畸形波作用下二阶波浪载荷对张力腿平台动力响应的影响
2018-02-27唐友刚曲晓奇
李 焱, 唐友刚, 王 宾, 曲晓奇
(1. 天津大学 建筑工程学院, 天津 300072; 2. 天津大学 水利工程仿真与安全国家重点实验室, 天津 300072)
研究表明我国南海海域可能出现畸形波,因此对于南海油气资源开发结构的设计与研究中,研究畸形波的作用和影响是重要的。近期研究表明,畸形波对于张力腿平台结构的运动响应具有较大影响[1],因此深入研究畸形波对于张力腿平台的作用机理,揭示畸形波对于张力腿平台的不利影响,具有重要理论和工程意义。
对于畸形波的研究,大量的工作被投入到了畸形波的生成与预报方面,各学者开发出多种生成畸形波的数值方法,并针对不同方法生成畸形波的效率进行对比[2-6]。此外,国内外很多学者也针对TLP(Tension Leg Platform)平台在规则波及随机波条件下的动力响应进行了一系列研究[7-9]。但针对张力腿平台在畸形波作用下的响应研究并不是很多,谷家扬等[10]采用了改进的相位角调制方法生成了畸形波,将该畸形波作用下张力腿平台的运动响应及各张力腿的动力响应特性,并将畸形波与随机波作用下系统的动力响应特性进行了对比,但其对于大浮体波浪采用的是修正的莫里森公式,并且计算采用准静态方法,忽略了张力腿的惯性力。肖鑫等[11]采用三维势流理论计算了张力腿平台的水动力系数,并结合基于新波理论生成的畸形波波形对张力腿平台进行了动力分析,但其仅计算了平台的一阶波浪载荷,并未对二阶波浪载荷进行考虑。
本文针对在畸形波作用下的张力腿平台所受波浪载荷及平台运动特性进行研究。首先基于Longuet-Higgins波浪模型,将波浪谱离散成多个频率,对其中一部分波浪频率采用改进的相位调制法生成畸形波的波面升高,再结合由三维势流理论计算得到的张力腿平台的水动力系数,采用时域分析方法建立张力腿平台运动方程,在时域内计算平台所受一阶、二阶和频及二阶差频波浪载荷,进而采用数值方法求解平台的运动响应,研究张力腿平台在畸形波作用下的动力特性。
1 畸形波的模拟
对于畸形波的模拟,通常采用的办法有非线性方法和线性方法两大类,其中非线性方法大都用于研究波浪非线性调制的不稳定性,但其计算繁琐且工作量大,不适于工程实际应用及实验室模拟造波。相比而言基于Longuet-Higgins模型的线性叠加方法较为简便快捷,生成波形稳定,同时也是实验室模拟造波的常用方法。
1.1 Longuet-Higgins模型
假定沿x轴正向传播的长峰不规则波波面升高可以看做由大量规则波单元元素叠加组成,即
(1)
式中:对于每一个规则波元素,an为该波浪成分的波幅;ωn为其圆频率;kn为其波数;εn为随机的相位角;N为单元波数量。波幅an可由波浪能量谱表达,即
(2)
式中:Δωn为相邻两个波浪成分的频率间隔;Sη为波浪谱的谱密度函数。实验室中通常采用这种方法对随机波浪进行模拟。
1.2 畸形波的判定条件
与随机波浪相比,畸形波浪是在某个时刻某个位置某个时刻波浪能将集中而形成的,若采用随机波浪的生成方法生成畸形波效率十分低下,因此通常采用一些特殊的数值方法,对畸形波进行模拟。通常采用的方法包括相位调制法、随机波加瞬态波等多种方法。
1987年Klinting等[12]首先提出了畸形波的定义,认为畸形波的波形应满足如下3个条件:
(1) 畸形波的波高与有义波高的比值不小于2,即Hmax/Hs≥2
(2) 畸形波的波峰高与波高比值不小于0.65,即ηc/Hmax≥0.65
(3) 畸形波与前后相邻的波峰高的比值不小于2,即Hmax/H1≥2,Hmax/H2≥2
但多数学者认为该定义过于严苛,通常仅取(1)作为判定条件。本文将3个条件均作为判定条件。
1.3 随机频率相位角调制法
研究发现,采用相位角调制方法结合Longuet-Higgins方法可以较为方便地生成畸形波,但采用传统相位角调制法生成的畸形波,易出现伪随机性,同时存在波能分布不均的弊端。因此在本文的模拟中,采用改进的随机频率相位角调制法[13]对畸形波进行模拟,具体方法如下:

采用洗牌算法,将频率向量打乱顺序并分成随机分成两组A和B,数量分别为M1和M2,M1+M2=M。对A组中的M1个圆频率,采用复数形式计各频率对应的波面升高
ηi=aiexp[i(kx+ωit+φi)]
(3)
式中:k为波数;φi为该单元波对应的随机初始相位角,服从[0,2π]的均匀分布。对B组中的M2个频率相位角调制方法,调制各频率对应的初始相位角φj,使其在xc位置、tc时刻对应的相位角位于[0,π/2]内,即(kxc+ωjtc+φj)∈[0,π/2],并记其波面升高为
ηj=ajexp[i(kx+ωjt+φj)]
(4)
因此,复数形式下的波面升高时历为


(5)
取其实部即可得到在xc位置、tc时刻发生畸形波的波面升高时历,即

(6)
2 TLP运动方程
TLP示意图和运动坐标系分别如图1和图2所示。OXYZ为空间固定坐标系,O点位于平台处于静平衡位置时的重心处,OXY与静水面平行。GX′Y′Z′为随TLP一起运动的直角坐标系,G为TLP的重心。在初始时刻,OXYZ与GX′Y′Z′重合。

图1 TLP示意图
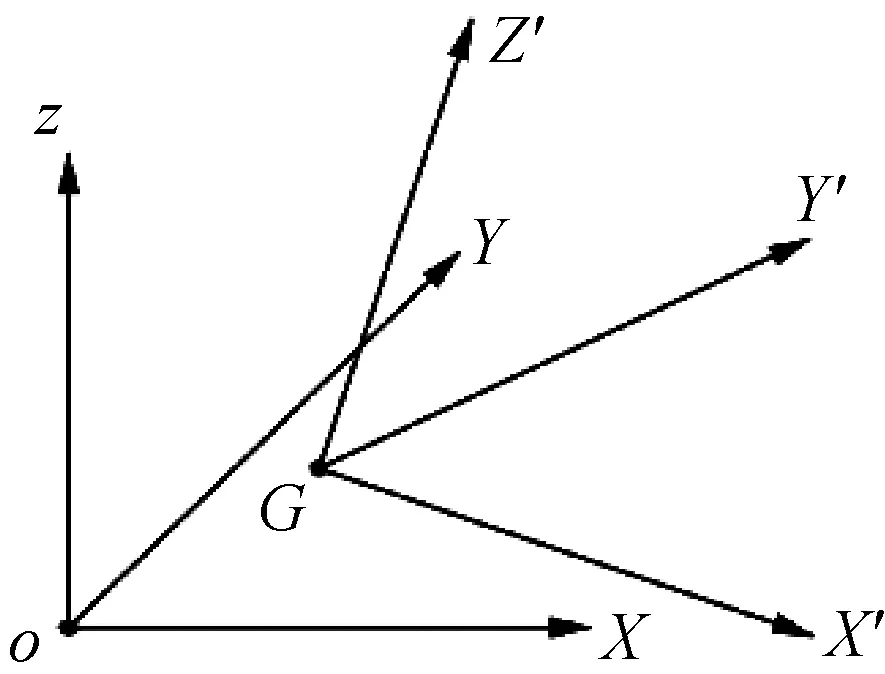
图2 坐标系
2.1 时域运动方程
对于海上系泊浮式结构物,浮体的运动方程可以写作

(7)

由于基于三维势流理论水动力软件计算得到的附连水质量和势流阻尼和频率相关,但在非规则波条件下,波浪频率成分复杂,无法确定直接将某一频率对应的附连水质量及势流阻尼用于时域方程计算,为此采用卷积积分的方法将随频率变化的附连水质量和势流阻尼转化为迟滞函数进行计算,得到TLP运动控制方程

(8)
式中:h(t)为迟滞函数按照如式(9)计算
(9)
式中:A∞为频率趋向于无穷大时,浮体的附加质量矩阵;C∞为频率趋向于无穷大时,浮体的势流阻尼矩阵。
2.2 张力腿系泊恢复力
王宾等基于张力腿平台的下沉运动推导了张力腿对于平台6自由度运动的恢复刚度矩阵。本文采用该方法,计算张力腿提供的恢复刚度,并将其以恢复力的形式加入平台运动时域方程右端载荷项,进行耦合时域分析计算,详细推导过程见参考文献[14]。张力腿提供的系泊恢复力Ftendon可以写作为
Ftendon=KX
(10)
式中:X=[δx,δy,δz,φ,θ,ψ]T,为张力腿平台的6自由度运动;K为参考点为重心G的刚度矩阵,可由位移转换矩阵T将平台底部中心P的刚度矩阵KP转换得到,即
K=TTKPT
(11)
KP表达式如下所示
(12)
刚度矩阵中各项具体表达式为
(13)
式中:T为所有张力腿的预张力之和;U为平台处于静止状态时受到的浮力;Q为平台结构所受的重力;ρ为水的密度;g为重力加速度;AW为平台立柱的水线面面积;L为张力腿的长度;Lz为各张力腿顶端距离海底基础的平均垂向距离;E为张力腿弹性模量;A为张力腿截面面积之和;Ix、Iy分别为平台对x轴、y轴的惯性矩;Ixx、Iyy分别为张力腿系统对x轴、y轴的截面惯性矩;zB为浮心B垂向坐标;zE为张力腿顶部端点E垂向坐标;zG为平台重心G垂向坐标;r为平台本体底部中心P到张力腿顶部端点E的距离;δs为平台下沉量,可以表达为
(14)
2.3 随机波浪载荷
采用三维势流理论在频域内计算张力腿平台的水动力载荷传递函数。一阶波浪力传递函数为LTF(Linear Transfer Function),记为F1(ω),二阶波浪力传递函数为QTF(Quadratic Transfer Function),其中包括和频波浪力传递函数F2s(ω,ω)以及差频波浪力传递函数F2d(ω,ω)。在畸形波η作用下,平台所受的一阶及二阶和、差频波浪载荷时历分别为
(15)

(16)

(17)
3 数值计算
3.1 张力腿平台模型参数
选取一个典型的四立柱式张力腿平台“ISSC”作为计算模型,该平台主要参数如表1所示。
3.2 畸形波的数值模拟与计算工况
对于海洋工程结构物的时域动态分析,为满足各态历经性的要求,通常进行3 h的数值模拟。由于畸形波是一个瞬态的响应,因此不需要进行3 h的时域模拟,模拟时长取为2 500 s。以我国南海50年1遇海况为基准,采用本文所述的随机频率相位角调制法生成多组畸形波波面升高时历,选取其中满足畸形波判定条件的时历结果进行张力腿平台的动力分析,畸形波发生附近时刻的波面升高时历如图3所示,畸形波参数如表2所示。

表1 ISSC平台主要参数[15]

表2 畸形波主要参数
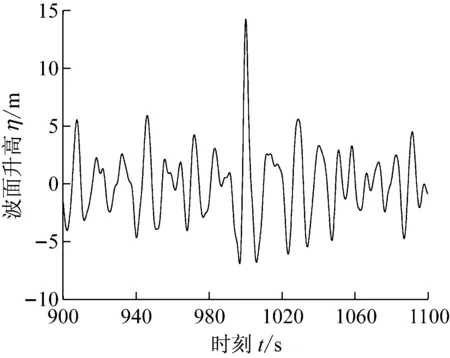
图3 畸形波波面时历
对于张力腿平台这种半固定半顺应式的平台,根据系泊系统提供的刚度不同,6自由度运动主要分为以横荡、纵荡为代表的低频运动以及以垂荡、横摇及纵摇为代表的高频运动。虽然波浪频率均远离这些自由度的固有周期,但二阶差频力与二阶和频力的周期分别与某些自由度运动的固有周期接近。为研究畸形波对不同成分波浪载荷成分及张力腿平台运动的影响,按照二阶波浪载荷成分的不同,分为以下4种工况分别进行研究,如表3所示。
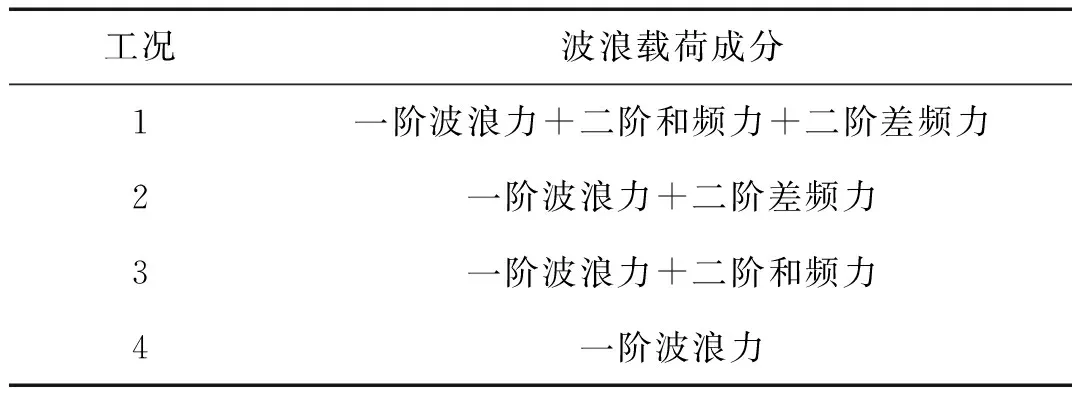
表3 工况定义
3.3 畸形波作用下张力腿平台的动力响应
根据前文叙述的方法,建立张力腿平台系统耦合动力分析模型,并编制程序计算畸形波条件下平台运动响应。各工况下畸形波发生时刻张力腿平台运动幅值如表4所示。由于张力腿平台各自由度运动固有频率并不完全相同,因此不同波浪载荷成分对于不同运动的影响并不相同,故针对纵荡、纵摇、垂荡及下沉运动分别进行分析,各自由度固有周期如表5所示。
3.3.1 纵荡运动
畸形波发生时刻,各工况下张力腿平台纵荡的运动时历曲线如图4所示,该自由度上平台所受的一阶与二阶波浪载荷如图5所示。从图5中可以看出在畸形波作用下,平台在纵荡自由度上所受的二阶和频力增幅最为显著,且与其他两种载荷成分相比,二阶和频力的幅值更大,但从图4中可以看出,仅考虑一阶波浪力与二阶和频力时,纵荡的运动并未发生显著的增大,而考虑二阶差频波浪载荷的两种工况纵荡运动幅值发生了非常明显的增大。因此可以认为在畸形波作用下二阶差频波浪载荷是引起张力腿平台大幅纵荡运动最主要因素。二阶和频载荷的幅值虽然大,但从表5中可以看出,载荷频率远高于纵荡的运动固有频率,因此并未引发纵荡运动的显著增加。

表4 畸形波时刻平台运动幅值
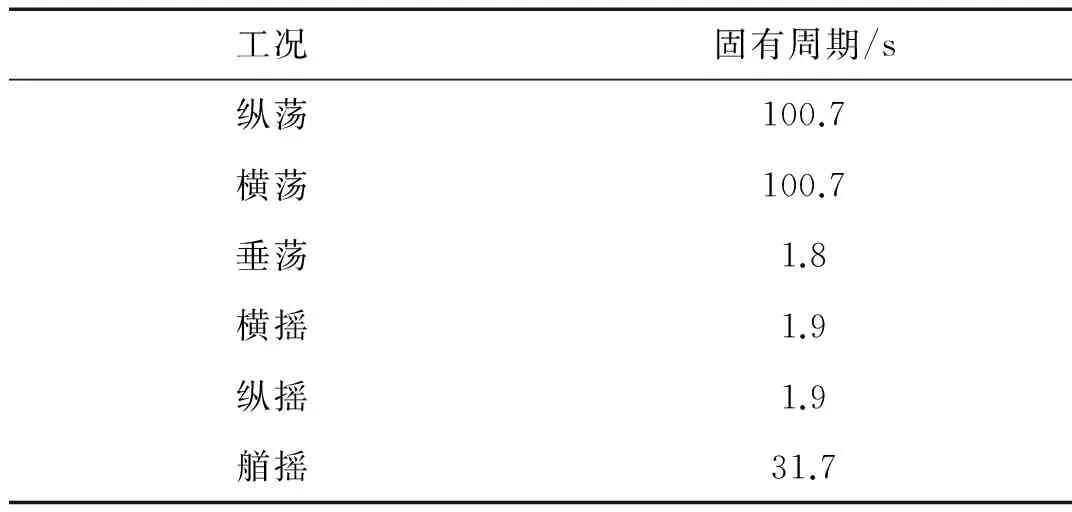
表5 平台运动固有周期
从图4中还可以看出,当考虑二阶差频波浪载荷的情况下,运动的幅值并非出现在畸形波发生的瞬间,而是滞后于畸形波发生。由于畸形波瞬态的特性,作用在张力腿平台上的波浪载荷可以被看作冲击载荷。当冲击载荷作用下,运动幅值可能发生在强迫振动阶段或自由振动阶段。研究表明,结构固有频率与冲击载荷脉冲频率之间的关系是决定运动幅值出现在哪个阶段的关键因素[16]。由于张力腿平台系统在纵荡自由度的固有频率低于畸形波波浪载荷的频率,因此最大的响应出现在畸形波衰减之后的阶段。

图4 纵荡运动时历曲线

图5 纵荡自由度上波浪载荷时历
3.3.2 纵摇运动
畸形波发生时刻,各工况下张力腿平台纵摇的运动时历曲线如图6所示,该自由度上平台所受的一阶与二阶波浪载荷如图7所示。从图7中可以看出,畸形波发生时刻纵摇自由度上一阶波浪载荷变化最为显著,并且从图6中也能看出一阶载荷增大对纵摇运动的影响,在仅考虑一阶波浪载荷的工况下,畸形波发生时刻平台纵摇运动增大。但与之相比,在考虑二阶和频载荷的两种工况下,平台纵摇幅值的增大更为显著,运动最小值甚至达到了仅考虑一阶载荷情况下的两倍,因此可以认为二阶和频载荷是引发张力腿平台纵摇运动显著增大的因素。
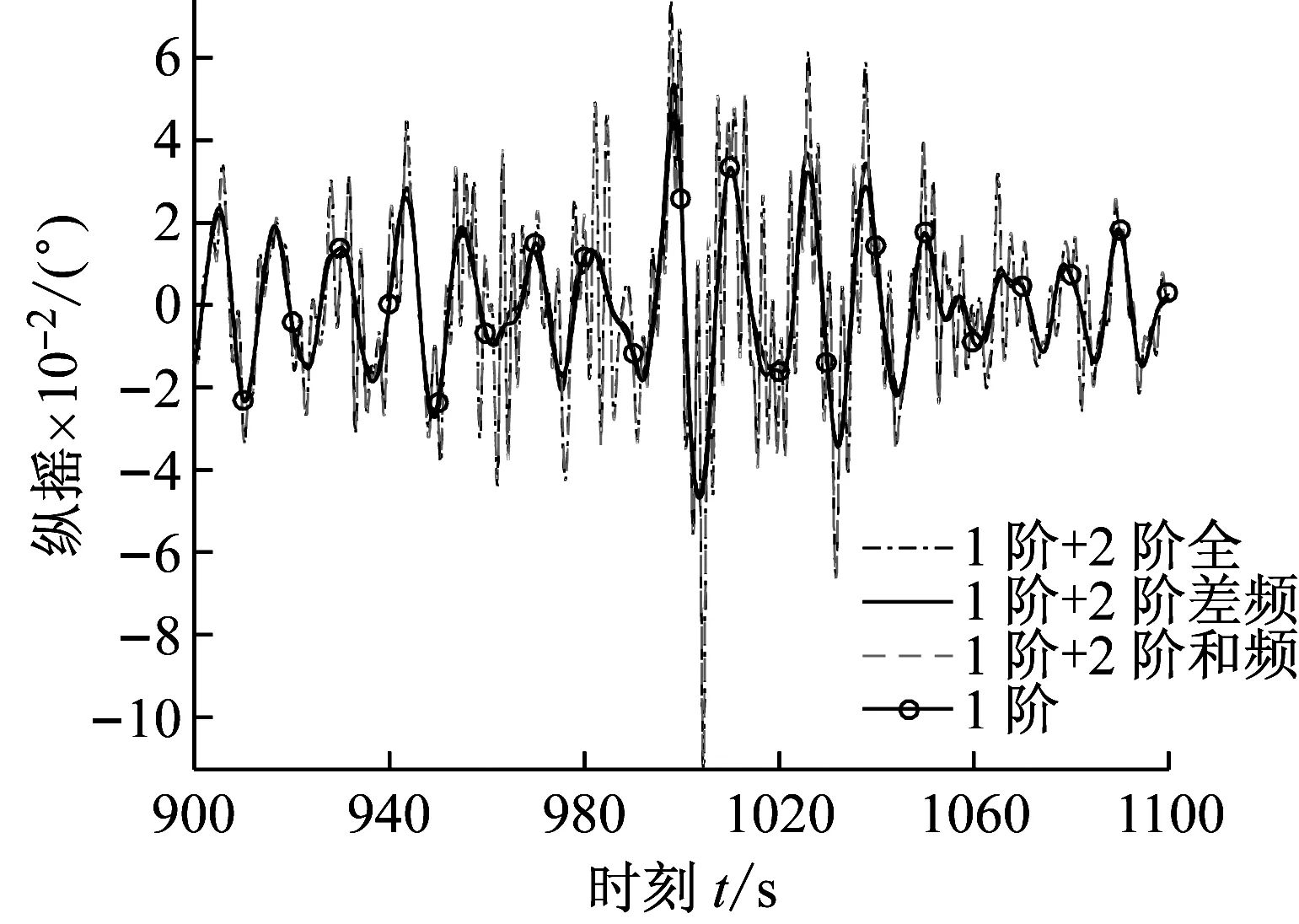
图6 纵摇运动时历曲线
此外,在畸形波发生之前的时刻纵摇运动的幅值可以看出,二阶和频载荷同样对运动的幅值产生了较为显著的影响。与二阶和频载荷相比,二阶差频载荷对于纵摇运动的影响相对较小,这是由于张力腿预张力较大,对纵摇方向提供了较大的恢复刚度,使得纵摇的固有频率较大,而二阶和频载荷频率与之相近,引发了平台产生较大的纵摇运动,且由于纵摇固有频率相对较高,与畸形波波浪载荷频率相近,故最大响应出现在畸形波作用的时刻。
3.3.3 垂荡运动及下沉运动
畸形波发生时刻,各工况下张力腿平台垂荡的运动时历曲线如图8所示,该自由度上平台所受的一阶与二阶波浪载荷如图9所示。与纵摇情况相类似,畸形波对于垂荡自由度上的一阶波浪载荷影响最为显著,在仅考虑一阶载荷工况中,畸形波发生时刻平台垂荡运动增大,同时考虑一阶波浪载荷与二阶和频载荷情况下,平台垂荡运动进一步增大。这也是由于张力腿系统较大的预张力使得垂荡自由度上恢复刚度较大,使得垂荡固有频率相对较大,导致该运动幅值出现在畸形波发生时刻。
但与纵摇运动不相同的是,在考虑二阶差频波浪载荷的工况下,平台垂荡运动的幅值更大,且幅值出现时刻滞后于畸形波发生时刻,这一情况与张力腿平台纵荡自由度的响应相似。其原因在于张力腿平台的系泊型式会导致平台垂荡与横荡、纵荡等水平面内的运动发生耦合,即当平台作大幅水平运动时,平台浮体会发生下沉运动。在畸形波条件下,二阶差频载荷引发了张力腿平台在水平面内的大幅度运动,从而使得平台在垂荡自由度上产生了大幅度的下沉运动。根据式(14)平台下沉运动计算方法,计算畸形波发生时刻各工况下张力腿平台的下沉运动如图10所示。图11为同时考虑一阶波浪载荷与二阶和、差频波浪载荷的情况下,平台垂荡运动与下沉运动的对比。可以看出,在畸形波条件下,垂荡运动幅值的增大很大程度上是由下沉运动的增大引起的。
4 结 论
本文采用随机频率相位角调制法模拟生成了畸形波,并将生成的畸形波作为输入,采用时域分析方法计算了在该畸形波作用下张力腿平台所受的一阶及二阶波浪载荷,分析了不同波浪载荷成分对于平台运动的影响,结果表明:
(1) 以纵荡为代表的水平面内运动自由度上,畸形波使得二阶和频波浪载荷的幅值增大最多,但其对于该自由度运动影响并不显著,畸形波对于纵荡运动的影响主要通过二阶差频波浪载荷体现。

图8 垂荡运动时历曲线

图9 垂荡自由度上波浪载荷时历
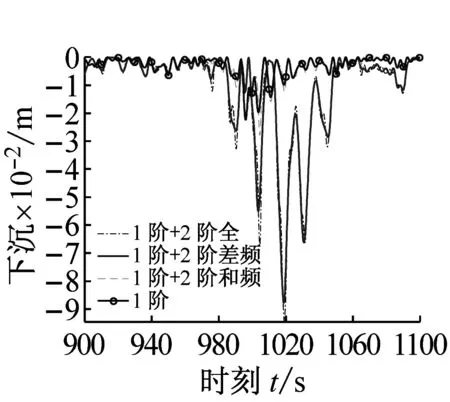
图10 下沉运动时历曲线

图11 工况一的垂荡与下沉运动对比
(2) 在平台纵摇运动上,畸形波对于一阶波浪载荷的影响最为明显,而一阶波浪载荷的增大在一定程度上引起了平台纵摇运动的增大,但二阶和频载荷对于平台纵摇运动的影响更为显著,在畸形波发生时刻平台产生了较大的纵摇运动。因此在畸形波条件下二阶和频波浪载荷是引起张力腿平台纵摇运动增大的最主要因素。
(3) 在平台的垂荡运动上,畸形波同样对于一阶波浪载荷的影响最为显著,一阶载荷及二阶和频载荷均一起了平台垂荡运动的增大,但由于平台运动耦合,在畸形波条件下,垂荡运动幅值的增大在很大程度上是由下沉运动的增大引起的。因此在畸形波条件下一阶与二阶和、差频波浪载荷均是引发平台垂荡幅度增大的因素。
(4) 由于畸形波的冲击特性,张力腿平台不同自由度运动幅值出现时刻并不相同,纵荡幅值滞后于畸形波时刻出现,纵摇运动幅值在畸形波发生时刻出现,而垂荡运动在畸形波发生时刻与之后均有较大幅度运动。
[1] RUDMAN M, CLEARY P W. Rogue wave impact on a tension leg platform: the effect of wave incidence angle and mooring line tension[J]. Ocean Engineering, 2013, 61(6):123-138.
[2] EL-BEDWEHY N A. Freak waves in GaAs semiconductor[J]. Physica B Condensed Matter, 2014, 442(3):114-117.
[3] SLUNYAEV A. Nonlinear analysis and simulations of measured freak wave time series[J]. European Journal of Mechanics - B/Fluids, 2006, 25(5):621-635.
[4] ZAKHAROV V E, DYACHENKO A I, PROKOFIEV A O. Freak waves as nonlinear stage of Stokes wave modulation instability[J]. European Journal of Mechanics-B/Fluids, 2006, 25(5):677-692.
[5] HU Z, TANG W, XUE H. A probability-based superposition model of freak wave simulation[J]. Applied Ocean Research, 2014, 47(9):284-290.
[6] HU J, ZHANG Y. Analysis of energy characteristics in the process of freak wave generation[J]. China Ocean Engineering, 2014, 28(2):193-205.
[7] 秦尧, 唐友刚, 王臻魁. 考虑平台本体-张力腿-基础耦合的TLP平台动力特性分析[J]. 中国造船, 2013, 54(4): 63-70.
QIN Yao, TANG Yougang, WANG Zhenkui. Study on dynamic characteristics of TLP with consideration of platform-tension leg-foundation coupling[J]. Shipbuilding of China, 2013, 54(4): 63-70.
[8] RAO D S B, SELVAM R P, SRINIVASAN N. Experimental investigations on tension based tension leg platform (TBTLP)[J]. Journal of Naval Architecture and Marine Engineering, 2014, 11(2): 105-116.
[9] CHANDRASEKARAN S, KUMAR D, RAMANATHAN R. Response control of TLP using tuned mass dampers[C]//ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering. San Francisco:ASME,2014.
[10] 谷家扬, 吕海宁, 杨建民. 畸形波作用下四立柱张力腿平台动力响应研究[J]. 海洋工程, 2013, 31(5): 25-36.
GU Jiayang, LÜ Haining, YANG Jianmin. Dynamic response study of four column TLP in freak waves[J]. The Ocean Engineering, 2013, 31(5): 25-36.
[11] 肖鑫, 滕斌, 勾莹, 等. 畸形波作用下张力腿平台的瞬时响应[J]. 水运工程, 2009(5): 9-14.
XIAO Xin, TENG Bin, GOU Ying, et al. Transient response of TLP under freak waves[J]. Port & Waterway Engineering, 2009(5): 9-14.
[12] KLINTING P, SAND S E. Analysis of prototype freak waves[C]∥ASCE Special Conference Nearshore Hydrodynamics. [S.l.]:ASCE, 1987.
[13] TANG Y G, LI Y, WANG B, et al. Dynamic analysis of turret-moored FPSO system in freak wave[J]. China Ocean Engineering, 2016, 30(4):521-534.
[14] 王宾, 唐友刚, 李焱,等. 考虑下沉运动情况下的张力腿平台耦合动力响应[J]. 中国造船, 2015(4):68-77.
WANG Bin, TANG Yougang, LI Yan, et al. Dynamical coupled response of tension leg platform considering set-down motion[J]. Shipbuilding of China, 2015(4):68-77.
[16] 唐友刚. 高等结构动力学[M]. 天津:天津大学出版社, 2002: 24-25.
