基于Roberts算子的车道线图像的边缘检测研究
2018-01-25唐阳山徐忠帅黄贤丞朱停仃李栋梁
唐阳山,徐忠帅,黄贤丞,朱停仃,李栋梁
基于Roberts算子的车道线图像的边缘检测研究
唐阳山,徐忠帅,黄贤丞,朱停仃,李栋梁
(辽宁工业大学 汽车与交通工程学院,辽宁 锦州 121001)
图像预处理是车道线识别的前提,其中边缘检测的作用十分关键。本文以良好道路条件下采集的车道线图像为研究对象,进行了图像处理实验,在图像灰度化和二值化基础上,研究了不同的边缘检测算子的检测效果,通过比较发现在同等条件下,对于道路车道线图像的分割,Roberts算子边缘检测方法对车道线目标分割效果较优,最后通过优化边缘检测阈值参数进一步改进了Roberts算子的检测效果。
图像处理;边缘检测;Roberts算子;阈值
在图像处理中,首先是对图像进行平滑处理和二值化处理,然后对图像进行边缘检测,边缘检测算子种类多,有Roberts、sobel、prewitt、canny[1]等,这几种算子的检测效果都各有优劣。其中的Roberts算子采用对角线方向的相邻像素之差近似梯度幅值检测边缘[2],在水平和垂直方向的检测效果好于斜向边缘[3],理论上适合线性化的图像检测,但对于车道线检测还需进行大量实验验证,Roberts算子处理后的边缘也需进行细化处理[4]。
本文进行了不同车道线图像的边缘检测实验,以确定较优的检测算子,再通过图像平滑度的不同,选取最佳的阈值作为边缘检测的标准,用以提高车道线检测的精确性。
1 车道线图像的灰度化和二值化
1.1 车道线图像的灰度化和去噪处理
1.1.1 图像的灰度化
道路车道线图像需要经过灰度化转变成灰度图像,对灰度图像通过亮度区别出车道线和背景信息,使车道线容易识别出来。车道线灰度化时还要进行一定的增强,去除图像噪声。根据据灰度级确定黑白两种像素点,即车道线用白色表示,其他背景目标像素为黑色,图像灰度化、增强去噪和二值化是车道线图像边缘检测前的必要步骤。图1为图像预处理过程。
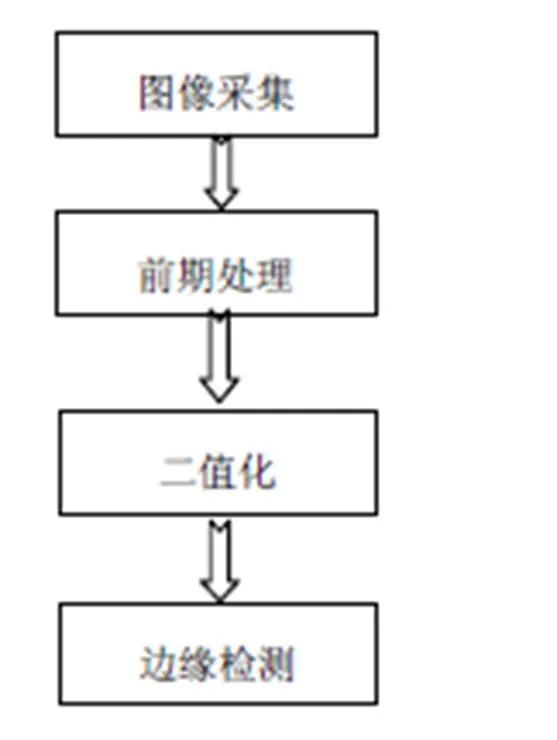
图1 图像预处理流程图
用CCD摄像机采集道路图像,采集的车道线为实线和虚线两种,然后对其进行灰度化处理,减少噪声的干扰,灰度化采用如下计算方法计算。

1.1.2 图像平滑处理
由于噪声的干扰,需要对采集的图像进行平滑处理,抑制噪声和保证鲁棒性,运用窗口大小为3*3的中值滤波的方法进行平滑处理。两幅不同道路图像的灰度化和平滑处理后的图像见图2所示。

图2平滑处理后的效果图
1.2 车道线图像的二值化
为了突出车道线、淡化背景,需要对图像进行二值化处理。图像的分割主要是选取一个理想的阈值,将图像分割成两部分,将大于该阈值的划分为一类,小于该阈值的划分为一类,选择一个阈值将图像划分为标线类和非标线类就是图像的二值化处理[5]。本文选择最常用、效果最佳的大津法进行二值化处理。
2 车道线图像的边缘检测
物体的边缘是以物体不连续性的局部特征的形式存在的,物体的边缘是区分各个物体的标准,物体边缘的亮暗程度、形状不同、平滑效果都是评判物体的标准。而边缘检测技术利用物体边缘亮暗程度的不同为前提,检测出物体边缘的不连续的点,然后将这些不连续的点连接起来,得到一个完整的边缘线,这样就可以取得分离图像的效果[6]。图像的边缘就是目标图像和背景图像的分割线,边缘检测可以很好的将二者分割开来。

图3 Roberts算子检测流程
2.1 边缘检测算子
在图像边缘检测时一般可以采用的算子较多,具体到某种图像信息识别,又有不同的适应性。在实验比较之前,首先从原理上来比较几种典型算子。
2.1.1 Roberts检测算子
该算子[6]首先计算像素点周围斜向偏差分的梯度,像素的强度用梯度大小来表示,与梯度的方向垂直的方向即为边缘,在像素坐标系下分别按照求取水平和垂直方向的梯度、,定义(,)表示经过计算的图像的灰度值见式(1),计算流程见图3。
经过简化以及推导,(,)可以用式(2)来表示。

2.1.2 Sobel检测算子
该检测算子从不同的方向对图像进行检测,是一组方向算子。Sobel边缘检测算子将中心像素上、下、左、右四个方向的权重增加,而不是简单的计算平均强度,这种检测方法有虽有利于边缘的寻找,但是不利于噪声抑制。
2.1.3 Prwitte算子
这种检测算子是利用像素点上下、左右邻点灰度差在边缘处达到极致的特性,比较有效地平滑处理图像的噪声,通常采用微分算子和模板匹配方法对图像进行边缘检测。
2.1.4 Canny算子
该边缘检测算子采用二维高斯函数的任一方向上的一阶方向倒数为噪声滤波器,经过图像强度卷积滤波后,找到图像梯度的局部极大值,从而确定图像边缘。
2.2 检测结果及改进
2.2.1 检测效果分析
分别采用不同的算法对两幅不同道路图像进行了边缘检测实验,检测的效果分别如图4、图5所示。选取的阈值分别如表1和表2所示。

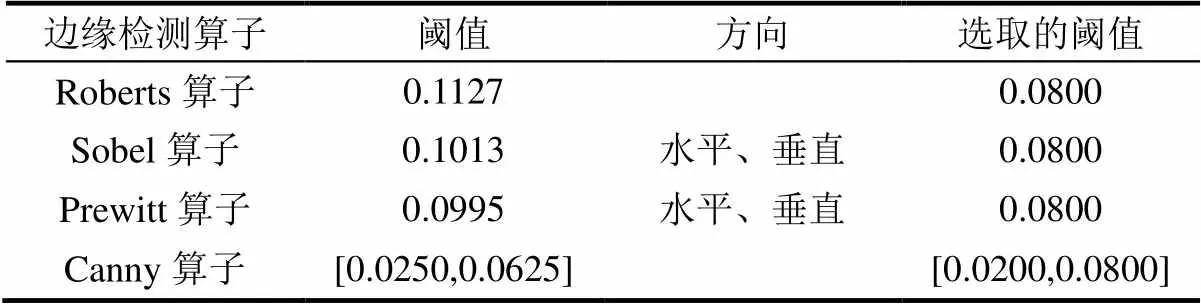
表1 边缘检测算子的阈值(图像1)

图5 道路图像2的边缘检测效果图
通过上述不同检测方法的实验效果比较发现,Roberts算子的边缘检测效果较好。因此,在车道线检测时优先采用Roberts算子的边缘检测方法。

表2 边缘检测算子的阈值(图像2)
2.2.2 检测方法改进
由于检测的车道线仍然不够平滑,在进行平滑度计算后通过调整阈值大小来进一步提高检测效果。图6为基于Roberts算子的改进的检测流程。

图6 改进的Roberts算子检测流程
2.3 阈值的选取
为了在上述改进的检测方法中合理变动阈值,减小计算量和不确定性,下面通过实验来确定较佳阈值参数,以提高边缘检测算法速度和检测质量。对两幅车道线图像分别进行Roberts算子检测,实验采用不同的阈值进行检测。图7是道路图像1的实验效果,图8为道路图像2的检测效果比较。

从实验的结果可以看出,选取的阈值小于自动阈值的图像不相干元素比较多,干扰大;选取的阈值大于自动阈值时,道路周围的不相干元素较少了,而阈值为0.20时的检测效果较好,小于0.20的不相干元素清除不彻底,大于该阈值会将车道线清除,使车道线不连续。

图8 道路图像2阈值的选取
3 总结
本文针对实线和虚线两种车道线的道路图像,实验结果表明Roberts算子对车道线的检测效果较优。然后采用Roberts边缘检测方法对车道线图像进行进一步的实验,改进了检测方法,通过图像的平滑度确定了相对较好的阈值,此时车道线检测比较清晰、完整,干扰因素较少,噪声低。这对于车道线的参数提取和识别具有关键的作用。
[1] 高勇钢. 一种改进Roberts算子边缘检测[J]. 巢湖学院学报, 2009, 11(6): 31-32. DOI:10.15916/j.issn1674-3261.2017.06.010
[2] 殷晓雪. 车道偏离预警系统的研究与实现[D]. 哈尔滨:哈尔滨工业大学, 2014.
[3] 肖刚. 车道偏离预警系统的设计与实现[D]. 广州: 广东工业大学, 2011.
[4] 毕雁冰. 一种车道偏离预警系统的图像处理方法[J]. 深圳信息职业技术学院学报, 2006, 4(3): 25-28.
[5] 圣华. 车道线检测在车道偏离预警中的应用研究[D]. 合肥: 合肥工业大学, 2010.
[6] 贺桂娇. 几种经典的图像边缘检测算子分析比较[J]. 计算机光盘软件与应用, 2014(9): 182-183.
责任编校:刘亚兵
Research on Edge Detection for the Lane Line Image Based on Roberts Operator
TANG Yang-shan, XU Zhong-shuai, HUANG Xian-cheng, ZHU Ting-ding, LI Dong-liang
(School of Automobile & Traffic Engineering, Liaoning University of Technology, Jinzhou 121001, China)
Image preprocessing is the precondition of lane line identification in which the edge detection is very important. In this article, image processing experiments are carried out with the lane line image collected in good road conditions taken as the research object. On the basis of certain image graying and binaryzation, the effects of different edge detection operators are studied by comparison. It is found that the Roberts operator edge detection method is more effective for the partition of lane line object. At last, it improves edge detection method of Roberts operator by optimizing the ideal threshold parameters.
image processing; edge detection; Roberts operator; threshold
10.15916/j.issn1674-3261.2017.06.009
U491.3
A
1674-3261(2017)06-0383-04
2017-09-05
辽宁省科技厅联合基金项目(201602375)
唐阳山(1972-),男,辽宁鞍山人,教授,博士。
