以CMOS图像传感器为主的视频监视实验系统设计分析
2018-01-25蔡燕平
蔡燕平
(湖南华南光电(集团)有限责任公司,湖南 常德 415007)
在传感器技术不断发展的今天,CMOS图像传感器的开发和应用可以对某一场景和目标进行监控,获取准确的图像。而将其应用于视频监视实验系统当中,可以有效提高信息收集的效率,其主要对多幅图像信息进行观察和分析,获得正确的监控信息,满足人们对目标进行跟踪和监督的要求。因此文章以此为基础进而探析系统设计的方法,使系统的作用得以充分发挥出来。
1 系统的主要构成部分及工作原理
(1)系统主要构成部分。以CMOS图像传感器为主的视频监视实验系统通常使用后端显示与控制系统、传输系统、前端探测系统等部分构成。其中前端探测系统在进行组装的时候,通过采用电控柜、摄像转台等构成。在摄像转台当中,其主要包含微光电视、可见光摄像机、嵌红外热像仪等,这些部件当中可见光摄像机和红外热像仪主要在明亮的白天进行工作,而微光电视和红外热像仪则可以在晚上进行工作。在系统当中电控柜,其由图像融合电路、图像预处理电路等部分组成。最后传输系统在进行设计的时候,包含光缆、光端机这两部分。而后端显示与控制系统则通过电视墙、操控台这两方面发挥作用。具体情况如图1所示。
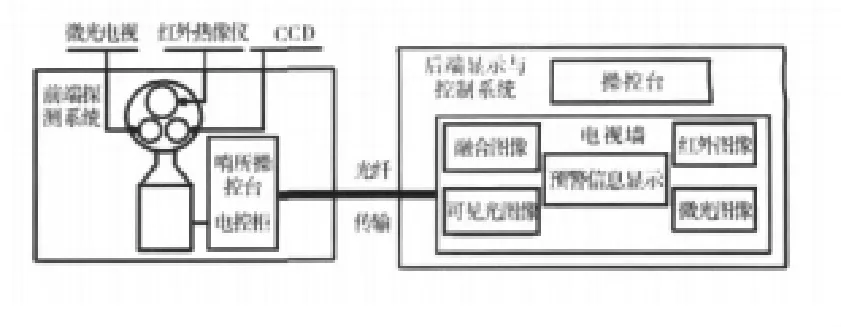
图1 以CMOS图像传感器为主的视频监视实验系统组成图
(2)系统的工作原理。在系统当中,其包含的前端探测系统由红外热像仪、微光电视主要通过图像预处理电路,完成视频收集和处理的要求,使其最终形成完整的数字视频。接着需要把经过初级处理的数字微光视频进行下一步的空滤波降噪处理,并且通过数字红外视频促进其图像质量的提高。然后对图像进行配准处理,在完成图像融合的步骤之后,数字视频可以到达视频压缩电路。另外经过处理的红外和微光视频也会到达视频压缩电路,接着进行压缩的3路数字视频,在完成压缩的操作之后使其可以到达传输系统。在传输系统当中有自动设置,可以及时把视频数据和相关的信息传送到后端显示与控制系统。另外显示与控制系统会显示出所传输的学习,并且往前端探测系统提出指令。在彩色摄像机进行对比,黑白摄像机在灵敏性方面要明显高于前者,可以在亮度较差的地方进行使用。

图2 系统的工作原理
2 前端探测系统设计
前端探测系统对监视系统设计有着重要的影响作用,其在设计的时候,需要合理应用摄像转台、电控柜和简易操控台这三个部分,完成设计的要求。
2.1 外形设计
转台的外框架属于进行支撑支承台体的结构,其材料和质量均会导致框架的使用寿命受到影响。在转台的外框架当中,其主要装有上方位自由度部分、俯仰自由度部分、球壳部分等。球壳当中包含装可见光摄像机、微光电视、红外热像仪这三个部件。俯仰自由度部分可以使球壳的可以上下进行移动+90°~-30°。而方位自由度部分则可以使摄像转台进行左右±175°方位的旋转。具体情况如图3所示。

图3 前端探测系统
2.2平行光轴设计与调校
(1)平行光轴设计。在目前的综合光电系统当中,多光轴的平行性会直接影响到摄像的效果。如果两个传感器之间可以实现光轴平行,则可以设视场为2θ,并且使用f进行代表光学物镜的焦距,d代表图像传感器的具体边长,u为传感器到目标之间的距离,b为两物镜之间的具体距离。镜头1的视场2θ可以采用公式tanθ=d/2f进行表述。如果物体之间的距离是无限的,θ无限接近于零的时候,则可以认为θ约等于d/2f。而两镜头的重合度ε可以采用公式ε=(2uθ-b)/2uθ=1-b/2uθ进行表示,并且设定Δ等于b/2uθ,则其重合度ε可以等于1-Δ。当Δ无限接近于零的时候,则重合度ε和1也就越接近。换句话说,如果两个传感器中心距无限接近于零,并且目标距离明显大于传感器中心距的时候,视场重合度将可以等同1,实现视场重合。在此系统当中,在实际接触的时候u的值均处于比较大的状态,20km左右,而b的值将低于或者等于0.5m,可以满足符合图像融合重合度需要超过90%的要求。另外需要意识到在现实生活中,两传感器光轴无法保持绝对平行的现象。在这种情况下可以假设2α为两光轴的夹角,在进行计算重合度的时候,可以采用ε=(2utanα-b)/4utanθ这个公式进行计算。因此可得出当图像传感器光轴夹角不大于0.5mrad时能满足图像融合视场重合度的要求。

图4 光轴平行性对图像融合的影响
(2)平行光轴调校。在调试平台当中需要合理安置探测器,在使其保持固定的同时,需要采用红外热像仪光轴作为衡定的标准。在操作的时候,首先需要进行调节红外热像仪视场十字分划线,其位置需要和靶标的十字线分划线保持一致,在使红外热像仪的位置得到确定之后,需要将靶标的位置当做衡定标准的位置完成记录。其次需要进行切换,使可见光摄像机1的视场可以清楚显示,在进行调整可见光摄像机1位置的时候,需要进行固定板上的4个过孔上下、左右位置,并且采用监视器进行检查可见光摄像机1的十字图像,最重要的就是要使中视场1的光轴对小视场光轴的平行度之间差距需要低于0.5mrad。最后使用以上的位置调整方法,运用让可见光摄像机2和微光电视光轴这两者均和红外热像仪光轴的平行性之间差距需要低于0.5mrad,然后给4个摄像单体固定板当中起到固定作用的螺钉涂上适量的胶水,并且使用工具将其拧紧。在完成这些操作步骤之后,多视场光轴的平行性位置的确定和功能应用均可以得到有效保障。
3 结语
充分利用可见光摄像机、微光电视、红外热像仪这三个部件的作用,可以构成以CMOS图像传感器为主的视频监视实验系统。在对其进行设计的时候,最重要的是要完善其前端探测系统。前端摄像转台需要达到俯仰+90°~-30°以及旋转±175°方位旋转的要求,并且在进行调整的时候,需要各探测器光轴平行性之间差距需要低于0.5mrad,才能使系统的设计实现图像融合的目标,最终使系统可以顺利进行准确目标监测。
[1]张兢.正交小波变换在图像融合中的应用[J].微计算机应用,2016,27(4):389-392.
[2]梅遂生,王戎瑞.光电子技术[M].北京:国防工业出版社,2015.
[3]张俊举,常本康,张宝辉,等.远距离红外与微光/可见光融合成像系统[J].红外与激光工程,2015,(1):20-24.
