直升机相控阵毫米波防撞雷达信号处理技术研究
2018-01-30孙栋梁浩
孙栋+梁浩


摘要:在恶劣的气候条件下,直升机在搜救、低空作业的时候易受到低空飞行走廊上的山丘、树木、电力线、建筑物等影响,给飞行安全带来极大隐患,而国内对直升机防撞相关领域的研究相对较少。本文利用雷达实飞数据开展信号处理检测技术的研究,验证了数字阵毫米波雷达目标检测算法的可行性,既能准确检测目标,同时又控制了虚警率,取得很好的效果。
【关键词】防撞 数字阵 目标检测 虚警率
毫米波雷达具有频带宽、天线副瓣低、波束窄、抗干扰能力强、体积小、分辨力高等优点,可在恶劣的气候条件下全天候工作,因此,毫米波雷达在很多领域具有较大的发展潜力。目前,直升机在搜救、低空作业的时候,低空飞行走廊上的山丘、树木等自然物体及电力线、电线杆、建筑物等都会对直升机的安全飞行带来极大隐患,且故障率较高,典型场景见图1。据统计,各类事故中,碰撞引起的比例约占35%,因此加强雷达防撞技术研究具有很大的意义。漏检导致事故,虚警同样无法忍受,会给飞行员的判断产生极大干扰,如何安全可靠地回避障碍物是一个难点。本文通过实际试飞数据来验证数字阵毫米波雷达信号处理算法的可行性,处理流程主要包括目标检测、副瓣抗干扰、精确测高、测角等方而全而提高障碍物的检测能力。
1 目标检测技术
1.1 常规单元平均CFAR检测技术
本文研究的被测目标主要包括电力线、山体、高楼等静止目标,在多普勒域无法区分,因此整个检测区域都在杂波区。单元平均CFAR处理(快门限)主要作用于杂
波区,用于抑制剩余杂波的影响,即以检测点附近单元为参考单元,左右参考单元平均值选大为门限阈值,前后各一个保护单元,图2为单元平均CFAR选大处理框图。
然而,本文涉及到的一些障碍物回波信号宽于发射脉宽,目标能量会延伸到参考单元中,且跨越距离门的长度不固定,一些山体能跨十几个甚至更多距离门,常用的单元平均CFAR检测技术无法固定的选择合适的距离保护单元,会导致部分目标信息参与到参考单元中,降低信噪比,极大减弱系统检测能力,导致漏检,不适用于防撞检测。
针对障碍物存在跨多距离门特性,本文采用了一种自适应单元平均恒虚警检测技术,能动态剔除异常干扰大值,选择合适的参考单元值,在保证虚警率的同时可以提升系统的检测力。
1.2 自适应CFAR检测技术
自适应CFAR检测不设置固定的保护单元数,通过在被平均单元内自动筛选,获得参考单元值,并实现目标的CFAR检测。工作流程参考图3。
1.2.1 样本选择
首先,取被测信号的前后各N/2个样本点,当信号在左右两侧时,取N个样本做单边检测,对N个样本进行均值统计。
2 副瓣干扰抑制
尽管毫米波雷达具有高增益、低副瓣特点,但副瓣的影响依然存在,尤其在近地飞行过程中,副瓣干扰会严重影响目标检测及定位。为了剔除副瓣干扰,本文利用数字阵多子阵问的相位特性及相关性,采用了子阵问的相关法判干扰技术进行主副瓣判断,能够有效进行干扰抑制,剔除副瓣干扰信息。
相关原理:
2.1 干扰判断
以8通道数字阵为例,假设存在一个目标和一个干扰,则第p个子阵的接收信号可表示为
3 目标的测角和测高
防撞雷达不仅需要判断障碍物的有无,同时需要获取障碍物精确的位置和高度信息,飞行员可以提前预判,确保能安全避开障碍物。毫米波雷达本身具有波束窄、角分辨率高等优点,在测角方而具有天然的优势。通过对角误差的补偿来获得精确的方位角和俯仰角,从而计算目标的相对高度及方位。
根据子阵的之问的位置分布,需要对目标信号进行和通道、方位差和俯仰差的合成。
3.2 计算高度,精确测高
4 实测数据处理和分析
输入参数如表1。
图4为不同检测门限下两种不同的CFAR处理结果对比图。
从数据分析可知,图4中有两个目标,近距为目标1,跨13个距离门,远距为目标2,跨15个距离门,目标1峰值点信杂比约为15dB,谷值点信杂比约为9.5 dB,目标2峰值点信噪比约为16dB,谷值點信杂比约为lOdB。以上4幅图分别为门限系数3.0,3.5,4.0和4 5的检测结果,从不同门限的检测结果来分析,被测目标均在常规CFAR检测(曲线1)门限以下,常规单元平均CFAR无法检出目标;而自适应CFAR检测方式则不同,随着检测门限(曲线2)的变化,目标整体能被稳定检出,只是随着检测门限的降低,虚警逐渐增多。由此可见,一旦检测门限系数选择合理,在不确定目标跨多少距离门的情况下,采用自适应检测技术能较好的检测目标。
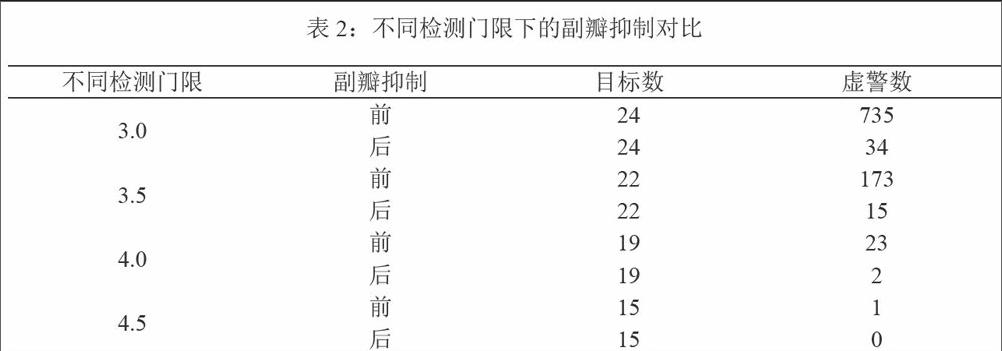
通过表2对比分析,不同的检测门限下,副瓣抑制对目标的没有影响,而对杂波有着明显的抑制。在检测门限为3.0时,由于门限偏低,虚警太多;而检测门限4 5时,目标个数偏少。因此选择3.5和4.0的检测门限较为合理,此时虚警个数降低到约10%,效果明显。目前该检测结果为单帧检测,经过后续帧问积累可进一步降低虚警率,在此不做详细介绍。
5 结论
本文通过对直升机数字阵毫米波防撞雷达的信号处理技术进行了研究,针对障碍物跨多个距离门的特性,开展了针对性的算法研究,包括优化的CFAR检测技术、副瓣抑制、目标测角测高技术等,采用了自适应单元平均CFAR检测,很好地解决了常规检测无法检测的问题,同时,利用数字阵多通道进行副瓣干扰抑制,能够较好的抑制杂波虚警,最后通过角误差计算获得目标的精确位置,能够辅助飞行员规避障碍物,取得了很好的效果。
参考文献
[1]余宏明,张志坚.毫米波雷达及对抗船舶电子工程[M].北京:国防工业出版社.2007(02):168-172
[2]向敬成,张明友.毫米波雷达及其应用[M].北京:国防工业出版社,2005(08).
[3]徐艳国,直升机防撞雷达关键技术及发展趋势[J].现代雷达,2011(02).
[4]杜鹏飞,张祥军.单元平均恒虚警率检测中的一个新结论[J].现代雷达,2007(02):60-62.
[5]都基炎,胡军,张百顺,七种恒虚警率处理方案及性能分析[J].现代雷达,2004,26(04).
[6]熊红林,等.毫米波有源相控阵技术在直升机火控雷达中的应用[J],现代雷达,2013(08).
[7]王永良,空时自适应信号处理[M].北京:清华大学出版社,2001(01).
[8]舒汀,陈新竹.子阵级数字波束形成抗多主副瓣干扰及测角技术[J].现代雷达,2016(12).endprint
