一种小型AGV运输小车的设计
2018-02-18王书剑周诗薇邓文兵方凯
王书剑 周诗薇 邓文兵 方凯

【摘 要】在柔性制造业和自动化工厂中,自动导引运输车(AGV)具有运输效率高、节能、工作可靠、能实现柔性运输等许多优点。论文设计一种小型AGV运输小车,以32位微控制器MK60DN512VLQ10作为核心控制单元,采用电感线圈获取道路信息,通过PID控制算法调节速度控制器和方向控制器,实时调整小车的自动导向与转角。在柔性制造系统中,其可以提高生产自动化程度和生产效率,具有廣泛的应用前景。
【Abstract】In flexible manufacturing and automated plants, automatic guided transport vehicle (AGV) has many advantages, such as high transportation efficiency, energy saving, reliable work, flexible transportation and so on. The paper designs a small automated guided vehicle, which takes the 32-bit microcontroller MK60DN512VLQ10 as the core control unit, and adopts inductance coil to obtain the road information. The speed controller and the direction controller are adjusted by PID control algorithm, and the automatic steering and turning angle of the car are adjusted in real time. In the flexible manufacturing system, it can improve the degree of production automation and production efficiency, and has a wide application prospect.
【关键词】自动导引小车;电磁检测;路径识别;单片机控制;PWM技术
【Keywords】automatic guided vehicle; electromagnetic testing; path identification; single chip microcomputer control; PWM technology
【中图分类号】TP249 【文献标志码】A 【文章编号】1673-1069(2018)12-0176-02
1 引言
自动引导小车(AGV)是伴随着柔性加工系统、柔性装配系统、计算机集成制造系统、自动化立体仓库而产生并发展起来的自动化物流装备[1]。
随着企业对于大型设备以及产品的物流运输要求越来越严格,AGV的构造和功能也发生翻天覆地的变化。为了能够满足企业对于运输大型设备以及产品的需求,需要一种重载式AGV。重载式AGV运输小车有电磁或光学等自动导引装置,它能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,相比普通的AGV小车更为实用[2]。
2 设计任务
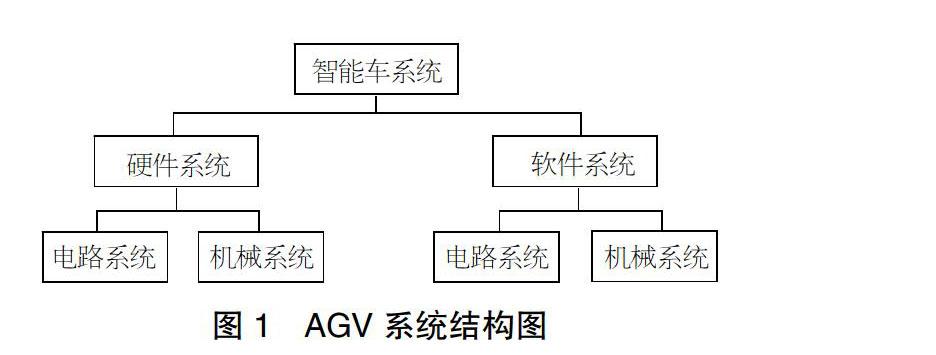
本课题设计了一种小型重载AGV运输小车,以32位微控制器MK60DN512VLQ10为核心控制单元,采用电感线圈获取道路信息,通过设计PID速度控制器和PID方向控制器实时调整AGV运输小车的自动导向与转角。系统结构如图1所示。
[智能车系统][硬件系统][软件系统][电路系统][机械系统][机械系统][电路系统]
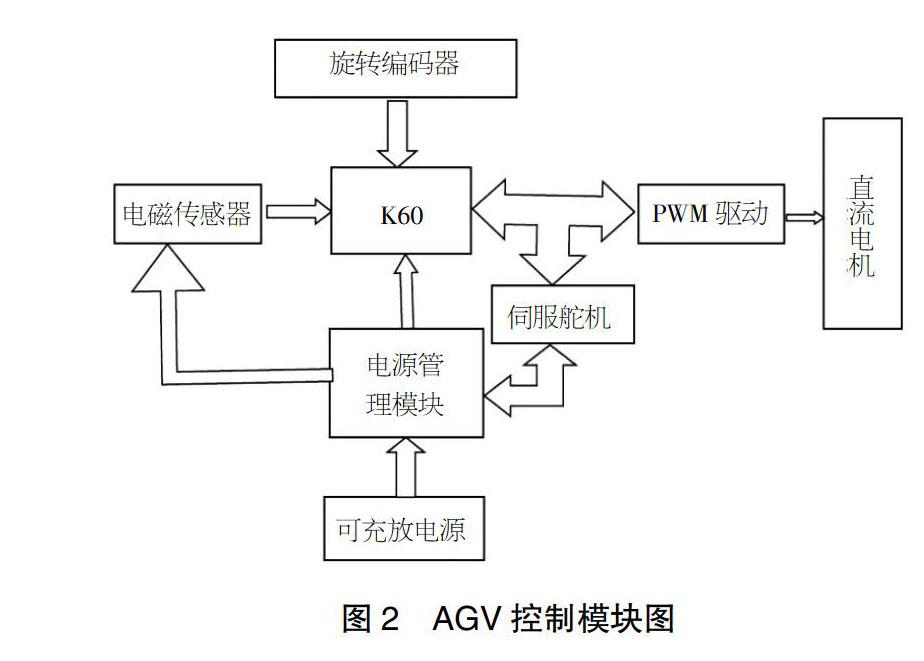
系统包括电磁传感器导引模块、核心控制K60模块、驱动模块、电源模块。控制功能模块如图2所示。
3 AVG运输小车的设计
3.1 控制系统
①电磁传感器导引模块:选用三极管和LM324芯片进行两级放大,在该模块中对采集到的信息进行处理,以此信息来判断当前AVG运输小车行车路径的变化趋势和AVG运输小车当前速度转角的信息[3]。将处理得到的信息传给单片机以决定相应控制决策。②核心控制K60模块:K60单片机是系统的核心部分。它负责接收行车路径信息数据,AGV运输小车的速度等反馈信息,并对这些信息进行恰当的处理,形成合适的控制量来驱动电机进行控制。③驱动模块:在该模块中包括了驱动电机和舵机,当接收到单片机的命令后执行相应的操作,同时信息采集模块又采集到电机和舵机的状态信息,反馈给单片机[4]。从而整个系统能够形成一个闭环,保证了AGV运输小车的准确导引。④ 电源模块:提供AVG小车运行中各个部件的动力。
3.2 机械平台
AVG运输小车的机械结构包括AVG运输小车车体、电磁导引传感器、编码器、舵机和电机。
①电磁传感器。电磁传感器主要考虑的问题有:固定电磁传感器的材料,安装位置和安装高度[5]。固定材料选择了硬度较好而且使用灵活的三通塑料连件。安装位置刚开始我们把传感器支架固定在车的前半部分,导致传感器支架摆动在高速是晃动,并使得小车重心靠前。经过多次反复的实验最终确定了传感器离地面的高度为11cm,支架固定在车体的后部。 ②速度编码器。采用龙邱编码器,安装时应注意调整好齿轮间隙。齿轮传动机构对车模的驱动能力有很大的影响。齿轮传动部分安装位置的不恰当,会大大增加电机驱动后轮的负载。调整的原则是:两传动齿轮轴保持平行,齿轮间的配合间隙要合适,过松容易打坏齿轮,过紧又会增加传动阻力,浪费动力;传动部分要轻松、顺畅,不能有迟滞或周期性振动的现象。判断齿轮传动是否良好的依据是,听一下电机带动后轮空转时的声音。声音刺耳响亮,说明齿轮间的配合间隙过大,传动中有撞齿现象;声音闷而且有迟滞,则说明齿轮间的配合间隙过小,或者两齿轮轴不平行,电机负载变大。调整好的齿轮传动噪音很小,并且不会有碰撞类的杂音,后轮减速齿轮机构就基本上调整好了。③小车车体。小车车体设计中,关键是重心的调整,包括重心高度的调整和前后的调整。重心的高度是影响小型重载AGV运输小车稳定性的因素之一。当重心高度偏高时,AGV运输小车在转弯过程中会不稳定。合理的底盘刚度和底盘高度调节会提高小型重载AGV运输小车的加速性能。AGV运输小车的重心应该保持较低,降低地盘是实现重心下降的较为直接的方式[6]。
3.3 程序设计
软件设计需要配置单片机各个模块寄存器数值,使单片机各个模块正常工作。初始化中包括:单片机时钟配置、I/O口配置、PWM模块配置、A/D模块配置、PIT实时中断配置、脉冲捕捉模块配置[7]。当初始化完毕后,开始对传感器输入信号进行采样,当完成一次采样后将采样值输入控制算法,控制算法经过PID调节,得到实际控制的电机速度,通过改变PWM模块内部寄存器数值可以得到不同占空比的方波信号,实现电机的调节与控制。
4 结论
本课题设计了小型重载AGV运输小车,是以微控制器为控制核心、蓄电池为动力、装有非接触导引装置的无人驾驶自动导引运输车,其自动作业的基本功能是导向行驶、认址停准和移交载荷。作为物流处理自动化的有效手段和柔性制造系统的关键设备,AGV自动导引小车系统结构一般由机械部分、控制部分以及信息处理部分构成。本设计实现了小车自动按设定的轨迹行走,能够在柔性制造系统中自动运输工件。
【参考文献】
【1】李铭.小型重载 AGV的设计与实验研究[D].西安: 西安理工大学, 2009.
【2】杨东轩,王嵩.ARMCortex-M4自学笔记:基KinetisK60[M].北京:北京航空航天大学出版社,2013.
【3】谭建成.电机控制专用集成电路[M].北京:机械工业出版社,1997.
【4】周文军, 吴有明.基于AGV和工业机器人的智能搬运小车的研究[J]. 装备制造技术, 2016(11):89.
【5】贺美华, 廖敏, 公茂震,等.装配型重载全向移动AGV控制系统[J]. 自动化技术与应用, 2018(2):66.
【6】卢敬铭.重载仓储自动引导车底盘的设计实现[D]. 广州:华南理工大学, 2017.
【7】贺修好,周威,方凯.一种模块化可变形搜救机器人的设计[J].卷宗,2015(5):88.