基于局部稀疏表示的模板匹配跟踪算法研究
2018-01-25,,,,
, ,,,
(浙江理工大学 信息学院,杭州 310018)
0 引 言
在计算机视觉领域中,目标跟踪是研究的重点之一,应用非常广泛,在智能视频监控、人机交互、计算机视觉导航、虚拟现实和医学诊断等领域中都有涉及。目标跟踪是对连续视频图像进行特征提取,分析获得目标的位置、大小、选择角度和速度等信息,并且持续地显示目标在每帧图像中的位置[1]。目前已有大量目标跟踪算法,这些算法可以分为以下5大类:a) 基于梯度场决策模型的跟踪算法,主流算法有基于Mean-shift跟踪算法[2]和基于均值漂移的目标跟踪算法[3]等;b) 基于概率决策的模型跟踪算法,主流算法有卡尔曼滤波跟踪算法[4]和基于粒子滤波的跟踪算法[5]等;c) 基于分类器决策模型的跟踪算法,主流算法有基于支持向量机跟踪算法[6]和TLD (Tracking learning detection)算法[7]等;d) 基于子空间表示模型跟踪算法,主流算法有增量视觉跟踪IVT(Incremental learning for robust visual tracking)算法[8]和基于增量PCA (Principal component analysis)跟踪算法[9]等;e) 基于稀疏表示模型的跟踪算法,主要算法有l1范数最小化视频跟踪算法[10]和局部稀疏表示跟踪算法(Local sparse representation tracking algorithm,LSRTA)[11]等。
基于稀疏表示模型的跟踪算法首先是由Mei等[10]提出的l1范数最小化的目标跟踪算法,该算法首次将稀疏表示的理论知识应用到目标跟踪领域,跟踪过程中需要人为设置初始模板以及正负最小模板,通过最小模板构造稀疏字典并进行粒子滤波产生粒子,最后用稀疏字典[12]对粒子进行l1范数最小化处理,选择构造误差最小的粒子得到目标的位置,该算法运行速度较快,能初步实现目标的跟踪。之后,许多学者开始加入到稀疏表示跟踪算法的研究中,提出了一系列算法,如:詹曙等[13]提出了Gabor特征稀疏表示目标跟踪算法,该算法在稀疏表示模板字典的更新过程中加入主元分析理论,在目标发生形变时,该算法有较好的跟踪效果。胡昭华等[14]提出了特征联合的稀疏表示跟踪算法,该算法用字典模板对候选粒子进行联合稀疏表示,改善了跟踪效果。Wang等[11]提出了LSRTA算法,将模板进行了分块并独立构造稀疏字典,再获得每个小块在帧图像中的投票图,最后合并为全局投票图,从而估计目标的位置。LSRTA算法能够在目标发生形变或者部分遮挡时具有较好的跟踪效果,但是当目标被遮挡面积过大、运动过快或形变量过大等情况存在时,跟踪过程中仍然会发生目标偏移现象。针对LSRTA算法的这个不足,本文提出了一种具有自动修正目标功能的稀疏表示跟踪算法。该算法在LSRTA算法的基础上,融入了模板匹配算法,通过不断计算新模板与当前模板的匹配值来判断跟踪是否发生偏移。当目标发生偏移时,通过模板与帧图像之间匹配来重新确定目标位置以修正偏移,改善跟踪效果。
1 模板匹配算法
本文中,模板匹配算法采用surf、flann和knn相结合的算法。surf算法找到两幅图像中感兴趣点的位置;flann算法对这些感兴趣点进行匹配,找出匹配成功的点对;knn算法对匹配成功的点进行筛选,去除零散的点对。该算法可以有效找出两幅图像之间相似点的集合。
surf算法通过计算一幅图像上所有像素点的Hessian矩阵的行列式与特征值,来判断整幅图像上哪些是感兴趣点[15]。Hessian矩阵可用式(1)表示为:
(1)

图1(a)是高斯滤波器滤波后的图像,其在x、y和xy方向上的离散二阶导数用Lxx、Lyy和Lxy表示。图1(b)是盒滤波器滤波后的图像,其在x、y和xy方向上的离散二阶导数用Dxx、Dyy和Dxy表示。图1中用简单权值表示黑色为1,白色为-1。在计算Hessian矩阵的过程中,可以使用盒滤波器近似计算,得出了Hessian矩阵行列式公式:
det(Happrox)=DxxDyy-(0.9Dxy)2
(2)
计算图像中所有点的行列式与特征值,如果行列式的值为负,并且特征值异号,则该点不是感兴趣点,如果行列式为正,并且特征值同号,则该点是感兴趣点。
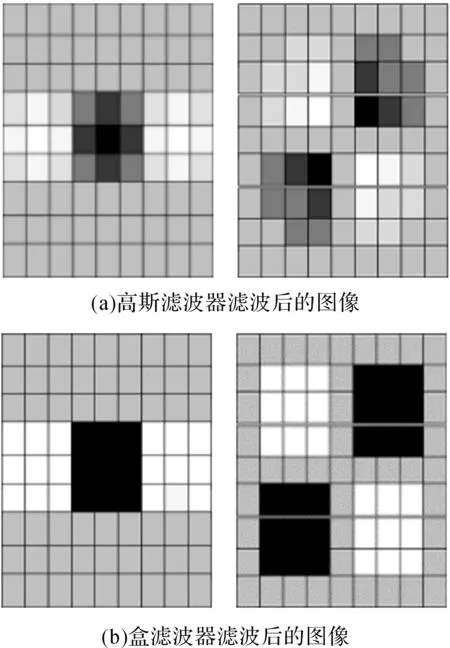
图1 高斯滤波器与盒滤波器滤波后的图像
flann算法[16]是对两幅图像中的感兴趣点进行匹配,找出匹配成功的点对。图2为flann算法示意图。图2左边是包含感兴趣点的图像,图像根据一定的分割规则分成多块,每一块包含一个感兴趣点。图2右边是将包含感兴趣点的图像以树型结构表示。先将两幅图像分别按以上方式分块树状结构表示,再从第一幅图像顶部根节点块开始,在第二副图像中搜索与第一幅图像顶部块最相似图像块,通过计算两幅图像块的欧氏距离来判断两个图像块是否相似,如果欧氏距离大于设定的阈值,则两幅图像块中感兴趣点匹配成功。否则进行下一个点的匹配,直至搜索到最底部;如果还没有找到匹配点,则第一幅图像中的感兴趣点没有匹配成功的点。再从第一幅图像中按自顶向下的原则寻找第二个块的匹配块,如此循环遍历第一幅图像中所有图像块,得到两幅图像中匹配的感兴趣点对集合。

图2 flann算法示意图
knn算法[17]对感兴趣点进行筛选,去除零散的感兴趣点对。先设定一个距离阈值,低于这个阈值的归为一类,否则归结到另一类;如此对图像中感兴趣点对进行分类;当某一类的数目小于数目阀值时,则该类可以被删除。图3(a)是经过surf和flann算法的匹配图,图3(b)是经过surf、flann和knn算法的匹配图。

图3 模板与帧图像匹配示例图像
2 LSRTMTA跟踪算法
本文在LSRTA算法的基础之上,融入模板匹配算法,提出了一种基于局部稀疏表示模板匹配跟踪算法(Local sparse representation template matching tracking algorithm,LSRTMTA),以实现在发生目标跟踪偏移时,自动修正重新定位功能。
图4为LSRTMTA跟踪算法整体流程图,先选定初始目标从而获得初始模板,再利用LSRTA跟踪算法对初始的目标进行跟踪。当得到新模板时,计算新模板与当前模板的匹配值。如果匹配值大于阈值,说明新模板没有发生太大变化,目标并没有发生偏移现象,则将新模板保存到模板集中。如果匹配值小于阈值,说明模板发生了大的变化,目标发生了偏移现象,则舍弃该模板,并且停止LSRTA算法,通过当前模板与帧图像进行模板匹配重新查找目标位置,如果目标在当前帧没有被找到时,该模板与下一帧图像匹配查找,直到找到目标;然后再次执行LSRTA算法,如此循环跟踪。
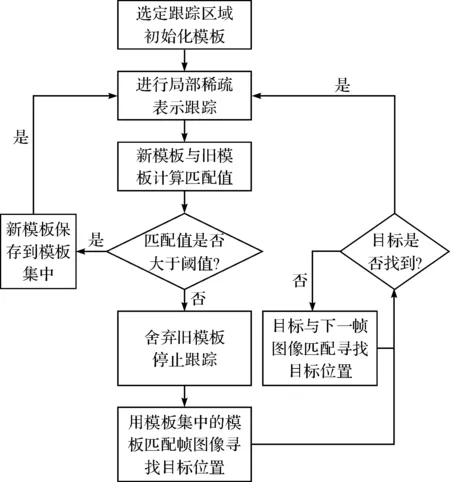
图4 LSRTMTA跟踪算法流程
图5为LSRTA算法跟踪示意图,先将模板进行均匀分块处理,左侧模板图像中PT=(dx,dy,h,ω)是模板分块后的一个矩形小块,模板中心滑动到该候选位置时,用PF:(x,y)表示帧图像F中对应模板PT的矩形块。

图5 LSRTA算法跟踪示意图
再通过计算帧图像中的矩形块PF:(x,y)与目标模板中的PT矩形块两幅图像的欧氏距离,来衡量它们之间的相似性,定义了投票函数VPT(x,y)来直观的反应他们之间的相似性,投票值越大,则相似程度越高。
VPT(x,y)=d(PF:(x,y),PT)
(3)
在式(3)的求解过程中,先对图像进行稀疏表示,其基本思想是用尽可能少的元素表示元素图像,用完备字典A={a1,a2,…,am}线性叠加表示图像y,图像y的表示模型为:
(4)
式(4)中:x为图像y在字典A上的稀疏表示,e为逼近精度。可以将上述l1范数最小化求解问题转化为l1正则最小均方问题:
(5)
对于式(5)的求解,选择基追踪(BP)算法[18]进行求解,得到稀疏值,再对稀疏值进行欧氏距离求解。为了能够求出每个小块PF:(x,y)的稀疏表示,需要对目标模板中所有的矩形小块PT构造各自独立的稀疏字典BF:(x,y),使模板在周围8个方向抖动来获得一个包含9个目标模板的稀疏字典,设PF:(x,y)在当前F中的观测值是yF:(x,y),则有:
(6)
在得到观测yF:(x,y)的系数向量c之后,计算得到其他与对应模板的似然:

(7)
通过相同的方法可以得到模板中其他矩形小块的投票图VPT(·,·)。最后需要将所有小块投票图合并成一个整体投票图。图6为投票图的合并流程图,在所有的矩形小块的投票图中选取投票值最大的作为该点最终得分,得分最大的点作为下一帧目标的位置。
C(x,y)=VPT(x,y)
(8)

图6 投票图的合并流程
图7为模板与模板匹配图,左边表示当前模板,右边表示新模板,通过模板匹配算法得到匹配图,计算匹配值,匹配值公式为:
(9)
式(9)中:m、n分别表示两幅模板图经过surf算法后得到的感兴趣点数量,k表示经过flann算法和knn滤波后感兴趣点数量。模板与模板匹配的示例见图7。图7中k=14,m=18,n=22,根据匹配值公式可以得到匹配值p=0.78,假设匹配阈值为0.62,由于匹配值p大于阈值,说明目标并没有发生偏移,新模板存入模板集中。

图7 模板与模板匹配图
图8为模板的存储过程,模板集中模板空间是固定的,新模板按照栈的形式依次保存在模板集中,在追踪过程中会产生大量模板,当模板存满时,最先存入的模板会被删除来保证不断的新模板被存入。

图8 模板存储过程
3 实验结果
为了验证本文的算法,在Matlab软件环境下编程实现LSRTMTA跟踪算法,采用tracker benchmark数据库进行实验对比。tracker benchmark数据库中有50组视频,其中:目标外观变形的有19组,目标遮挡的有29组,目标快速移动的有17组,这些视频已经基本考虑到实际运行过程中受到的各种干扰,在实际应用中有一定的代表性。选取ORIA算法[19](Online robust image alignment)、CT算法[20](Real-time compressive tracking)、IVT(Incremental learning for robust visual tracking)算法、CPF算法[21](Color-based probabilistic tracking)、LSRTA算法和本文提出的LSRTMTA算法进行对比。
在目标快速移动的视频中,其中boy视频6种算法实时跟踪结果如图9所示。在目标外观变形的视频中,其中mountainBike视频6种算法实时跟踪结果如图10所示。在目标遮挡的视频中,其中faceocc1视频6种算法实时跟踪结果如图11所示。

图9 boy视频运行效果

图10 mountainBike视频运行效果

图11 faceocc1视频运行效果
为了直观反映每一帧图像与实际跟踪目标的差距,本文定义了中心误差函数。中心误差值越小,代表目标跟踪越准确。某一帧图像中目标实际中心位置为M(x1,y1),跟踪标记的中心位置N(x2,y2),中心误差r(M,N)的计算公式为:
r(M,N)=[(x1-x2)2+(y1-y2)2]1/2
(10)
分别对每组测试视频绘制6种算法的中心误差图,计算每组视频中6种算法下的平均中心误差。x轴代表第几组测试视频,y轴代表每组视频中6种算法下的平均中心误差,得到平均中心误差,如图12所示。
计算50组视频中6种算法的总平均中心误差值,得到总平均中心误差、标准差与标准误见表1。
为了进一步反应算法跟踪效果与实际跟踪区域的覆盖程度,引用了覆盖率,表示实际目标区域与算法跟踪区域的交集部分占并集部分的比例。实际目标矩形区域A,算法跟踪矩形区域为B,s(C)表示C区域的面积,覆盖率c(A,B)计算公式为:
(11)

图12 6种算法下的平均中心误差

算法ORIACTIVTCPFLSRTALSRTMTA总平均中心误差1110.48.88.78.16.8标准差1.201.391.051.921.471.10标准误0.380.440.330.610.460.35
分别对每组测试视频绘制6种算法的覆盖率图,计算每组视频中6种算法下的平均覆盖率,x轴代表第几组测试视频,y轴代表每组视频中6种算法下的平均覆盖率,得到平均覆盖率,如图13所示。
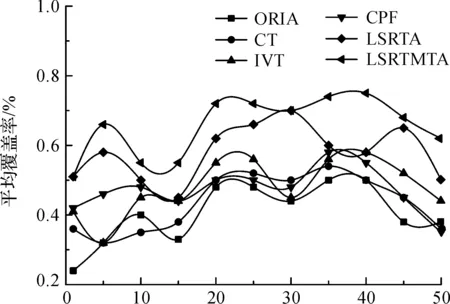
图13 6种算法下的平均覆盖率
计算50组视频中6种算法的总平均覆盖率值,得到总平均覆盖率、标准差与标准误见表2。

表2 6种算法的总平均覆盖率
为了整体评估算法的运行效果,引用了一次通过的评估(OPE)成功率图,x轴表示覆盖阈值,y轴表示成功率,首先对应一个给定的覆盖阈值x0,对于每一帧图片计算覆盖率,如果覆盖率大于覆盖阈值,则判断成功,l(n)=1,否则判断失败,l(n)=0,n表示所有测试视频中所有图片的总数,sum(l(n))表示n张图片中l(n)的和,成功率s(x,y)公式为:
(12)
其中:
在OPE成功率图中,函数曲线下的面积越大,代表目标跟踪的效果是越好。分别选取19组目标外观变形的视频、29组目标在遮挡情况下的视频、17组目标在快速移动的视频和整个50组视频,得到6种算法的OPE成功率,如图14所示。
选取整个50组视频,通过计算得到6种算法的OPE平均成功率,如表3所示。
最后为了说明文算法的实时性,选取了boy视频前200帧(从第二帧开始)的检测时间绘制算法处理时间图,如图15所示。
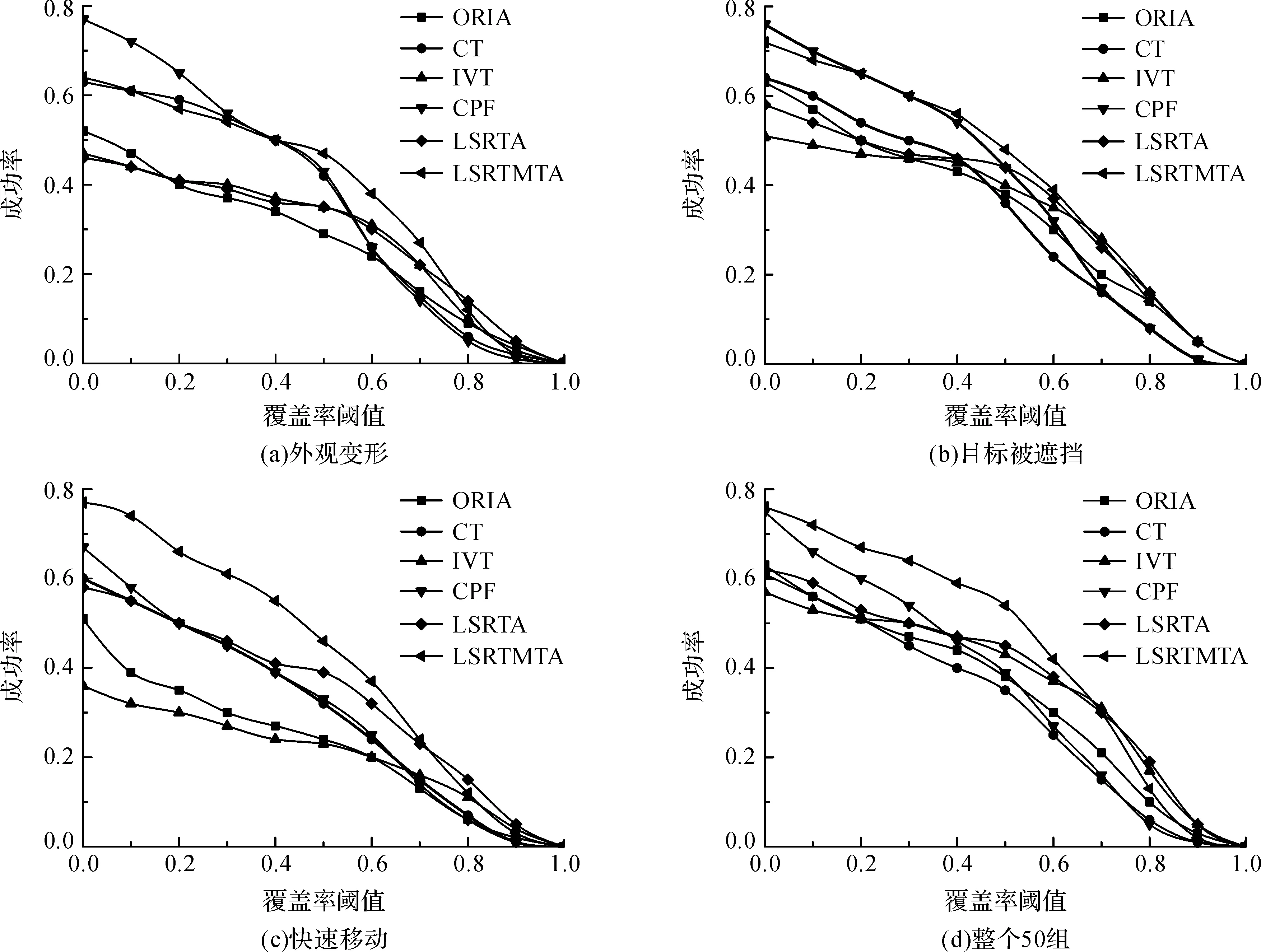
图14 6种算法下的OPE成功率

算法ORIACTIVTCPFLSRTALSRTMTA平均OPE成功率0.330.310.360.360.380.44
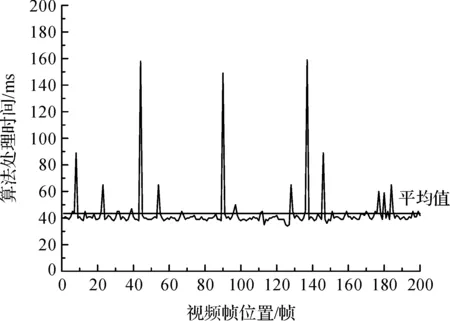
图15 采用本文算法对boy视频的跟踪处理时间
从图9—图11中可以明显地看出,在目标快速移动的boy视频、目标外观变形的mountainBike视频、目标遮挡的faceocc1视频中,本文提出的LSRTMTA跟踪算法在显示的那些图像中跟踪效果比较准确。
从图12中可以看出,对于50组测试数据,在6种算法中,LSRTMTA算法平均中心误差曲线下的面积最小;从表1中可以看出,50组总平均中心误差值也最小,说明LSRTMTA算法的中心位置与实际目标的中心位置最接近。
从图13中可以看出,对于50组测试数据,在6种算法中,LSRTMTA算法平均覆盖率曲线下的面积最大;从表2中可以看出,50组总平均覆盖率值也最大,说明LSRTMTA算法的矩形跟踪区域与实际目标矩形跟踪区域的覆盖程度最大。
从图14中可以看出,在19组目标外观变形的视频、29组目标在遮挡情况下的视频、17组目标在快速移动的视频和整个50组视频下,6种算法中LSRTMTA算法的OPE成功率曲线下的面积都最大;从表3中可以看出,在整个50组视频中,LSRTMTA算法的平均OPE成功率值最大。
从图15中可以看出,选取boy视频前200帧的处理时间计算出的平均处理时间为43.4 ms(Windows 7,4核),即每秒可处理约23帧图像,可以应用于实际场景实现实时目标跟踪。
综上所述,LSRTMTA跟踪算法在6种算法中跟踪效果最好,改善了LSRTA算法的跟踪效果。
4 结 语
本文针对目标偏移时跟踪无法修正的问题,在LSRTA算法的基础上,加入模板匹配算法,提出了LSRTMTA算法以解决目标跟踪偏移问题。该算法通过不断计算新模板与当前模板的匹配值来判断是否发生偏移,当目标发生偏移时,停止LSRTA算法的跟踪,通过模板与帧图像之间匹配来重新确定目标位置,当确定目标位置后,再次进行LSRTA算法的跟踪。实验结果表明,该算法不仅保留了LSRTA算法的优点,还具有自动修正偏移功能,改善了跟踪效果,增加了人物跟踪的容错性。
[1] 李博,张凌.基于视觉显著性的监控视频动态目标跟踪[J].信息技术,2014(4):60-65.
[2] 李霞.基于Mean-Shift算法的目标跟踪技术研究[J].自动化与仪器仪表,2016(4):20-22.
[3] 同鑫,熊红凯.基于均值漂移的视频目标跟踪改进算法[J].信息技术,2010(3):40-43.
[4] 李晶,范九伦.一种基于卡尔曼滤波的运动物体跟踪算法[J].计算机应用研究,2010,27(8):3162-3164.
[5] 张明杰,康宝生.一种基于图模型的粒子滤波跟踪方法[J].计算机应用研究,2016,33(2):590-593.
[6] 胡昭华,徐玉伟,赵孝磊,等.基于支持向量机的多特征选择目标跟踪[J].应用科学学报,2015,33(5):502-517.
[7] Kalal Z, Mikolajczyk K, Matas J. Tracking-learning-detection[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence,2012,34(7):1409-1422.
[8] Ross D A, Lim J, Lin R S, et al. Incremental learning for robust visual tracking[J]. International Journal of Computer Vision,2008,77(1):125-141.
[9] 孙涛,谷士文,费耀平.基于PCA算法的人脸识别方法研究比较[J].现代电子技术,2007,30(1):112-114.
[10] Mei X, Ling H. Robust visual tracking using l1 minimization[C]//Proceedings of the IEEE International Conference on Computer Vision (ICCV09),2009:1436-1443.
[11] Wang Q, Chen F, Xu W, et al. Online discriminative object tracking with local sparse representation[C]//Proceedings of the Workshop on the Applications of Computer (WACV12),2012:425-432.
[12] Fan J, Liang R Z. Stochastic learning of multi-instance dictionary for earth mover’s distance-based histogram comparison[J]. Neural Computing & Applications,2016:1-11.
[13] 詹曙,王俊,杨福猛,等.基于Gabor特征和字典学习的高斯混合稀疏表示图像识别[J].电子学报,2015,43(3):523-528.
[14] 胡昭华,徐玉伟,赵孝磊,等.多特征联合的稀疏跟踪方法[J].计算机应用,2014,34(8):2380-2384.
[15] 林晓帆,林立文,邓涛.基于SURF描述子的遥感影像配准[J].计算机工程,2010,36(12):216-218.
[16] 钟华,金国平,郑林华.基于扩展卡尔曼滤波的FLANN网络学习算法[J].信号处理,2009,25(10):1555-1559.
[17] 肖辉辉,段艳明.基于属性值相关距离的KNN算法的改进研究[J].计算机科学,2013,40(11):157-187.
[18] 张晓伟,李明,左磊,等.基于基追踪-Moore-Penrose逆矩阵算法的稀疏信号重构[J].电子与信息学报,2013,35(2):388-393.
[19] Wu Y, Shen B, Ling H. Online robust image alignment via iterative convex optimization[C]//Proceedings of the Conference on Computer Vision and Pattern Recognition (CVPR12),2012:1808-1814.
[20] Zhang K, Zhang L, Yang M H. Real-time compressive tracking[C]//Proceedings of the European Conference on Computer Vision(ECCV12),2012:864-877.
[21] Perez P, Hue C, Vermaak J, et al. Color-Based probabilistic tracking[C]//Proceedings of the European Conference on Computer Vision(ECCV02),2002:661-675.