基于多观测器的力反馈装置反向驱动补偿研究
2018-02-08吴洪涛徐梓菲
王 琰,吴洪涛,徐梓菲
(南京航空航天大学机电学院,江苏 南京 210016)
在力反馈系统中,为了保证反馈主手在具有紧凑结构的同时有较大的输出能力,通常会使用小功率电机配合大减速比的减速机。但是这样会引入较大的摩擦力,影响力反馈主手的反向驱动性能。同时,在操作者与环境目标进行交互的时候,由于摩擦力的存在会降低力传递的透明性,严重影响了力反馈效果。此外,主手运动部件的重力和惯性力也会影响反向驱动性。
为了提高力反馈交互过程中的传递透明性,需要对反向驱动阻力进行补偿。由于摩擦现象与材料的属性、接触条件及温度等多种因素有关,通常难以建立准确的摩擦模型[1]。文献[2]描述了几种不同的摩擦模型,包括静态模型与动态模型,需要注意的是在模型精度提高的同时,意味着需要辨识更多的参数。同时,一些关键参数(温度、湿度等)是时变的,更增加了精确建模的难度。文献[3]中提出了一种基于GMS摩擦模型的补偿方法,即建立速度观测器提供速度反馈信息。文献[4]提出了一种不基于模型的补偿方法,即采用扩展卡尔曼滤波方法对摩擦力进行估计。上述研究大部分都只针对摩擦力进行了补偿,而忽略了重力等因素,而这些因素也会对力反馈主手的反向驱动性能造成影响。
文献[5]采用扰动观测器对气动机械臂的外力进行估计,但是在测量状态量的过程中引入了大量的噪声。为了避免在求取加速度信息时引入噪声干扰,本文采用基于广义惯量的扰动观测器对外力进行估计。同时,为了得到较为准确的速度信息,提高系统的稳定性,采用速度观测器与扰动观测器结合的方式,通过扰动观测器估计的外力用于速度观测器以提高速度估计的准确性,同时由速度观测器得到的速度信息也被用于扰动观测器以提高外力估计的准确性。
1 单支链分析与建模
力反馈主手的单条支链结构如图1所示,由电机通过减速机和钢丝绳带动导轨做直线运动,电机的转动位置由编码器检测。电机的转矩平衡方程可以表示为
(1)
式中:J为折算到电机轴的总转动惯量;b为阻尼系数;fc为电机的实际输出转矩;fe为施加在电机上的总外力;fa为折合到电机上的总摩擦力。实验采用CAD(计算机辅助设计)方法[6]对导轨的质量与转动部分的转动惯量进行测量,并全部折算至电机的主轴,得到J=8.194kg·mm2。
当力反馈主手在自由运动阶段的时候,操作者施加在主手上的外力与摩擦力一起被视为扰动力。如果能够准确地估计出扰动力的大小,并将其作为补偿加入电机的控制量中,即可达到补偿的效果,从而减小操作者所需要的驱动力,提高主手的反向驱动性能。

图1 单支链实验装置
2 状态观测器设计
2.1 扰动观测器
扰动观测器的基本思想在于将电机上的扰动力矩看成是由摩擦力和外力产生的,因此可以根据电机状态量的变化来求出扰动力[7]。为了避免引入加速度,采用文献[8]中提出的基于广义惯量的扰动观测器来对扰动力进行估计。
运动部分的广义惯量定义如式(2)所示。

(2)
将广义惯量p对时间进行求导,得到
(3)
假设将施加在支链末端的外力与支链本身的摩擦力都看成是扰动力(fd),即令
fd=-fe-fa
(4)
由此可将式(3)改写为
(5)
(6)

对广义惯量p设定观测器:
(7)
式中:L为一个正的增益系数。将式(6)代入式(7)可得
(8)
(9)
可以看出式(9)的结构为一阶线性滤波器,带宽为L(rad/s)。从式(6)和式(7)中可以推导出:
(10)
(11)
写成状态空间方程的形式:
(12)


图2 基于扰动观测器外力估计
(13)
将式(13)代入式(1)中得
(14)
式中e为外部扰动力的估计误差,可以写为
(15)
可以看出,当系统到达稳态的时候误差值是趋于0的,同时误差收敛的速率取决于参数L的值。将式(2)和式(11)代入式(15)可得
(16)
由式(2)、式(10)和式(14)可得
(17)
因此可得系统的状态方程为
(18)
2.2 速度观测器
在主手系统中只能通过编码器获得位置信息,而不能直接获取速度信息。为了避免直接对位置进行差分而引入噪声,需要对速度建立全状态观测器。

(19)
由于不能直接对实际速度进行测量,将速度估计值代入式(17)与式(18)中可得:
(20)
(21)

(22)


(23)
其中:

V2=[0b]
式中:E为单位矩阵;M为质量矩阵。
3 仿真及实验研究
3.1 观测器仿真实验
在MATLAB/Simulink环境下搭建系统的仿真模型,假设系统的动力学方程由式(1)给出。为了在较为全面地反引出摩擦力与速度的关系的同时,能够尽量简化模型,仿真中选用Stribeck模型作为摩擦模型。仿真中所用实验参数为:等效转动惯量J=8.194kg·mm2,等效阻尼系数b=0.01N·m/s,仿真结果如图3所示。

图3 观测器仿真结果
从图中可以看出,观测器能够较为准确地估计外部扰动力,因此可以使用该方法对力反馈主手进行反向驱动补偿。
3.2 反向驱动补偿实验
3.2.1预备实验
由于选用电机的减速比较大,引入了较大的静摩擦力。导致在速度为0的时候,扰动观测器无法判断扰动力的方向,也就无法进行反向驱动补偿,因此,首先需要对静摩擦力进行补偿。为了研究在预滑动阶段的摩擦力特性,采用文献[10]中所描述的方法,使电机加载如式(24)所示的斜坡转矩信号。
(24)
式中:τ为加载转矩;r为转矩加载速度;t为转矩加载时间。文献[11]指出摩擦临界力与外力增加的速度有关,文献[12]也提出并证实了该观点,同时给出了具体的相关性描述,如图4所示。
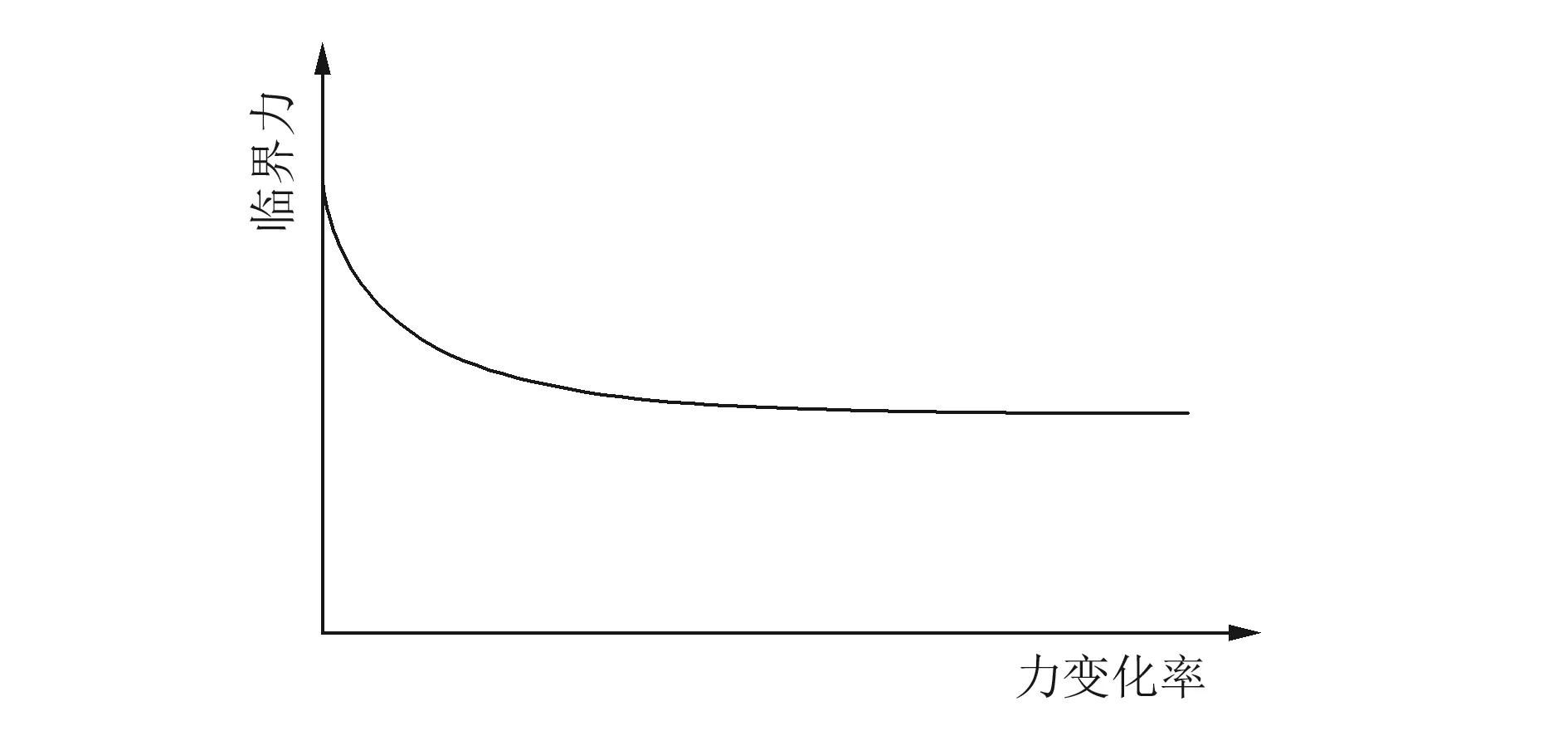
图4 临界力与外力变化率关系
为了得到较好的补偿效果,采用较小的力变化率来获得相对较大的临界力。选取电流的变化率为0.002A/s,电机的转矩系数为13.4mN·m/A,即r=0.026 8mN·m/s。在实验的过程中尝试了多组不同的τmax的值,实验结果如图5所示。

图5 加载斜坡力矩信号实验结果
从图中可以看出,随着电机电流转矩的增大,输出轴的角位移近似线性增大,说明在预滑移阶段力矩主要与电机转轴的位移有关。另外,从图5(a)中可以看出,当输出转矩被置为0时,输出轴会重新回到初始位置,此时可以认为电机输出轴仍处于弹性位移阶段,还没有突破静摩擦的临界值。从图5(b)与图5(c)中可以看出,在加载力矩峰值变大的情况下,当撤去加载力矩时电机会产生一定的永久性位移。从图5(d)则可以看出电机已经突破静摩擦的范围,进入滑动摩擦阶段,此时的临界力约为0.570 0mN·m。但是为了防止过补偿,选用相对较小的值进行补偿,因此设定电机的静摩擦力为0.564 0mN·m。为了判断静摩擦力的方向,利用行星轮减速电机具有回差这一特性,通过编码器检测减速机输出轴的微小位移即可判断出外力的方向,从而对静摩擦力进行补偿。
3.2.2单关节补偿实验
为了检测提出的反向驱动补偿控制方法的效果,在图1所示的单关节实验台上进行实验。在导轨的一端安装单维力传感器,通过检测力传感器信号可以得到反向驱动力的大小。由于安装条件限制,无法使用外部直线驱动器带动导轨运动,只能通过人手实现反向驱动,因此只能尽量保持导轨作匀速运动。分别测量在未补偿扰动力和补偿扰动力情况下的接触力,测量结果如图6、图7所示。
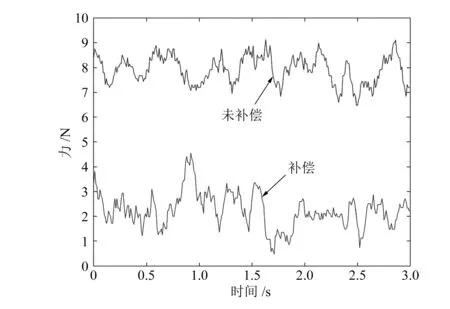
图6 正向补偿
从实验结果可以看出,在经过反向驱动补偿后,操作者所需要的驱动力大幅降低,正向驱动力的平均值降低了约70%,反向驱动力降低了约65%。
4 结束语

图7 反向补偿
针对采用大减速比减速机的力反馈主手存在反向驱动困难的问题,本文采用了扰动观测器与速度观测器相结合的方法,对摩擦力和外部扰动力进行补偿,从而避免了对摩擦力建模,提高了反向驱动效果。同时实验结果也表明本文所提出的补偿方法显著降低了反向驱动力。但是目前仅对单关节进行了实验研究,后续还需要对主手整体进行反向驱动补偿实验研究,以提升力反馈主手的操作性能。
[1] OLSSON H,ASTROM K J,WIT C C D,et al. Friction models and friction compensation[J]. European Journal of Control,1998,4(3):5517-5522.
[2] 刘丽兰,刘宏昭,吴子英,等. 机械系统中摩擦模型的研究进展[J]. 力学进展,2008,38(2):201-213.
[3] 倪风雷,刘宏,介党阳,等. 基于速度观测器的GMS摩擦模型辨识与补偿[J]. 电机与控制学报,2012,16(11):70-75.
[4] RAY L R,RAMASUBRAMANIAN A,TOWNSEND J. Adaptive friction compensation using extended Kalman-Bucy filter friction estimation[J]. Control Engineering Practice,2001,4(2):169-179.
[5] DAMME M V,BEYL P,VANDERBORGHT B,et al. Estimating robot end-effector force from noisy actuator torque measurements[J]. IEEE International Conference on Robotics and Automation,2011,47(10):1108-1113.
[6] 王树新,张海根,黄铁球,等. 机器人动力学参数辨识方法的研究[J].机械工程学报,1999,35(1):23-26.
[7] EOM K S,SUH I H,CHUNG W K,et al. Disturbance observer based force control of robot manipulator without force sensor[C]// IEEE International Conference on Robotics and Automation, 1998. Leuven:IEEE, 1998:3012-3017.
[8] OH Y,WAN K C,SUH I H. Disturbance observer based robust impedance control of redundant manipulators[C]// IEEE/RSJ International Conference on Intelligent Robots and Systems. Kyongju: IEEE,1999:647-652.
[9] WYMAN B F. Review of mathematical control theory:deterministic finite dimensional systems by Eduardo D. Sontag [J]. Linear Algebra and Its Applications,1992 (166):277-279.
[10] AUNG M T S,KIKUUWE R,YAMAMOTO M. Friction compensation of geared actuators with high presliding stiffness[J]. Journal of Dynamic Systems Measurement and Control,2015,137(1): 1-8.
[11] JOHANNES V I,GREEN M A,BROCKLEY C A. The role of the rate of application of the tangential force in determining the static friction coefficient[J]. Wear,1973,24(3):381-385.
[12] OLSSON H,ASTROM K J. Observer-based friction compensation[C]// IEEE Conference on Decision & Control.Kobe:IEEE,1997:4345-4350 .
