
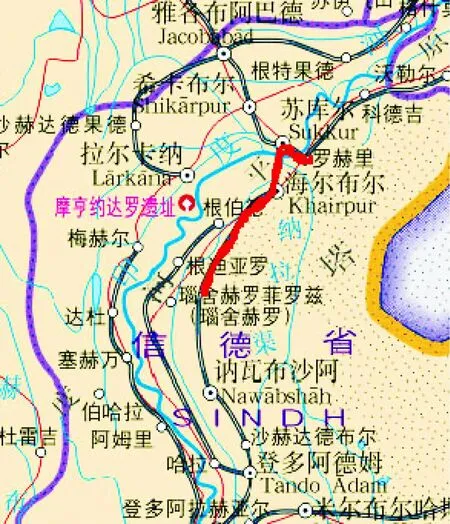
图1 Mehrabpur-North BlockHut地理位置示意
2 坐标系统与高程系统选用
2.1 平面坐标系
采用工程独立坐标系统,线路高程面上的边长投影变形值不大于25 mm/km,即投影长度变形(包括高程归化、高斯正投影变形之和)不大于1/40 000。采用WGS84参考椭球,ITRF2005框架,高斯投影[1,2]。东坐标和北坐标的加常数分别为500 km、0。工程椭球构建采用改变椭球参数的方法(即参考椭球长半轴直接加投影面大地高并保持扁率和定向不变)。参照中国铁路框架网CP0的技术标准(一等)建立全线的框架平面控制网(CP0),框架平面控制网CP0每50 km左右布设一个控制点,观测1~2个时段,每个时段≥4 h。数据处理:采用GPS长基线解算软件,精密星历数据。次级平面控制网参照中国铁路基础平面控制网CPI的技术标准,按四等GPS建立。基础平面控制网CPI每2 km左右建立一个控制点,观测、计算按四等GPS测量要求执行[1,2,12]。基础平面控制网(CPI)联测至框架平面控制网(CP0)。
本段收集2个国际IGS点(WGS84参考椭球,ITRF2005框架坐标),位于距离巴基斯坦最近的乌兹别克斯坦、印度境内,作为本次框架控制网CP0约束平差的起算点(如表1)。

表1 CP0约束平差起算点 m
2.2 高程系统
采用巴基斯坦国家高程基准,按四等水准技术标准建立高程控制网,沿线每2 km埋设一个线路水准点,点位与平面控制点共桩[1,2];另外,在桥梁两端的桥台应加设水准点,桥台水准点采用凿刻方法设置。收集巴基斯坦铁路部门全国高程控制点(SOP)2个,分别位于纳瓦布沙阿、罗赫里,作为本次水准计算的起算点(如表2)。

表2 高程控制测量起算点
3 平面控制网的建立
首先建立框架控制网CP0,然后在框架控制网CP0基础上布设基础平面控制网CPI,各级平面控制网的作用为:框架控制网CP0主要为勘测、施工建立平面坐标框架;CPI主要为勘测、施工提供坐标基准。本项目采用四等GPS测量。各级平面控制网的主要技术要求如表3。

表3 各级平面控制网设计的主要技术要求
3.1 框架控制网CP0
CP0控制点沿线路走向每50 km左右布设一个,在线路起点、终点及与相邻衔接段,均应布设CP0控制点。本段共布设3个CP0点,分别位于线路起点(CP009)、中点(CP010)、终点(CP011)。CP0控制点静态测量过程中,与相邻的Nawabshah至Lakah Road段范围内布设的CP0控制点CP007、CP008同步观测。按照技术设计书要求观测1个时段,时长不小于6 h,保证线路框架网的测量精度和相邻段落的平顺衔接[1,2],CP0网形见图2。
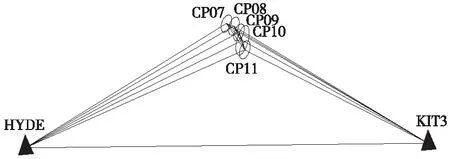
图2 CP0网形
CP0基准网基线向量解算采用商用软件GAMIT,并与相邻的Lakah Road-Rohri段CP0测量数据统一解算。基线解算前,按规范及技术设计要求对外业全部资料进行检查和验收,检查结果应满足技术设计书要求。基线解算前,通过Internet获取精密星历(IGS)数据,采用精密星历进行基线解算。同一时段观测值的数据剔除率应小于10%。采用多基线解算模式进行基线解算,计算结果应包括基线向量的各坐标分量及其协方差阵等平差所需的元素。解算所有相关基线向量,生成otesta.303基线文件[9,11]。各项指标统计见表4。
GNSS网平差采用Tgppswwin32进行三维整体平差处理。无约束平差选取IGS站KIT3点空间坐标作为起算基准。无约束平差计算指标统计见表5。

表4 CP0控制网计算环闭合差精度指标统计 mm
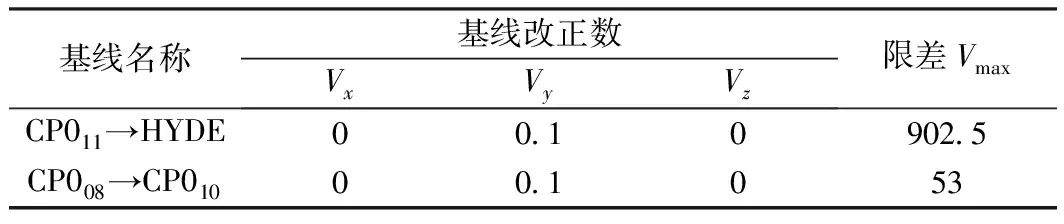
表5 CP0控制网计算无约束平差精度指标统计 mm
将KIT3和HYDE的空间三维坐标转换为大地坐标,并进行约束平差计算。各项指标统计见表6。

表6 CP0控制网计算约束平差精度指标统计
3.2 基础平面控制网CPI
CPI控制网应在CP0的基础上,按四等GNSS网要求施测(如表7)[3,4,6]。

表7 各级GNSS平面控制网的主要技术
CPI控制网沿线路敷设,每隔2 km左右布设一个控制点,采用边联结方式构网。大的车站和大桥、长大隧道应增设控制点。大的车站布设至少2个点,点对必须通视,间距一般为600~800 m[3,7]。本项目中,在框架控制网(CP0)基础上布设了46个基础平面控制网点(CPI),编号为CPI230-CPI274(见图3)。
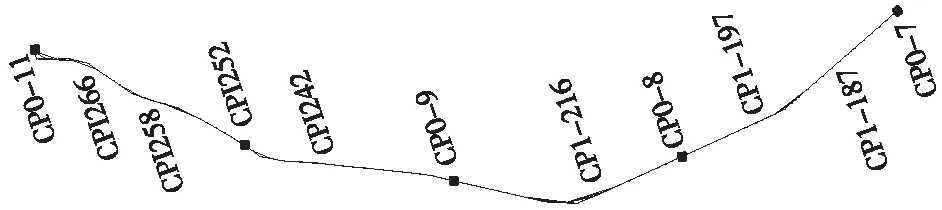
图3 CPI网形
观测中,与相邻的Nawabshah至Lakah Road段落范围内CPI控制点CPI228、CPI229进行了搭接,保证线路基础平面网的平顺衔接。GNSS基线采用静态相对定位模式(广播星历),以LGO商用软件解算[4]。基线解算指标统计见表8。

表8 CPI控制网计算环闭合差精度指标统计 mm
在CPI基线解算合格的基础上,固定CP008空间三维坐标,进行无约束平差计算(见表9)。
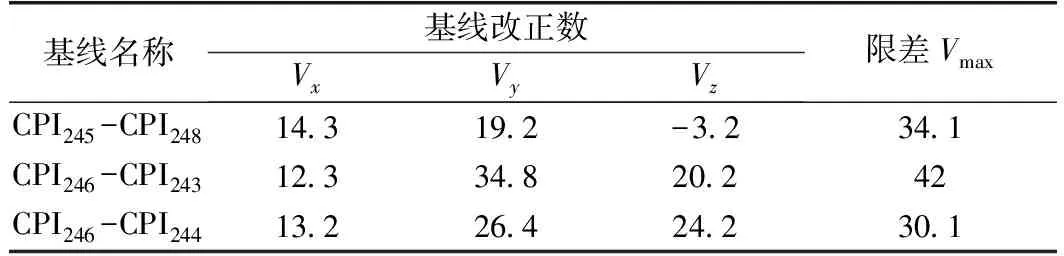
表9 CPI控制网计算无约束平差精度指标统计 mm
以联测的CP0点计算结果作为已知点进行CPI控制网的约束平差。对位于测区中部的CP010进行三维约束,两端的CP0点进行二维约束(见表10)。

表10 CPI控制网计算约束平差精度指标统计
提供标准三度带分带坐标,中央子午线经度为68°30′,投影面大地高程为-45 m,坐标结果数值保留至mm。
4 校正参数求解
4.1 作业测区划分
本项目主要采用GNSS-RTK方法开展作业,包括百米标丈量、中线测量、中平测量、水文测量、横断面测量等。将整个线路测区划分为6个作业区,每个作业区的长度不超过15 km;每个作业区内保证含有5~6个控制点,两作业区保证一对以上GNSS点衔接共用,以确保各测段之间的衔接。
4.2 校正参数计算
(1)经验四参数法
采用作业区内5~6个已知GNSS控制点的两套平面坐标进行求解。转换参数残差应满足以下要求:平面坐标残差X、Y分别小于±15 mm,高程残差小于±20 mm。基准站设在作业测区中心附近GNSS控制点上[6,7]。
(2)单点高程校正法
①单点高程校正法的原理是采用一个点的异常高(=大地高-水准高)作为常量平差值[6,11]。
②每个基准站必须使用一个参数。
③求解基准转换参数时,选取基准站相邻的控制点4个。控制点顺序:基准站控制点必须为首个,其余顺序随机。所有点均参加水平校正,垂直校正仅选择基准点(见图4)。
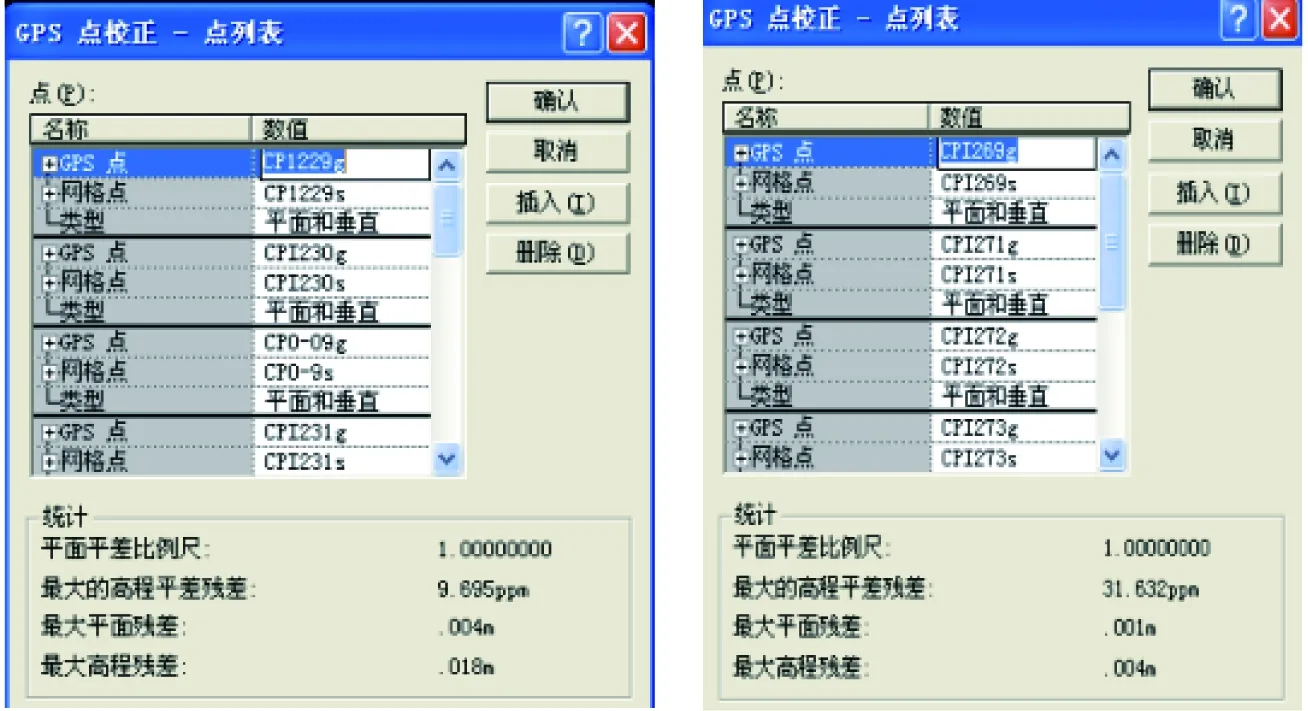
图4 点校正
④基准点与流动站测量距离为1 km以内,困难段不超过1.5 km。
⑤基准站与流动站的参数应匹配。
⑥外业成果导出之前禁止重新计算参数,以免引起已测外业成果因参数变化产生错误。
单点高程校正法线路中心坐标与全站仪采集的线路中心坐标较差见表11(以5 km为例)。
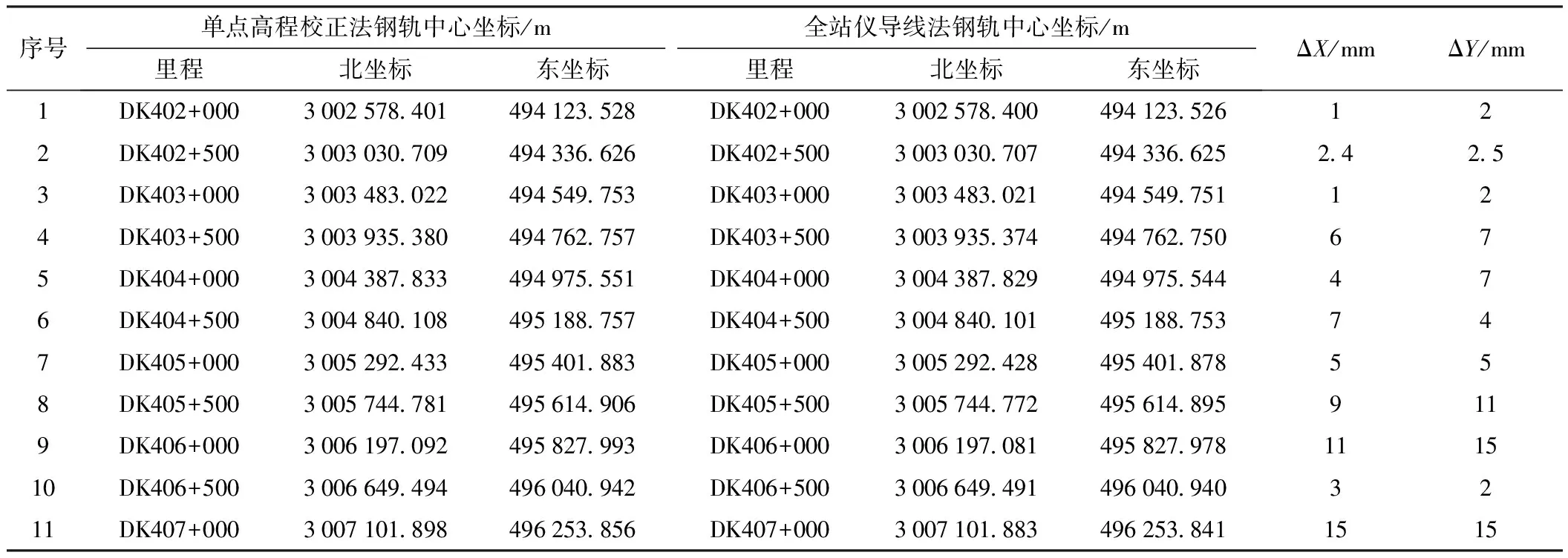
表11 单点高程校正法与全站仪导线法采集钢轨中心坐标较差
单点高程校正法轨顶高程与水准仪中平较差见表12(以5 km为例)。
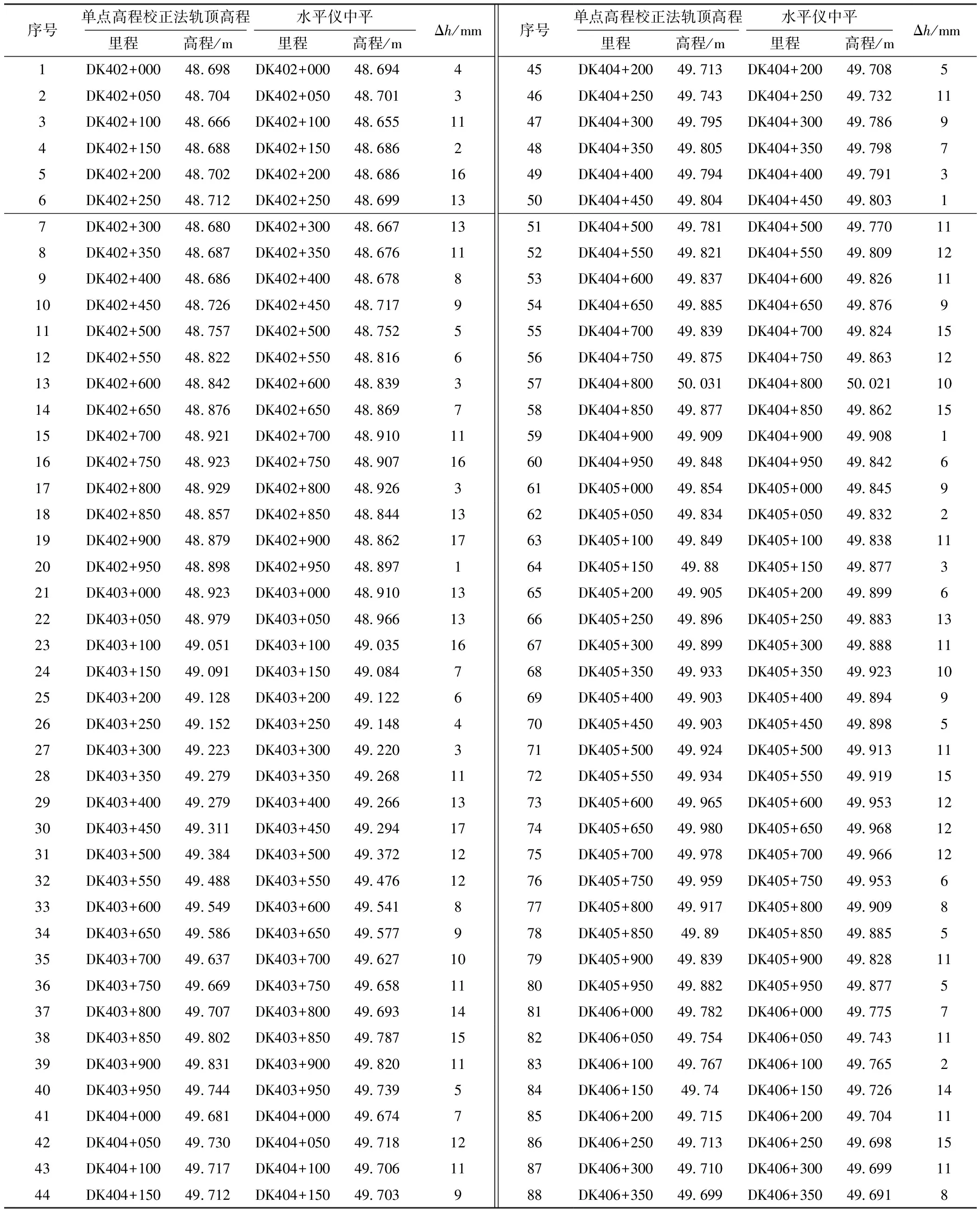
表12 单点高程校正法轨顶高程与水平仪中平较差
经过数据对比,对于小范围内的坐标和轨顶高程采集,单点高程校正法均能满足勘测要求。
5 GNSS-RTK三维一体化既有线测绘
在平面高程控制网的基础上,采用GNSS-RTK技术,一次性进行里程、中线拨距、轨面高程测量。在进行既有线里程、轨道高程、轨道中心坐标测量时,同步开展桥涵(调查及照片)、路基专业加桩测量。GNSS-RTK采用“一拖三”的形式:一个主站、一个流动站测量右线准确里程及中线,一个流动站用于桥涵路基加桩,一个流动站用于对应测量左线的轨面高程及中心线坐标。
5.1 既有线中线测量及里程计算
(1)线路里程按既有线右线拉通。并行地段,左线对应右线里程开展既有轨面、曲线整正拨距测量工作;绕行地段单独推导里程,单独开展测量工作。
(2)既有线的里程从现场直线地段公里标引出。
(3)对于长直线地段,为减少拨距量,按照折线处理。当交角小于12′时,不配半径,里程按折线推导。当交角大于12′时,配10 000 m半径推导里程。
(4)每个测量点观测时间不少于15 s,信号遮挡地段延长到30 s。采用对中杆、基座进行对中固定测量。
(5)采用既有线中线坐标计算曲线总偏角,结合巴方提供的台账资料或现场台账进行曲线要素配置,推导中线里程。
5.2 既有轨面高程及钢轨中心坐标测量
(1)直线地段桩间距不超过50 m,曲线地段不超过20 m。
(2)直线地段测量钢轨中心,曲线地段既测量内轨高程,又测量钢轨中心坐标。直线地段钢轨中心高程和曲线地段内轨高程即为既有轨面高程成果。
(3)既有轨面高程及钢轨中心坐标测量采用天宝GPS-RTK测量,基准站置于CPI点位上,基准站与流动站间直线距离不超过1 km,困难情况下不超过1.5 km。无信号地段采用高精度全站仪进行测量。
5.3 整正拨距计算
(1)整正拨距计算根据实测钢轨中心坐标进行,直线地段桩间距50 m,曲线地段桩间距20 m。
(2)参照巴方提供台账或者现场台账曲线要素,按照曲线半径、缓和曲线配置表进行整正拨距计算。半径、缓和曲线长度单位为“m”。为了尽可能减少拨距量,按半径值为“5”的整倍数、缓和曲线长度值为“10”的整倍数配置。
(3)同心圆曲线,左右线宜采用同一方位角。
6 结束语
在本项目中,既有铁路的现状(直线边过长)制约着控制网的结构和控制网网形,进而影响校正参数计算。在受影响地段,小范围使用单点高程校正法,解决了因控制网网形不佳而造成的参数计算残差过大的情况。在使用范围内,经过高精度全站仪和水准仪的检核,可满足使用要求。
在一定的技术条件(平面、高程控制网的精度、点间距等)支持下,GNSS-RTK三维一体化测绘可提高既有线测绘综合作业效率,其里程丈量、中线平面及中平均能满足勘测设计要求。
[1] TB10101—2009 铁路工程测量规范[S]
[2] TB10054—2010 铁路工程卫星定位测量规范[S]
[3] TB10105—2009 改建铁路工程测量规范[S]
[4] 李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社,2010
[5] 张建民,刘晓明.GPS-RTK三维一体化既有线测绘方法的研究[J].铁道勘察,2012(5):6-9
[6] 周忠谟,易杰军,周琪.GPS卫星测量原理与应用[M].北京:测绘出版社,2004
[7] 吕益恕.铁路勘察与设计[M].北京:中国铁道出版社,1994
[8] 丁克良,刘成,卜庆颢,等.GPS TTK技术在铁路既有线勘测中的应用[J].中国铁道科学,2005,26(2):49-52
[9] 匡团结.TBC与GAMIT进行高速铁路框架控制网基线解算的精度分析[J].铁道勘察,2015(4):8-11
[10] 张大春,赵峥.GPS-RTK技术在铁路勘测中的应用分析[J].北京测绘,2009(3):31-33
[11] 魏二虎,黄劲松.GPS测量操作与数据处理[M].武汉:武汉大学出版社,2004
[12] 孔祥元,郭际明,刘宗泉.大地测量学基础[M].武汉:武汉大学出版社,2006
