基于贝叶斯模型的雾霾天高速公路交通事故发生机理研究
2018-03-01刘志强张爱红
刘志强,王 玲,张爱红,倪 捷
(1.江苏大学 汽车与交通工程学院, 江苏 镇江 212013; 2.公安部交通管理科学研究所, 江苏 镇江 212013)
雾霾天气近几年在我国各地频繁出现。据了解,2015年我国受雾霾天气影响的面积约占全国国土面积1/4,约6亿人次受影响,造成多起多车相撞的交通事故,对国家和人民群众的生命、财产安全构成巨大威胁。世界各国对高速公路运行的管理经验表明:在所有不利天气条件中,车辆在雾霾天行驶时所产生的危害最大[1]。因此,迫切需要研究雾霾天气下高速公路交通事故发生机理,提高雾霾区高速公路行车安全,减少人员伤亡和经济损失。边疆[2]基于单车道跟驰模型研究了雾霾天气时速度对道路交通安全的影响,求出在不同能见度时驾驶员应保持的安全车速和最小安全行驶距离。王杰等[3]研究了雾霾天不同能见度和不同道路纵坡对交通安全的影响,提出了在不同能见度和不同坡度时的限制速度。曾志伟[4]分析了在雾天摩擦阻力对车速的影响,探索了雾天的交通安全状况。
目前国内外经常使用的层次分析法主观因素占比较大,且难以计算,而聚类分析法较难找出事物之间的相互内在联系,因此本文结合济南市雾霾天下高速公路道路交通事故资料,发挥贝叶斯网在系统分析方面的优势,分析雾霾天气下高速公路上的道路交通事故发生机理,为改善雾霾区高速公路交通安全状态提供基础理论。
1 雾霾天气下城市道路交通系统特征
1.1 驾驶员生理、心理特征
在雾霾天气下的高速公路上行驶时,当能见度小于50 m时,会引起驾驶员高估速度,当能见度大于 100 m时,会导致驾驶员低估速度。因此,在雾霾天气行驶时,驾驶员不能正确感知速度,进而不能判断两车间的相对车距,极易引发事故。
驾驶员有80%的路况信息直接来源于视觉,由于雾霾天能见度较低,驾驶员视距较短[5],当在高速行驶时较容易发生突发情况,令驾驶员措手不及,加之高强度、长时间的精力消耗和视觉疲劳,进而产生精神疲劳,使驾驶员注意力及控制力下降,极易引发交通事故。
调查表明:在雾区高速公路上驾驶时,有65%的驾驶员会感到心理紧张,44%的驾驶员更容易急躁,75%的驾驶员更容易感到疲劳[6]。因此,一旦意外出现,易因惊慌失措而引发交通事故。
1.2 路面摩擦因数
在雾霾天气,车轮与路面间的摩擦因数、道路通行条件变差,致使车辆在行驶过程中易失去控制,如行驶过程中的车轮打滑、制动过程中的制动跑偏等,从而引发极其严重的交通事故。
1.3 车速、车头间距
当车辆在高速公路上以稳定的速度前进时,车间距大于等于最小行车安全间距才不会导致事故发生[7]。而较快的行驶车速是雾霾天气下高速公路上交通事故高发的一个重要原因,当行驶在能见度较低的环境时,整体车辆的平均速度会呈现出下降的趋势,但在较多的驾驶行为中,驾驶员的实际行驶速度的下降与能见度的下降并不成理论比例关系[8],在这种情况下,如果驾驶员不减速行驶,很容易因能见度的降低导致刹车不及时,从而引发交通事故。
在雾霾天气下,不同路段的能见度、雾霾的严重程度会有所不同,驾驶员不能及时适应这种能见度的快速变化,易产生视觉疲劳与错觉,从而影响驾驶员正确判断车辆间的相对位置。
1.4 交通流
交通流主要通过在不同交通流状态下车辆之间会有不同的干扰来影响高速公路上的交通安全。
2 雾霾天气下高速公路交通事故特点
2.1 每天中4:00—8:00是事故的高发时间段
在所有雾霾天气下高速公路上发生的交通事故中,4:00—8:00发生的交通事故起数和死亡人数最多,分别占全年雾霾天气下高速公路上发生交通事故起数和死亡人数总数的54.67%、45.10%。
2.2 碰撞类型
我国的高速公路一般采用分隔行驶,特别是在带有中央分隔带的高速公路上,雾霾天发生的事故几乎都是追尾事故,占总雾霾天高速公路交通事故的61.46%,其次是两车相撞,占22.92%,翻车事故占13.54%,车辆爆炸占1.04%,冲出隔离带占1.04%。
2.3 交通事故的规模及严重程度
据相关统计,在所有雾霾天气下高速公路上发生的交通事故中:仅涉及1辆车的交通事故占 18.75%;涉及 2辆车的事故占 23.9%;涉及2辆以上的事故占57.29%[9-10];无伤亡的仅占2%;死亡1~3人的占38%;死亡3~10人的占38%;10人及以上的占11%。由此可见,雾霾天气下高速公路上发生的交通事故大都具有较大规模且事故程度较严重。
3 贝叶斯网的概念及结构的构建
3.1 贝叶斯网的概念
贝叶斯网是一种概率网络,它是基于概率推理的图形化网络,是基于概率推理的数学模型。所谓概率推理就是通过一些变量的信息来获取其他概率信息的过程。贝叶斯网是一种有向、无环的拓扑,它由节点和有向边组成,每个变量的状态由1个节点来表示,变量之间的关系(因果关系)由有向边表示,条件概率表是用来表示变量之间置信度的一种概率表[11]。
3.2 贝叶斯网的基本公式
1) 条件概率:设A、B为2个事件,用P(A|B)表示事件A在事件B已经发生条件下的发生概率。
2) 联合概率:表示2个事件共同发生的概率。A与B的联合概率表示为P(AB)或者P(A,B)或者P(A∩B)。
P(AB)=P(B/A)P(A)
(1)
3) 全概率公式:若事件B1,B2,…,Bn互不相容,且
B1+B2+…+Bn=Ω
(2)
则称B1,B2,…,Bn构成一个完备事件组。
若事件B1,B2,…构成一个完备事件组且都有正概率,则对任意一个事件A,有
(3)
式(3)被称为全概率公式。
4) 贝叶斯公式:根据式(1)和(3)得出贝叶斯公式为
(4)
3.3 贝叶斯网结构的构建
1) 贝叶斯网学习
贝叶斯网学习是指通过数据分析获得贝叶斯网模型的过程。贝叶斯网学习分为参数学习和结构学习,其区别在于进行学习时贝叶斯网的结构是否已经明确。如果网络结构已知,称为参数学习;如果网络结构未知,则称之为结构学习[12]。这里仅介绍基于贝叶斯估计进行参数学习。
在贝叶斯估计中,参数θ为随机变量,样本数据D(D1,D2,…,Dm)用贝叶斯公式,将先验分布和似然函数结合得到后验分布,即
P(θ|D)∝P(θ)L(θ|D)
(5)
对贝叶斯网N=(D,θ)进行参数估计。θ的对数似然函数与充分统计量mijk的关系为:
(6)
得θ的似然函数为:
(7)
根据贝叶斯公式可得:
(8)
假设:
(9)
得后验分布为
(10)
2) 贝叶斯网结构构建
目前常用的贝叶斯网结构构建的方式有3种[13-14]:① 贝叶斯网络的节点、结构由领域专家确定,并确定贝叶斯网的结构参数。② 叶斯网络的节点由当前领域专家确定,贝叶斯网的结构通过大量的已有训练数据构建,并确定贝叶斯网的分布参数。③ 贝叶斯网络的节点、结构由领域专家确定,通过机器学习的方法从训练数据中得到贝叶斯网络的分布参数。通过第3种方式来构建贝叶斯网的结构、学习网络的分布参数。
3.4 贝叶斯网分析交通事故原因的适用性
道路交通系统是一个由人、车辆、道路、环境4要素构成的动态系统,系统中各要素及各要素关系都具有很强的不确定性[15]。因此,道路交通事故的发生机理必须从系统的、不确定性的角度去认识和分析。贝叶斯模型正是一种用于不确定知识表达和推理领域最有效的模型之一。将贝叶斯模型应用于交通事故的机理分析中,可以从系统角度,用直观化的图形结构了解、分析系统内部各要素及各要素间的关系。
由于贝叶斯网的推理方法相对成熟,计算简单,因此贝叶斯网非常适合分析交通事故问题。
4 基于 NETICA 建立城市雾霾天事故分析的贝叶斯网拓扑结构及推理
NETICA是一款功能强大、易于使用、完全程序化的贝叶斯网络分析软件。
4.1 节点随机变量的确定
我国将浓雾天气下的可视距离划分为6级[3],并制定相关的规范措施,具体见表1。
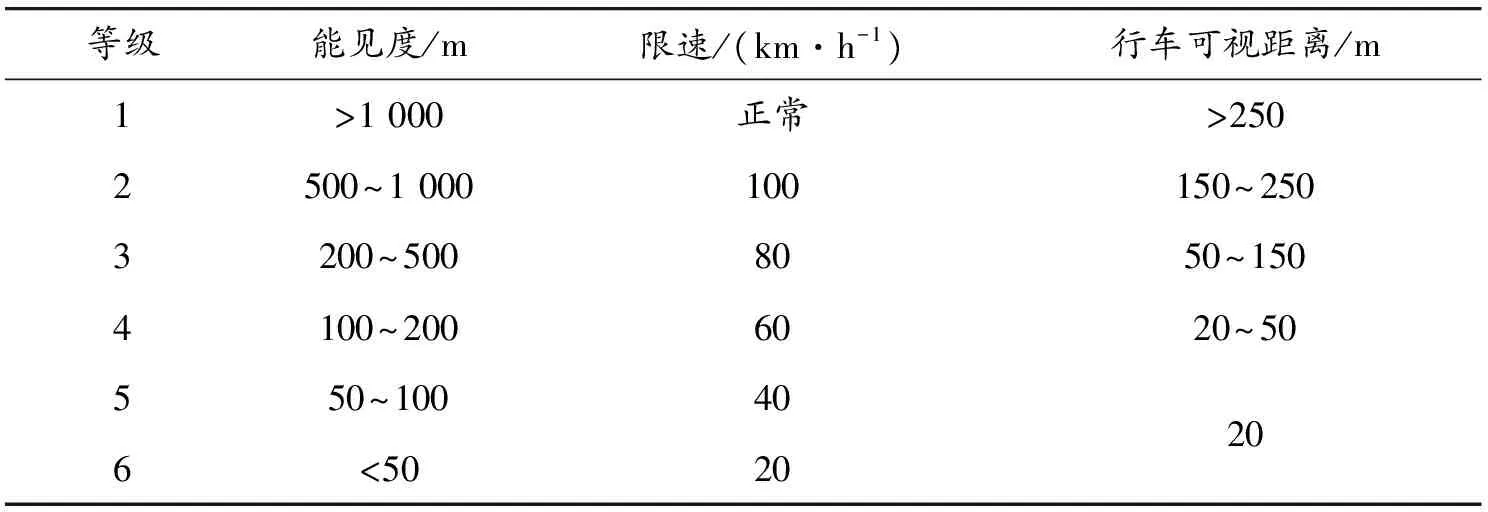
表1 不同雾霾等级及相关的规范措施
为选取与雾霾有关的交通事故因素以简化模型,在确定节点的过程中,仅选取雾霾等级、交通流状态、车速作为道路交通事故的影响因素作为贝叶斯网络的节点,变量集确定如下:
Y={X1,X2,X3,A}
其中:X1为天气情况;X2为路段车流量;X3为车速(轿车);A为交通事故。X1:{0,1,2,3,4,5},分别代表1~6级雾霾;X2:{0,1,2,3,4},分别代表0~80,80~160,160~240,240~320,320以上(单位:车辆数/h);X3:{0,1,2,3,4,5},分别代表0~20,20~40,40~60,60~80,80~100,100以上(单位:km/h);A:{1,0},其中1表示事故发生,0表示事故不发生。
该模型的结构如图1所示,每个矩形框代表1个节点,而每个节点代表1个系统变量,节点之间的有向线(带箭头的直线)表示各变量之间的因果关系。
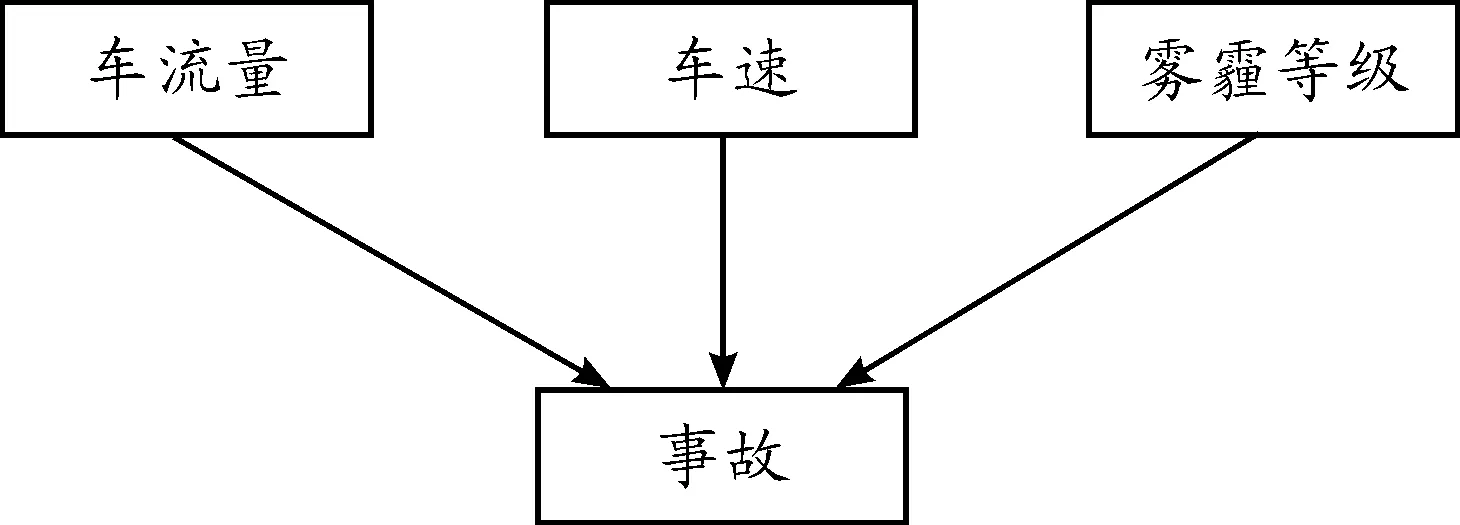
图1 雾霾天气下高速公路上道路交通事故发生机理的贝叶斯网结构
4.2 基于NETICA的雾霾天气下道路交通事故机理分析
根据雾霾天气下构造的用于高速公路交通事故机理分析的贝叶斯网结构,以2010—2015 年济南市雾霾天气下道路交通事故数据为样本(如图2、3所示),确定条件概率表。再利用 NETICA 贝叶斯网软件分析包进行学习[16],确定雾霾天气下高速公路交通事故机理分析的贝叶斯网模型,如图3所示。
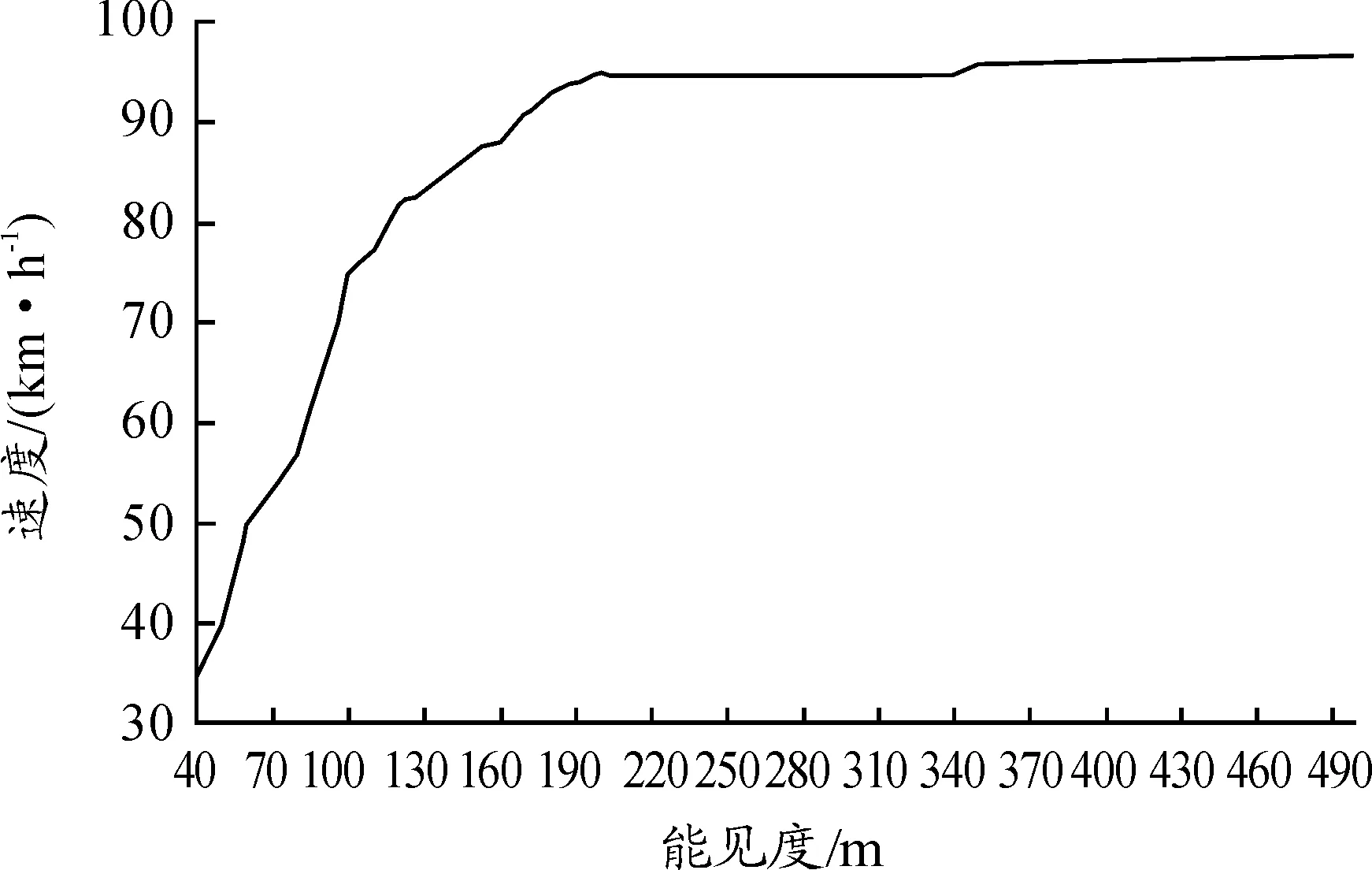
图2 济南雾霾条件下高速路段轿车车速与能见度关系
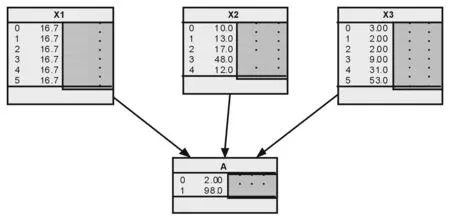
图4 济南市雾霾天气下高速公路道路交通事故发生机理分析的贝叶斯概网
4.3 结果分析
通过对大量济南雾霾天气交通事故数据的分析,得到高速公路交通事故发生概率,从而得出以下结果:
1) 当车流量和车速概率保持不变时,雾霾等级每升高1级,事故发生概率增加12%,尤其是在雾霾等级为4、5、6级时,事故发生概率明显增加。
2) 其他条件不变,车流量发生概率改变时,交通事故发生概率没有明显变化。
3) 其他条件不变,车速概率改变时,车速每增加20 km/h,交通事故发生概率增加23%。尤其是当车速和雾霾等级同时增加时,交通事故发生概率几乎以平方的速度增加。
计算出的事故概率与历史样本数据相比出现了偏差,出现这种情况的原因可能有两方面:一方面,因为本文只应用了有限的数据信息来对贝叶斯网进行概率学习,而贝叶斯网的学习需要尽可能多的数据来支持;另一方面,由于雾霾天气下高速公路上交通事故的发生是多个影响因素综合作用的结果,但本文主要提取了雾霾因素引起的交通事故,因此简化了模型,仅选取了天气情况、车流量和车速作为影响因素变量。基于以上两点原因,该模型的精确度略有下降,但是总体来说,该模型得到的结论是有效、可利用的。
雾霾天高速公路交通事故受多种因素共同影响且受数据采集限制,本文只选取了一段高速公路上的事故,且只在天气情况、车速和车流量3个方面进行研究,因此研究较粗略,但总体来看,研究结果可作为雾霾天气高速公路上车速控制和车流量的理论基础,即能见度在100~200 m时,车速应严格控制在60 km/h;能见度在50~100 m时,车速应严格控制在40 km/h;能见度在50 m以内时,车速应严格控制在20 km/h以下,以保证行驶安全。
5 结论
采用济南市雾霾天气下高速公路道路交通事故发生数据为样本,基于贝叶斯网模型分析雾霾天气下高速公路事故发生原因,得出雾霾天气下高速公路道路交通事故发生概率。
1) 当车流量和车速概率保持不变时,雾霾等级每升高1级事故发生概率增加17%,尤其是在雾霾等级为4、5、6级时,事故发生概率明显增加。
2) 车流量对交通事故发生的贡献概率不明显。
3) 其他条件不变,在车速和雾霾等级同时增加时,交通事故发生概率几乎以平方的概率增加。
[1] 张艳红,欧博,孙晓光.大雾天气高速公路交通事故成因分析及解决措施[J].中国科技信息,2008(19):31-32.
[2] 边疆.雾霾天气下车辆速度控制与车道跟驰模型技术应用[J].硅谷,2014(9):42-30.
[3] 王杰,郭莉.雾霾天气下的高速公路车速管理策略研究[J].中国西部科技,2015(9):118-123.
[4] 曾志伟.雾天高速公路交通事故成因分析及安全对策[J].公路与汽运,2008(5):44-47.
[5] HAGIWARA T.Background Luminance as a function of Illuminance Conditions and Visual Range in Fog[C]//15th Biennial Symposium on Visibility of TRB.USA:[s.l.],2000.
[6] 黄身森.雾天环境下高速公路行车安全与预警技术研究[D].西安:长安大学,2013.
[7] GARBER N J,GADIRAJU R.Impact of differential speed limits on the speed of traffic and the rate of accidents[J].Transportation Research Record,1992,22:1375.
[8] 丁小平,戴娟莉,王建军,等.雾区高速公路交通安全影响规律研究[J].公路,2010(6):152-158.
[9] 钟纯耀.高速公路单车事故统计分析研究[D].西安:长安大学,2008.
[10] 张巍汉.高速公路雾区交通安全保障技术[M].北京:人民交通出版社,2009.
[11] 俞娉婷,刘振元,陈学广.基于贝叶斯网络的一种事故分析模型[J].中国安全生产科学技术,2006(4):45-49.
[12] 相文森.城市冰雪道路交通事故成因及发生机理研究[D].哈尔滨:哈尔滨工业大学,2010(7):36-43.
[13] 宫秀军.贝叶斯学习理论及其应用研究[D].北京:中国科学院研究生院,2002.
[14] 林士敏,田凤占,陆玉昌.贝叶斯网络的建造及其在数据采掘中的应用[J].清华大学学报(自然科学版),2001,41(1):49-52.
[15] 毛敏,喻翔.道路交通事故致因分析[J].公路交通科技,2002(5):125-127.
[16] NETICA Onscreen Help [DB/OL].[2012-09-10].http://www.norsys.com.