一种基于小波变换的氢铯联合守时算法研究∗
2018-02-27宋会杰董绍武4姜萌王燕平漆溢屈俐俐
宋会杰董绍武4姜萌王燕平漆溢屈俐俐
(1中国科学院国家授时中心西安710600)
(2中国科学院时间频率基准重点实验室西安710600)
(3中国科学院大学北京100049)
(4中国科学院大学天文与空间科学学院北京100049)
1 引言
氢原子钟和铯原子钟是守时中最常用的高精度频率标准,不同类型的原子钟在时间保持中有各自的优势[1].众所周知,氢原子钟的优势在于其短期稳定度高,铯原子钟的优势在于其长期稳定度高,文献[1]利用氢原子钟具有高短期稳定度的特点,用做测量铯原子钟噪声的参考,通过数学方法滤波铯原子钟的噪声建立时间尺度,并且指出氢原子钟需扣除速率和频率漂移后参加原子时尺度计算.文献[2]利用铯原子钟建立的参考时间尺度修正某台氢原子钟的速率和频率漂移,并将其用于守时.文献[3]通过氢原子钟扣除速率和频率漂移,铯原子钟扣除频率,然后通过加权平均计算时间尺度用于驾驭氢钟.分析以上研究成果,氢原子钟为参考测量铯原子钟的噪声主要是相位白噪声,滤波后时间尺度的短期稳定度很大程度还是受铯原子钟噪声的影响.通过铯原子钟建立参考时间尺度修正某台氢原子钟,当氢原子钟出现异常时,将不能产生可靠的时间尺度.鉴于此,本文根据原子钟的可预测性算法[4],利用铯原子钟建立的参考时间尺度扣除氢原子钟的速率和频率漂移,然后通过氢原子钟建立原子时尺度,目的是充分利用铯原子钟的长期稳定度和氢原子钟的短期稳定度,其中文献[5–7]对参与计算的氢原子钟的性能进行过分析.对于时间尺度算法的钟差测量部分,文中通过小波变换进行多尺度分析,计算小波方差并进行多尺度加权,此方法同时降低了钟差部分多种噪声的影响,进一步提高了时间尺度的稳定度[8−10].对于算法中氢原子钟的取权,文献[11–13]采用了Kalman增益矩阵加权方法,考虑了原子钟的短期稳定度,文中兼顾原子钟的长期稳定度同时考虑了滤波取权方法[14].
2 原子钟的可预测性算法
原子钟可预测性算法是基于钟的可预测性,一台好的钟是一台可预测的钟[15−16].可预测性算法表明:如果可以很好地预测原子钟的稳定性特征,比如频率漂移和老化率,这样既不会影响时间尺度的长期稳定性,同时又能够充分发挥中短期稳定性好的钟的性能,对于时间区间Ik(tk,tk+1),原子钟预测项描述为二次项形式:

其中,i表示钟,ai,Ik(tk)为tk时刻原子钟的时差,Bip,Ik(t)为[tk,t]时间段原子钟的速率,Cip,Ik为[tk,t]时间段原子钟的频率漂移,(1)式的估计式可表示为[4]


根据区间Ik(tk,tk+1)的钟差数据计算得到钟i相对于时间尺度的差xi(t),根据公式计算得到.表示Ik时间区间的速率预报值,计算公式为,其中通过(2)式计算得到.
考虑到近期的测量相对于过去的测量具有更可靠的统计特性,单台原子钟的频率稳定度表示为[11]

其中,j表示计算区间,M是区间的数目.j=1表示当前计算区间,j=2表示前一计算区间,依次类推,j=M表示最前计算区间.相应的单台原子钟的权重表示为

实际计算中需要考虑原子钟的异常行为和权重的上限取值.
3 钟差的小波分解算法
钟差是一个非平稳的随机过程,为了能够合理地降低钟差包含的多种噪声,提高时间尺度的稳定度,利用小波变换算法降低钟差噪声的影响.每一个频率范围内,各台原子钟信号的幅度都不同,文中利用多分辨率加权的方法,对钟差做小波分解,提取出各个频率范围内的分量,用小波方差表征其频率稳定度,在不同的尺度加权平均,再重构信号.假设测量得到的第i个原子钟与主钟MC的钟差记为Di,MC(t),做小波分解得:


其中,N表示小波系数个数,表示钟i在小波分解尺度l的小波系数均值.因此在l尺度下,钟i的加权可以表示为


式中L表示原子钟的数目.
4 基于小波变换氢铯联合守时算法
4.1 氢原子钟的参数估计
通过铯原子钟建立的参考时间尺度估计氢原子钟的速率与频率漂移.假设由ALGOS算法得到的参考时间尺度记为TACs,根据TACs可估计氢原子钟的速率与频率漂移.对于区间Ik(tk,tk+1)上t时刻的第i台氢原子钟Hi与时间尺度TACs的时差表示为

tk时刻第i台氢原子钟Hi相对于TACs的时间改正估计表示为

区间Ik(tk,tk+1)上第i台氢原子钟Hi的速率估计表示为

对于氢原子钟的频率漂移估计,为了降低频率白噪声的影响,需要对氢原子钟速率数据进行平滑处理,氢原子钟的频率漂移估计表示为

4.2 基于小波变换的尺度算法
考虑时间尺度计算区间Ik(tk,tk+1),设参加计算的氢原子钟数为L,在某一时刻,第i台氢原子钟在时刻t的钟面读数为T(i,t),修正后的钟面读数可表示为

假设根据可预测性算法得到钟i在时刻t的权重为p(i),则小波分解原子时算法求得的小波时间尺度WDAT表示为

定义钟i与WDAT的差为

测量第i台与第m台原子钟的钟差为

钟差Di,m(t)可以由原子钟间的比对测量得到,选取原子钟性能比较好的为主钟,不妨设其为第L台原子钟.DWL(t)表示主钟相对于WDAT的时差.
根据上面的定义,我们有方程组:

通过测量,可以得到Di,L,表示主钟与各台原子钟的钟差值,根据方程(17)式可求得

(19)式给出了主钟与WDAT的差,把(19)式分为两项,第1项为L台原子钟时间修正值的加权平均,记为

(19)式的第2项表示为

5 算法性能分析
5.1 算法的实施步骤
利用NTSC(National Time Service Center)的多台原子钟与主钟的比对钟差数据,参与计算的原子钟编号分别为:HM226、HM227、HM296、HM297、Cs2959、Cs2962、Cs1011、Cs1016、Cs2964、Cs1018、Cs2573、 Cs3089、Cs2976、Cs3091、Cs3102、Cs2921和Cs2922.测量间隔为1 h,数据取样时间段为MJD 57388–MJD 57631,算法实施如下:
(1)根据铯原子钟与主钟的比对数据,采用ALGOS算法计算铯原子钟产生的时间尺度,计算周期为30 d.
(2)通过步骤(1)中产生的TACs,根据(11)–(13)式分别计算区间Ik(tk,tk+1)上的氢原子钟相对于TACs的时间改正估计,氢原子钟的速率估计和氢原子钟的频率漂移估计.
(3)利用小波变换对主钟与氢钟的钟差做多尺度分解,根据不同尺度的小波系数计算相应的小波方差,用小波方差表征其频率稳定度,确定相应尺度的权重,通过不同尺度的权重重构信号,计算钟差的加权平均.
(4)计算氢原子钟的权重,根据(3)–(5)式计算氢原子钟的权重,根据方程(19)式求解氢原子钟时间尺度DWL(t).
5.2 算法结果分析
根据5.1节所用的铯原子钟,采用ALGOS计算方法建立时间尺度TACs估计各台氢原子钟的速率与频率漂移,计算周期为30 d,估计结果如表1和表2所示,从表1可以看出:HM226、HM296和HM297的速率有一定的趋势,可预测性较好,HM227的速率趋势不是很明显.通过表2可以看出:HM226与HM227漂移不是很稳定,估计带来的不确定性大,这是由于这两台氢原子钟的运行年限较长,部件老化.HM296与HM297的漂移相对稳定,并且HM296的漂移较小.说明HM296是可预测性较好的钟,并且更易驾驭控制.表3为时间尺度计算过程中氢钟钟差不同尺度的小波取权,文中采用了“db6”小波函数进行4尺度分解,MC-HM296在不同尺度取权最高,MC-HM297除尺度1外,仅次于MC-HM296,表明MC-HM297的高频噪声相比于MC-HM296与MC-HM226较大.

表1 氢原子钟的速率估计Table 1 The rate estimations of hydrogen masers

表2 氢原子钟的漂移估计Table 2 The drift estimations of hydrogen masers

表3 钟差不同小波尺度的权重Table 3 The weights of different wavelet-scales of clock differences
根据5.1节算法的实施步骤,计算时间段MJD 57538–MJD 57626的时间尺度,计算周期为30 d,计算方法分别采用氢铯联合守时算法和基于钟差小波变换的氢铯联合守时算法,计算结果如图1与图2所示.从图中可以看出基于小波变换的氢铯联合守时算法计算得到的时间尺度噪声明显降低,为了具体比较两种算法计算得到的时间尺度的稳定度,文中采用TA(NTSC)为参考计算两种算法时间尺度的Allan偏差,计算结果如图3与表4所示.基于小波变换的氢铯联合守时算法计算得到的时间尺度短期稳定度明显优于氢铯联合守时算法,长期稳定度相比于氢铯联合守时算法提高不明显,原因在于基于小波变换的氢铯联合守时算法的钟差部分根据不同尺度的小波变换系数取权,降低了不同尺度下原子钟噪声的影响,提高了时间尺度的短期稳定度.对于原子钟长期趋势项取权,基于小波变换的氢铯联合守时算法与联合守时算法都是根据原子钟的可预测性.

图1 基于氢铯联合守时算法的时间尺度Fig.1 The time scale of joint algorithm based on hydrogen masers and cesium clocks
6 结论
氢铯联合守时是一种重要的时间保持方法.该方法主要根据氢原子钟优良的短期稳定度和铯原子钟优良的长期稳定度的特性,结合不同的算法产生稳定的时间尺度.本文主要研究了对钟差进行小波变换的氢铯联合守时算法.
基于小波变换的氢铯联合守时算法可以认为是在保证原子钟的长期稳定度的前提下,通过对钟差的小波分解、多尺度取权,降低了多种噪声的影响,提高了时间尺度的稳定度,初步结果表明:特别是短期稳定度提高明显,长期稳定度基本与氢铯联合守时算法一致.
同时,我们发现氢原子钟HM296和HM297的速率估计和频漂估计相比于HM226和HM227更具有可预测性,HM226与HM227的频漂不是很稳定,原因是这两台氢原子钟已经运行超过10 yr,钟性能可能有所变化.
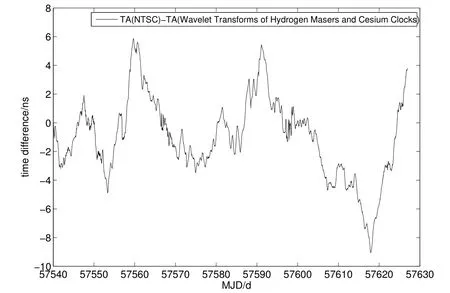
图2 基于小波变换的氢铯联合守时算法的时间尺度Fig.2 The time scale of joint algorithm of hydrogen masers and cesium clocks based on wavelet transforms
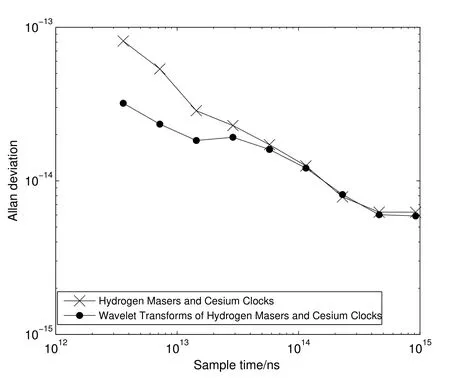
图3 两种算法相对于TA(NTSC)的Allan偏差Fig.3 The Allan deviation of two algorithms relative to TA(NTSC)

表4 两种算法Allan偏差的比较Table 4 Comparison of Allan deviations between these two algorithms
[1]Yuan H B,Qu L L,Dong S W,et al.Proceedings of IEEE Frequency Control Symposium,2009:639
[2]Shinn Y L,Hsin M P.Proceedings of IEEE Frequency Control Symposium,2007:893
[3]Suman S,Pascale D.Proceedings of Conference on Precision Electromagnetic Measurements,2010:454
[4]Gianna P,Aurelie H,Laurent T.Metro,2012,49:49
[5]宋会杰,董绍武,王正明,等.天文学报,2015,56:628
[6]Song H J,Dong S W,Wang Z M,et al.ChA&A,2016,40:569
[7]宋会杰,董绍武,李玮,等.天文学报,2017,58:19
[8]李孝辉,柯熙政,焦李成.陕西天文台台刊,2000,23:26
[9]李建勋,柯熙政,郭华.西安理工大学学报,2007,23:365
[10]Don P.Proceedings of Precise Time and Time Interval Meeting,2003:211
[11]Galleani L,Tavella P.Metro,2003,40:326
[12]Charles A G.Proceedings of Precise Time and Time Interval Meeting,2001:445
[13]Charles A G.Metro,2003,40:335
[14]Panfilo G,Harmegnies A,Tisserand L.Metro,2014,51:285
[15]Weiss M A,Allan D W,Peppler T K.ITIM,1989,38:631
[16]Levine J.RScI,1999,70:67
