基于VW-PCA的盾构刀盘驱动液压系统故障诊断
2018-02-27郝用兴刘玉洋周建军郑淑娟
郝用兴, 刘玉洋,*, 周建军, 周 洋, 郑淑娟, 雷 超
(1. 华北水利水电大学机械学院, 河南 郑州 450045; 2. 盾构及掘进技术国家重点实验室, 河南 郑州 450001)
0 引言
盾构是一种集机械、电子、液压等学科高度融合的大型工程装备,液压系统是盾构的主动力系统。由于现场地质条件复杂,使得液压设备性能不稳定,冲击振动造成的装配精度下降、密封件与其配件相互磨损、油液污染、液压油黏度下降等问题导致液压系统故障频发,带来严重后果[1]。为确保盾构掘进过程中安全可靠地运行,及时消除故障隐患,需要对其进行及时有效的故障诊断。
在盾构液压系统的故障诊断研究方面,文献[2]将Fisher判别模型应用到液压系统的故障诊断中,证实了该判别法的实用性。文献[3]提出将改进的Elman神经网络算法应用于盾构故障预测系统,并通过工程实例数据验证了该算法的可行性。文献[4-6]提出将主元分析(PCA)引入到盾构液压系统的故障诊断中,并阐述了其具体应用。文献[7-8]也验证了主元分析模型(PCA)应用在故障诊断领域的有效性。传统诊断模型认为每个系统变量对于构建算法模型有着同样的作用,这使得各系统变量有着相同的权值,导致算法模型受到大量无关信息的影响,增加了从采集信息中获取故障分类信息的困难程度,无法满足盾构刀盘驱动液压系统故障诊断的正确性要求。因此,本文采用变量加权(VW)算法优化传统主元分析(PCA)模型,并将变量加权主元分析模型(VW-PCA)引入到盾构刀盘驱动液压系统的故障诊断中,从而突出主元分析模型(PCA)中各数据变量对不同故障类型的贡献程度,提高PCA故障诊断的性能。以天津轨道交通φ6 450 mm土压平衡盾构刀盘驱动液压系统作为研究对象,通过AMESim软件仿真刀盘液压驱动系统模型及6类故障特征,确定VW-PCA算法模型,获得各类故障检测数据的权值向量,利用已知正常检测数据构建的PCA模型确定控制阈值判断系统是否发生故障,再用测试样本加以验证VW-PCA算法模型的故障诊断正确性。
1 VW-PCA算法
1.1 VW算法
通常容易提取系统正常运行状态下各个变量的监测数据,当运行过程中某一时刻系统监测值超过控制阈值时,判断系统出现故障。此时通过对系统各变量赋予不同权值向量就能够突显各个变量对故障的影响程度,也可明显区别不同种类故障的特征。变量加权方法有多种,基于SPE和Hotelling’sT2统计量的贡献图就是一种使用广泛的变量加权方法。尽管贡献图计算简单,但是仍然需要先验知识来解释获得的贡献图[9]。文献[10]指出在变量加权的数学算法中,偏F值是一种较好的加权方法。偏F值是通过完全借鉴正常运行数据求得任意故障的权值向量,也可看作是将正常数据样本与故障数据样本如何分类的问题。令D0∈Rn0×m,Dk∈Rnk×m,其中:k=1,2,…,c;k代表某故障样本数据或正常样本数据;c表示故障种类个数总和。对于任意系统变量xi,其偏F值就是表征数据样本中添入这一变量对于精确区分正常数据与故障数据的贡献程度。其定义为:
(1)


(2)
式中:b0、bk分别为正常类数据D0∈Rn0×m和故障类数据Dk∈Rnk×m的均值向量;Dk是组合矩阵D0DkT的协方差阵。

(3)

1.2 VW在主元分析(PCA)上的应用
设采集n次过程数据,对每次采集数据都有m个采集点(变量),依次用X1,X2,…,Xm表达,得到初始的资料数据矩阵:
X=X1X2…Xmn×m。
(4)
主元分析方法是将讨论这m个变量对反映整个系统状态信息的问题变为寻找m个变量之间存在的线性关系问题,得到相互独立新的组合变量F1,F2,…,Fk(k≤m),能充分体现原变量所包含的信息。主元分析常规处理是对X作正交变换,得到原变量间的线性组合
(5)
满足每个主元的系数平方和为1,即
(6)
主元之间相互独立,即无重叠的信息。所以
cov(Fi,Fj)=0i≠j;i,j=1,2,…,m。
(7)
主元间的方差逐次减小,重要程度逐次降低,即
Var(F1)≥Var(F2)≥…≥Var(Fm)。
(8)
由以上各条件得到综合变量F1,F2,…,Fm依次为初始变量的第1,2,…,m个主元,且每一主元在总体方差中的占比逐次减小。而在现实应用研究中,常选用式(8)中方差较大的前p个组合变量代替原m个系统变量,实现降维的功能。
本文基于刀盘液压系统,构建VW-PCA数学模型,故障诊断的基本模型见图1。

图1 基于VW-PCA的故障检测流程Fig. 1 Flowchart of fault diagnosis based on VW-PCA
为实现盾构刀盘驱动液压系统故障诊断,需要将原始已知正常数据样本进行主元分析,得到正常数据类的Hotelling’sT2的控制限(阈值),同时将正常数据类与已知各故障数据类组合处理得到每一类故障的加权向量,用各故障类的权值向量去处理测试故障样本数据,得到测试数据类的Hotelling’sT2的值,根据该值判断测试数据是否发生故障。
2 变量加权主元分析(VW-PCA)诊断步骤
2.1 建立已知正常数据类的PCA模型
(9)
(10)
(11)
3)利用Q贡献图法获得主元的数量和相应的特征向量。
(12)
在工程应用中,以累积贡献率≥85%选取主元个数,即认为这些主元素可以体现全部的系统运行状态。
4)计算出正常数据类的Hotelling’sT2的控制限(阈值)。
(13)
式中Λ为按λ1>λ2>…>λm顺序排列的对角阵。
2.2 建立测试数据类的PCA模型

(14)
利用已求得的特征向量带入加权处理后的测试故障数据得到新的主元
(15)
2)算出测试数据类的Hotelling’sT2数值与2.1节确定的控制限比较,确定系统是否发生故障。
3 盾构刀盘液压驱动系统仿真分析
3.1 液压系统仿真建模
液压系统是盾构工作时的主动力系统,按照盾构运转时液压系统各部分功能不同,可将液压系统分为刀盘驱动、盾构推进、管片拼装机、螺旋输送系统等多个子液压系统[12]。不同的盾构子液压系统对应着不同的液压元件组成和控制方式,但是各个子系统均由基本液压系统组成,包含了液压泵、换向阀、液压缸或液压马达等基本液压元件。
本文以天津轨道交通φ6 450 mm土压平衡盾构刀盘驱动液压系统为研究对象,针对刀盘驱动液压系统故障发生的特征机制,研究基本液压系统的故障诊断方法,然后应用到盾构液压系统的各个子系统的故障诊断中。盾构刀盘驱动系统是盾构的重要组成部分,承担驱动刀盘旋转切削开挖面土体以及搅拌密封舱内土体的任务,具有功率大、功率变化范围宽、结构复杂等特点[13]。由于盾构刀盘是由多组液压马达驱动组成,而每组马达实现的功能和液压驱动回路的结构特点基本相同,因此为了便于液压系统模拟仿真,减少仿真工作量[14],将所选液压系统进行简化,仅选取1组液压马达驱动液压回路仿真,如图2所示。系统的工作原理如下: 液压泵提供动力,压力油经过三位四通电磁换向阀进入双向液压马达,驱动马达旋转,经过齿轮减速器驱动盾构刀盘转动完成土体的切削,溢流阀控制驱动过程中的系统压力。采用转动负载模型和转动摩擦转矩模型来模拟盾构刀盘旋转掘进过程中所受到的阻力[15]。

图2 盾构刀盘液压驱动系统简化图
Fig. 2 Simplified diagram of hydraulic driving system of shield cutterhead
以图2为仿真对象,采用AMESim软件建立盾构刀盘驱动系统仿真模型,通过修改关键参数仿真液压系统故障。主要仿真参数设置见表1。
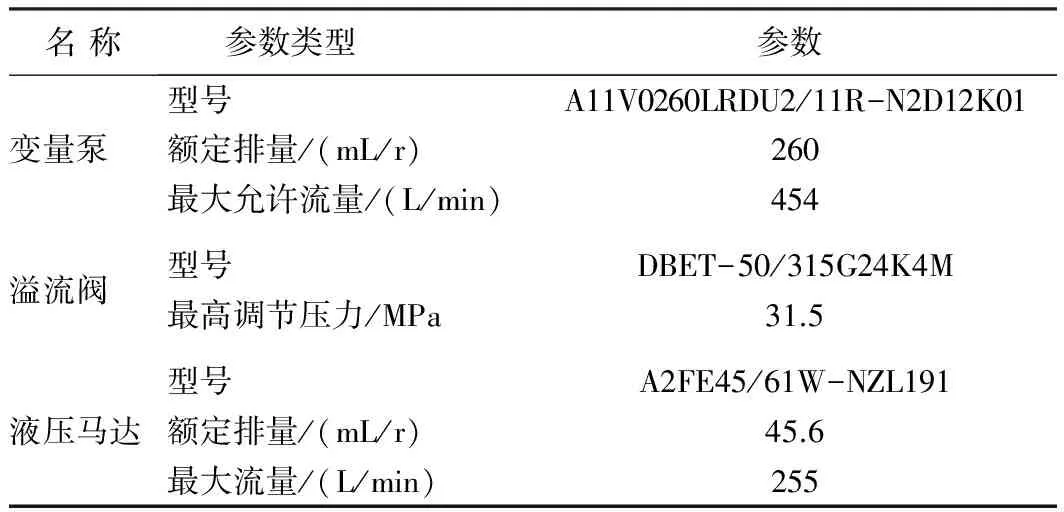
表1 仿真参数Table 1 Simulation parameters
3.2 故障仿真
本文以刀盘驱动系统作为多变量统计的故障诊断对象,其中有压力、流量、振动、温度、马达转速、刀盘转速和摩擦转矩等物理量显示刀盘驱动系统的运行状况。在图2所示的液压回路简图中,AMESim仿真软件可以直接检测到液压泵工作压力、液压泵实际流量、溢流阀进口压力、液压马达出口压力、刀盘转速、转动摩擦转矩和转动负载转矩等12个检测变量的实时值,检测变量名称如表2所示。

表2 检测变量Table 2 Diagnosis variables
液压系统因其各部分液压元件内部结构构造复杂和各回路间耦合作用,使得系统故障产生的准确位置难以检测。但大多故障是由于冲击振动造成的装配精度下降、密封件与其配件的相互磨损、油液污染、液压油黏度下降等引起的泄漏故障。同时,温升过高导致油液黏度下降及换向阀电磁铁故障在隧道盾构施工过程中也较为常见。因此,在实际的地铁施工过程中,盾构液压系统的故障类型繁多,为减少故障仿真的工作量,仅选取液压泵内泄漏、由系统温升导致的液压油液黏度下降、换向阀电磁铁失效等6种故障特征进行研究,故障名称及仿真参数如表3所示。

表3 故障描述Table 3 Fault descriptions
仿真实验采取闭环控制,采样间隔为10 s,采集1类正常样本(D0)和6类故障样本(D1、D2、D3、D4、D5、D6),每一类样本个数均为800。在MATLAB R2014b软件环境下将数据导入故障诊断算法模型中,将800组正常数据样本(D0)中的后250组数据作为正常类的测试数据,再从6类故障样本(共4 800组)中随机选取150组作为故障类的测试数据,共同组成测试数据集(共400组)。同时,将剩余正常数据样本(共550组)和剩余6类故障样本(共4 650组)作为训练数据集(共5 200组),计算出每一类故障对应各变量的加权向量,同时得出正常数据类的主元模型。
3.3 仿真结果与分析
将400组测试数据集分别用传统PCA算法和变量加权主元分析算法(VW-PCA)进行处理。结果如图3所示。

(a) 传统PCA算法

(b) VW-PCA算法
从图3中可以看出: 采用传统PCA算法,前250组正常类的测试数据均未超过阈值,但150组故障测试数据中仅有少量超过阈值,与预期检测效果差距较大,在实际应用中容易出现漏报; 而采用同样的测试数据,用1.1节中变量加权(VW)的方法处理150组故障测试数据,与传统PCA算法测试结果相比较,易知150组故障数据基本都在控制线(阈值)以上,诊断结果准确率非常高。
为直观比较传统PCA算法与VW-PCA算法在盾构刀盘液压驱动系统故障诊断中的准确率,分别统计6类故障数据在2种不同算法模型下的准确率,统计结果如表4所示。
表4 VW-PCA与PCA算法故障诊断准确率对比
Table 4 Comparison of fault diagnosis accuracy between PCA algorithm and VW-PCA algorithm %

故障类型PCA诊断准确率VW-PCA诊断准确率D15993D27995D36489D46690D55791D67294
从表3可以很直观地看出,假设各个系统变量对于构建PCA模型有相同权重时,系统诊断正确率低,然而变量加权主元模型VW-PCA能够显著提高系统诊断的正确率,最大可提高50%以上。同时变量加权(VW) 能够增强各系统变量对不同故障类型的贡献程度,减少故障信号的漏报,提高液压系统的故障诊断性能。因此,VW-PCA法能够有效适用于刀盘驱动液压系统故障诊断。
4 结论与讨论
对盾构刀盘驱动液压系统故障及时有效的诊断是保障盾构掘进过程安全可靠运行的重要环节。以天津轨道交通φ6 450 mm土压平衡盾构刀盘驱动液压系统作为仿真实验模型进行研究,结果表明: 在盾构液压系统诊断方面,变量加权主元分析模型(VW-PCA)相比于传统的主元分析模型(PCA)具有更高的准确率,诊断效果更佳。
将变量加权与主元分析算法模型结合起来,能够成功实现盾构刀盘驱动液压系统的故障诊断,降低故障的漏报率。但VW-PCA诊断模型仅能判断出液压系统是否发生故障,而无法判断出液压系统的具体故障类型。为完善盾构刀盘驱动液压系统故障诊断方法的研究理论,应在此基础上进一步研究液压系统故障类型的识别方法。
[1] 刘保杰, 杨清文, 吴翔. 液压系统故障诊断技术研究现状和发展趋势[J]. 液压气动与密封, 2016(8): 68.
LIU Baojie, YANG Qingwen, WU Xiang.Current research and development trend of fault diagnosis technology for hydraulic system[J].Hydraulics Pneumatics & Seals, 2016(8): 68.
[2] TAO X C, LU C, LU C, et al. An approach to performance assessment and fault diagnosis for rotating machinery equipment[J]. EURASIP Journal on Advances in Signal Processing, 2013(1): 1.
[3] JIA D Q, SHI B H. Research of shield machine fault prediction system based on improved Elman network algorithm[C]// Proceedings of the 33rd Chinese Control Conference. Shanghai:[s.n.], 2014.
[4] 黄克, 赵炯, 周奇才, 等. 基于多变量统计过程监控的盾构故障诊断[J]. 中国工程机械学报, 2012, 10(2): 222.
HUANG Ke, ZHAO Jiong, ZHOU Qicai, et al. Fault diagnosis on shield machines based on multivariable statistical process monitoring[J]. Chinese Journal of Construction Machinery, 2012, 10(2): 222.
[5] 文巧钧. 基于状态空间模型的复杂动态过程监测方法研究[D]. 杭州: 浙江大学, 2015.
WEN Qiaojun. State space model based approaches for complex dynamic process monitoring[D]. Hangzhou: Zhejiang University, 2015.
[6] 李卫东. 应用多元统计分析[M]. 北京: 北京大学出版社, 2015.
LI Weidong. Applied multivariate statistical analysis[M]. Beijing: Peking University Press, 2015.
[7] 高会, 李彦平. 基于残差主元分析的多变量系统故障诊断方法及应用[J]. 沈阳大学学报(自然科学版), 2016, 28(2): 141.
GAO Hui, LI Yanping. Multivariate system fault diagnosis methods and its applications based on residual principal component analysis [J].Journal of Shenyang University (Natural Science), 2016, 28(2): 141.
[8] BAKDI A, KOUADRI A, BENSMAIL A. Fault detection and diagnosis in a cement rotary kiln using PCA with EWMA-based adaptive threshold monitoring scheme[J]. Control Engineering Practice, 2017, 66: 64.
[9] 何小斌. 基于统计学方法的自适应过程监控与故障诊断[D]. 上海: 上海交通大学, 2009.
HE Xiaobin. Adaptive process monitoring and fault diagnosis based on statistical methods[D]. Shanghai: Shanghai Jiao Tong University, 2009.
[10] TRENDAFILOV N T, JOLLIFFE I T. DALASS: Variable selection in discriminant analysis via the LASSO[J]. Computational Statistics & Data Analysis, 2007, 51(8): 3718.
[11] 朱志洁, 张宏伟, 韩军, 等. 基于PCA-BP神经网络的煤与瓦斯突出预测研究[J]. 中国安全科学学报, 2013, 23(4): 45.
ZHU Zhijie, ZHANG Hongwei, HAN Jun, et al. Prediction of coal and gas outburst based on PCA-BP neural network[J]. China Safety Science Journal, 2013, 23(4): 45.
[12] 陶建峰, 刘成良. 全断面岩石隧道掘进机液压技术研究现状[J]. 液压与气动, 2015(6): 1.
TAO Jianfeng, LIU Chengliang. Review of technical research for hydraulic system of tunnel boring machine[J]. Chinese Hydraulics & Pneumatics, 2015(6): 1.
[13] 李喜莲. 盾构刀盘驱动液压系统及其功率自适应控制方法研究[D]. 杭州: 浙江大学, 2007.
LI Xilian. Hydraulic system for cutterhead of shield based on self-adaptive power control method[D]. Hangzhou: Zhejiang University, 2007.
[14] ZHANG L, WU X, SKIBNIEWSKI M J. Simulation-based analysis of tunnel boring machine performance in tunneling excavation [J]. Journal of Computing in Civil Engineering, 2015, 30(4): 3.
[15] 杨华勇, 赵静一. 土压平衡盾构电液控制技术[M]. 北京: 科学出版社, 2013.
YANG Huayong, ZHAO Jingyi. Electro-hydraulic control technology for EPB shield [M]. Beijing: Science Press, 2013.
