基于图像识别的智能小车路径跟随系统设计
2018-01-24李前锟
李前锟
南京中设航空科技发展有限公司,江苏 南京 210000
1 剖析智能小车的系统结构
智能小车系统中包含路径跟随系统和环境感知系统。设计智能小车系统结构的核心是为了把通信模块、车载传感器以及跟随控制结构等功能有机结合在一起。一般来讲,智能小车系统的硬件结构在很大程度上决定了控制算法、小车路径识别与路径跟随等内容,而这些内容正好能够为智能小车结构设计和建立运动学模型提供理论参考依据。
需注意的是,研究智能小车路径的根本目的在于模仿人为驾驶小汽车的行驶过程,因而要求围绕人的驾驶行为构建小车平台。结合已有经验,人为驾驶行为可划分成操作、信息感知和轨迹决策等三部分内容,这便意味着构建智能小车平台也需从这三部分内容进行考虑。
文章将围绕智能小车路径跟随系统有关的闭环控制内容展开设计,路径识别和图像处理等工作均要求在上机位完成,路径跟随和车速控制则要求待下机位接收到命令后才正式在实验小车上施行(见图1)。
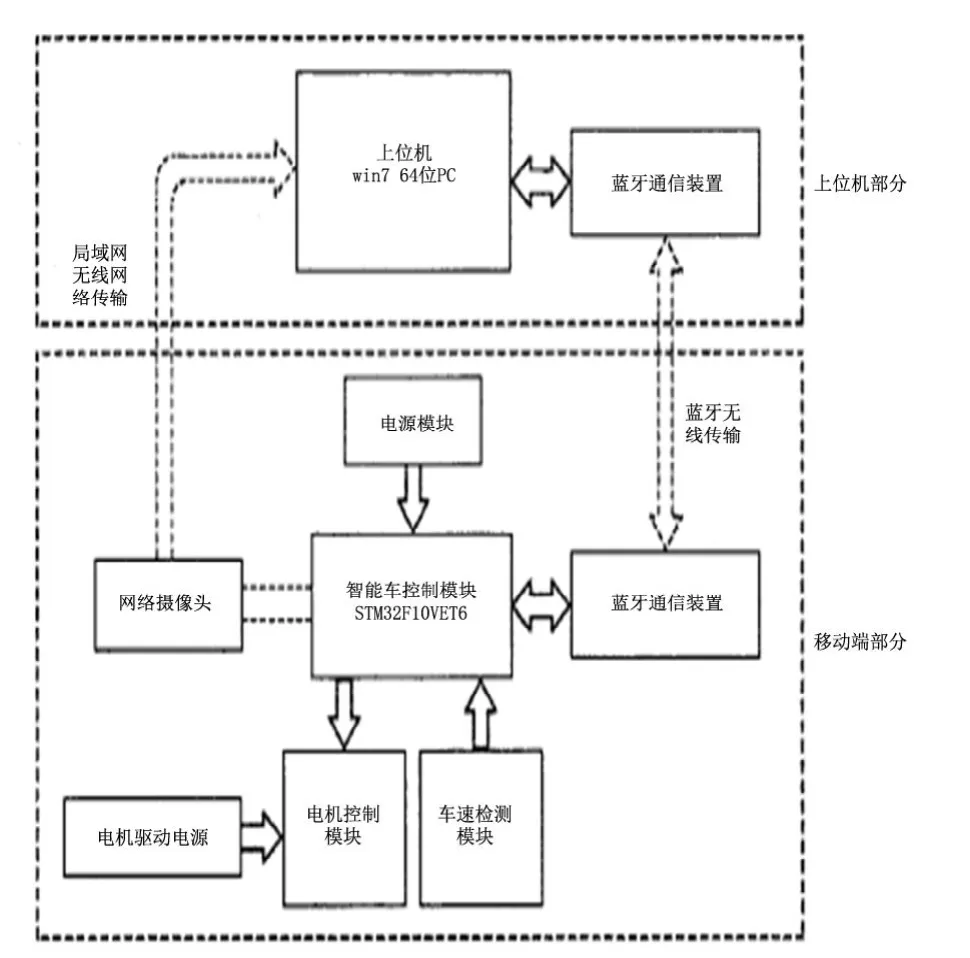
图1 智能小车系统结构图
2 解读图像处理和摄像机标定
2.1 了解图像处理原理
摄像机获取到的图像实际上是呈透视变形特征的RGB彩色图像。在对这一图像进行分析处理时,首先应消除噪声,其次才提取路径信息。
首先,图像灰度化。一般来讲,RGB彩色图像是一个三通道矩阵图,图像中包含的每一个像素均是由R、G和B等三分量所决定,且每一个分量中均包含了256个可选值。如果直接处理该图像,不仅耗时长,而且对整个系统造成的实时影响较大,且灰度图像中只涉及亮度信息,并没有囊括色彩信息。如果把 RGB彩色图像灰度化,就能够减少计算量,简化计算过程,进而提升运算效率。需注意的是,图像灰度值所代表的是图像颜色透明度,换言之便是亮度。
其次,最优阙值分割。所谓阙值分割实际上是根据一定阙值把目标从所选图像背景中分离出来,以此获得目标路径信息的过程。阙值分割可看成是对图像进行二值化处理的过程。分割环节应当把图像中涉及的所有像素点同设定阙值间进行对比,分开高于或低于像素的阙值,且将这些阙值分成前景与背景,随之便完成了该图像的二值化过程。需注意的是,阙值设定会直接影响图像信息提取准确率,这便意味着确定出最优阙值十分必要。
最后,数学形态学操作。所谓数学形态学,实际上是在一定形态结构元素的应用下度量并提取图像形状的过程,目的是为了有效分析与识别该图像。结合已有经验,数学形态学基本运算包含开启-闭合、膨胀-腐蚀等内容,且在灰度图像与二值图像对比中各自表现出的特征不同(见图2)。
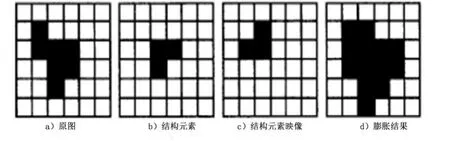
图2 膨胀运算示例图
2.2 投影变换与标定方法
对于智能小车而言,摄影机为其眼睛,是实现其从三维景象转换到二维平面图像的基础支撑[1]。在水平地面开展实验,摆放好移动智能小车后,需将网络摄像头固定其上,这样便实现了实验景象到图像的转变。需注意这一转换关系并未发生改变,依然为线性关系。由于是在水平地面上采集影像,因此要求利用二维坐标进行描述即可(见图3)。

图3 摄像机同像平面三维空间中存在的二维平面坐标关系图
3 基于图像识别的智能小车路径跟随系统设计
系统设计主要围绕实验操作流程展开,文章自主搭建了一个20∶1双轮驱动式智能小车模型,不仅独立完成了嵌入式的程序开发设计,并且进一步验证了智能小车算法的可行性。结合已有经验,基于图像识别的智能小车路径跟随系统设计,需从智能小车硬件平台搭建出发,就嵌入式程序开发和硬件调试等内容展开设计。
3.1 布置硬件系统
准备好硬件后,便需要按照小车结构参数(见表1)和相关流程将元件安装到小车对应位置上。
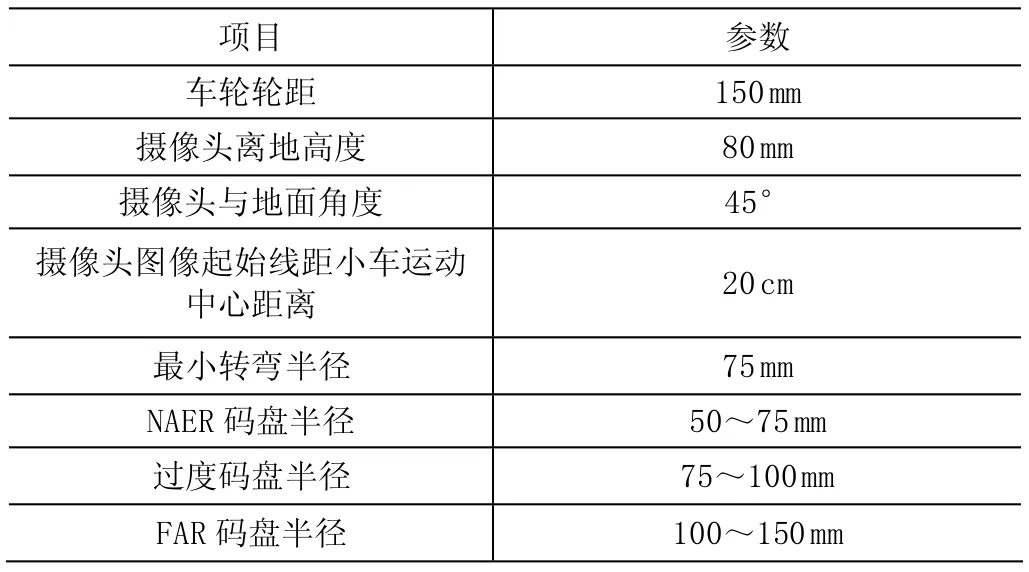
表1 小车各结构参数表
3.2 搭建智能小车平台
首先,配置上位机。存在于系统中的上位机,主要作用在于开发出控制台的窗口程序,随后对各个图像信息进行分析处理,并实现数据包的发送和接受功能。正因为算法中包含了多线程设计时与延时串口数据的发送功能,因此应当结合CPU展开四线程运算,而此次实验主要使用的是PC机,其核心配置为:网卡:Realtek PCIe GBE Family Controller;CPU:ntel(R)Core(TM)i5.2300CPU四核处理器;主频:2.80 GHz;操作系统:Windows7 64位;内存:4 GB。
其次,设计移动端。结合已有经验,移动端硬件系统多是由串口通信模块、智能小车底盘、车速检测模块、电源模块、电机控制模块、ARM开发板和网络摄像头等内容构成。
其中,作为整个智能车核心控制平台的是 ARM开发板,其除了能对车速检测模块与电机控制模块进行控制外,还能够及时将各类检测信息传送给上位机。此外,串口通信模块同智能小车建立通信桥梁,以此向上位机传递数据并实现蓝牙通信[2]。
3.3 调节智能小车轮速
设计最后一部分为调节智能小车轮速,因实验中采用的是直流电流,因而首先要做的是调试驱动电机,最后是调节轮速PID(见图4)。

图4 PID调节流程
此外,还应完成指令延时与方向修正设计,待图像分析计算操作完成后,便可根据实际情况展开指令延时和方向修正操作,确保实验结果精准。
4 总结
综上所述,文章基于图像识别视角,对智能小车路径跟随系统展开实验设计,目的在于解决智能小车当前存在的路径跟随和环境感知问题。在本次设计的实验路径中应用到了模糊控制法,其能有效控制实验过程和结果。
[1]周南.基于图像识别的智能小车路径跟随系统设计[D].长沙:湖南大学,2016.
[2]李康顺,王福滨,张丽霞,等.基于改进 BOF算法的图像识别和分类[J].中南大学学报(自然科学版),2016,47(5):1599-1605.
