接触电阻对传感器采样影响分析
2018-02-28何雨昂徐志书龙海峰桑庆宏樊茜
何雨昂 徐志书 龙海峰 桑庆宏 樊茜


摘要
本文分析了在工程应用中多余物对产品可靠性的影响,同时解释了该现象产生的原因;说明了一种多余物引入导致电子产品在特殊条件下发生故障的方式。
【关键词】接触电队 传感器 异常现象
1 引言
在伺服系统中,常使用电阻板片式位置传感器采集伺服执行机构的实际运动位置。当该传感器采样出现扰动时,会导致位置伺服闭环控制异常。该异常现象随位置伺服变化而变化,在伺服执行机构动作至行程最大值附近时,采样误差最为明显;当伺服执行机构动作至行程最小值附近时,基本检测不到采样误差。本文针对以上现象进行分析,得出该现象的产生原因。
2 伺服系统组成及异常现象
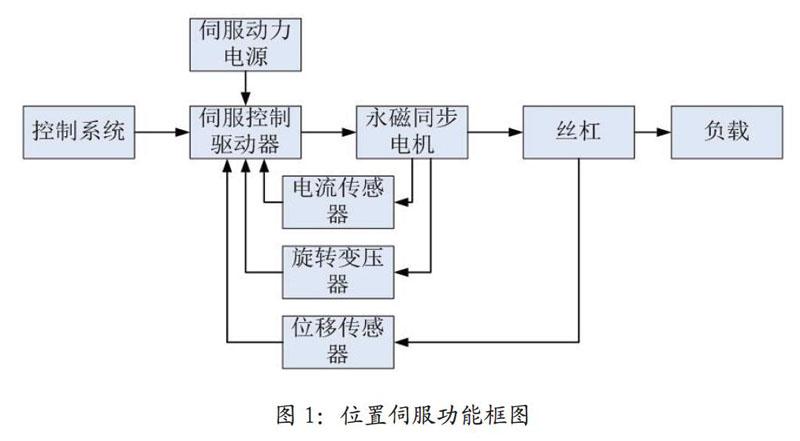
伺服系统控制永磁同步电机转动,带动丝杠伸缩,实现位置伺服控制。其原理框图如图1所示。
由图1可以看出,伺服系统由电流传感器构成内环控制;由旋转变压器构成中间环控制;由位置传感器构成外环控制。内环实现永磁同步电机的出力稳定,中间环实现电机转速稳定,外环实现位置伺服的精确控制。
若异常存在时,伺服控制驱动器在振动环境下工作,会出现线位移反馈在某些位置抖动的现象,同时伺服系统工作电流增大,母线电压出现波动。该现象如图2所示。
伺服控制驱动器控制机电作动器在两个正弦曲线的运动过程中,控制驱动器全程均在振动环境下,但仅在两个正半周出现明显采样异常现象。
3 原因分析与计算
伺服作动器的线位移通过线位移传感器采集实际运动位置,供电使用10V,为提高传感器线性度,在传感器机械零位增加5V电源。出现该异常现象是由于10V电源连接器位置存在多余物。伺服控制驱动器的电连接器若引入多余物,在静态下往往不易发现,但在振动环境下,该多余物会导致连接器的接触电阻在振动过程中增大。伺服控制驱动器位置传感器的硬件连接关系如图3所示。
如图3所示,当电刷采集到的电压为Ux时,由欧姆定律可知:因此,推导Ux的关系式为:
若不存在ΔR时,其电压Ux2为:
由于ΔR为异常接触电阻,其数值可变,因此在接触良好的条件下不存在ΔR,此时波动电压ΔUx与电阻的关系式为:
经过简化为:
由以上关系式中,R为电位计电阻,可认为其为恒值ΔR为接触电阻,可认为其为恒值。因此可以得出结论:因接触电阻ΔR变化产生的误差电压ΔUx的大小,与电刷采集的电阻Rx成正比关系。
4 计算验证
极限工况1:电刷位置接近线位移板片端头时,即Rx约为R,同时设电阻R为1KΩ,假定ΔR为10Ω。
极限工况2:电刷位置接近线位移板片中间位置,假定即Rx约为10Ω,假定ΔR为10Ω。
将以上两个工况分别带入ΔUx的关系式,得出的结果如表1所示。
由以上计算可以直观地看出,当线位移传感器的电刷接近中间值时,由于接触电阻导致的误差电压不足1mV,但当线位移传感器的电刷接近最大值,此时所测量的电壓仅增大约1倍,但此时误差电压增大了两个数量级。因此,从原理上可以证明当电刷接近最大值时,所采集的误差电压明显增大的故障现象。
5 结论
通过以上分析,证明电子产品在对接面产生多余物在一定的条件下会导致异常现象,该现象仅与供电回路中一个网络的阻抗相关。
参考文献
[1]许龙飞.运载火箭总装气密试验多余物控制方法分析[J].北京:质量与可靠性,2017.
[2]张辉.航天继电器多余物检测方法的综合分析与讨论[J].四川:机电元件,2003.