基于MBTLAB 的平面连杆机构的运动学分析
2018-02-14张惠阳孙钱森
张惠阳,孙钱森,陈 宁
(河南理工大学 机械与动力工程学院,河南 焦作 454000)
平面连杆机构的运动学分析方法主要有图解法和解析法,需要精确了解机构在整个运动循环过程中的运动特性时,需要采用解析法并借助计算机。解析法所使用的一般计算求解方法为——复数矢量法和矩阵法。这两种分析方法分析精度高,但是过程繁琐,难度较大。利用MBTLAB 求导运算功能进行计算求解,此方法可以简化计算过程,避免了大量的矩阵运算,简洁深刻,不易出错。压床执行机构是一种典型的连杆机构,其运动学分析具有很强的代表性。笔者利用MBTLAB 求导运算功能得到压床冲头的位移、速度、加速度随运动时间变化的规律,展示了平面连杆机构运动学基于MBTLAB 的分析方法。
1 基于MBTLAB 的压床执行机构运动学分析
如图1 所示,该压床执行机构是由曲柄连杆为基础拓展而成,通过低副连接形成的单自由度连杆机构。其工作过程可看作原动件l1杆以角速度w1=10π/3 做定轴转动,并且带动从动件杆l2、l3、l4做平面运动,最后再带动冲头沿导路做上下往复运动,实现冲压工艺。
2 位置分析
建立机构的封闭矢量位置方程组如下:
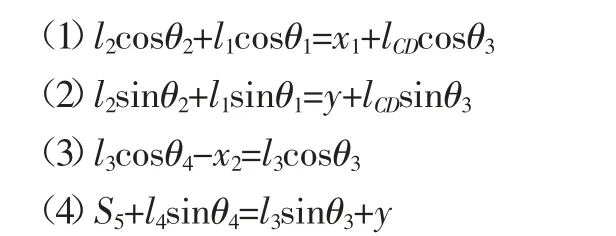
式中:θi为各杆矢量的方位角,i=1,2,3,4;S5为冲头的位移。
将式(1)(2)整理并化简可得:

式中:A=2lCD(y-l1sinθ1),B=2lCD(x1-l1cosθ1),C=lCD2-l22+(y-l1sinθ1)2+(x1-l1cosθ1)2

在求得θ3之后代入(2)(3)(4)即可求得连杆l2的方位角θ2,连杆l4的方向角θ4和冲头的位置S5。
3 速度分析
对于θ2、θ3、θ4、S5分别求对时间一次导数可得

式中:wi为各构件的角速度,rad/s,i=2、3、4,v5为冲头的速度,mm/s。
4 加速度分析
对于w2、w3、w4、v5分别求对时间一次导数可得

式中:αi为各构件的角加速度,rad/s2,i=2、3、4,α5为冲头的加速度,mm/s2。
5 冲头的运动线图
通过MATLAB 软件编程计算,分别得到冲头的位移、速度和加速度线图,如图1 所示。
其中冲头的位移极差为150 mm,速度变化范围为[-774.8,+860]mm/s(正号表示方向向上,反之表示方向向下),加速度变化范围为[-12939,+6781]mm/s2(正号表示与此时速度方向相同,反之表示与速度方向相反)。把该分析结果与文献[5]、[6]的结果相比较,证明了该分析结果的正确性,(由于l1初始方位角与文献[5]、[6]略不同,图像略有区别)分析过程与文献[4~6]相比较,用MBTLAB 求导运算分析效率更高,更加简洁。
6 结 语
本文以压床执行机构为例,探究了平面连杆机构的运动学分析。首先基于MBTLAB,对压床执行机构进行运动学分析,用解析法建立了压床执行机构的运动学各变量之间的关系,使用MBTLAB 编程,运用求导运算,求得冲头的运动特性。这种方法均简单高效,具有很强的优越性,可为其他类似的平面连杆机构运动学分析提供很好的借鉴。

图1 冲头的位移、速度、加速度图像
