分割尺度对面向对象树种分类的影响及评价*
2018-01-16毛学刚陈文曲魏晶昱范文义
毛学刚 陈文曲 魏晶昱 范文义
(东北林业大学林学院 哈尔滨 150040)
森林类型信息可为森林资源调查、造林、经营管理以及规划设计提供重要依据。在过去几十年里,遥感一直是森林资源信息管理与监测的重要信息源,同时也是一种有效的低成本地获取森林资源数据(地理位置、空间范围、森林类型和森林结构)的技术手段。目前,基于遥感技术的森林类型识别已经进行了广泛深入的研究,主要包括多光谱遥感影像分类(Vieiraetal., 2003)、多时相遥感分类(Colstounetal., 2003; Wolteretal., 1995)、高光谱遥感分类(Clarketal., 2005; Goodenoughetal., 2003; Lawrenceetal., 2006)、高空间分辨遥感分类(Immitzeretal., 2012)和多传感器遥感数据协同分类(Sunetal., 2014)等。
高空间分辨率遥感影像地面分辨率通常在4 m以上,影像细节更加清晰,提供了能够区分林分尺度树种的可能,已越来越多地被应用到林分尺度森林类型信息的提取中。但高空间分辨率遥感影像像元反射率的变化受冠层结构、地形和阴影等因素影响,其像元光谱响应曲线并不能完整地表达林分尺度树种的光谱特征,因此,基于像元光谱数据对高空间分辨率遥感影像树种进行分类并不合适,而且会产生“胡椒盐”现象(Johansenetal., 2010)。为了更好地利用高空间分辨率遥感影像,面向对象分类方法随之产生,该方法能充分利用高空间分辨率遥感影像更为丰富的形状与纹理信息等特征提取林分尺度的树种类型信息(Hossainetal., 2012; Mutangaetal., 2012; Malthus, 2008; Vepakommaetal., 2008),因而受到广泛关注。
合成孔径雷达(synthetic aperture radar,SAR)以其全天时、全天候的强穿透成像能力,成为了光学遥感的有益补充(王馨爽等, 2014),有时甚至是数据获取的唯一手段。目前,SAR数据获取逐渐变得容易,这为树种分类提供了新的数据源,已有研究使用SAR数据进行了森林类型信息的提取(白黎娜等, 2003; 王馨爽等, 2014; Liesenbergetal., 2013)。SAR数据提供的树种特有的树冠垂直结构信息能够补充高空间分辨率遥感影像的光谱信息,因此高空间分辨率遥感影像与SAR数据结合能获得更好的森林分类结果(Banetal., 2010)。
在面向对象分类方法中,影像分割被认为是面向对象分类的关键步骤,直接影响分类精度(Kimetal., 2008; Sousa, 2004)。目前已提出了很多分割算法,如均值漂移分割(Comaniciuetal., 2002; Micheletal., 2015)、分形网络演化算法(Baatzetal., 2004)和分水岭分割算法(Lietal., 2011; Lietal., 2010; Vincentetal., 1991)等,且大多数分割算法都需要一个用户自定义参数(尺度参数),该参数控制分割内的同质性、分割间的异质性以及分割大小。由于地理对象的复杂性,自动获得最优尺度参数仍然具有挑战性和不确定性,因此许多研究采用反复试验、目视解译的方法来确定最优尺度参数(Choetal., 2012; Malahlelaetal., 2014)。
目前,遥感影像分割依然是面向对象分类技术的难点。为了提高遥感影像分割质量,最有效的方法就是依据不同的分割影像在不同应用中的具体特点,同时结合有效的分割质量评价方法确定最优分割尺度,因此有必要研究不同分割尺度参数分割不同遥感影像的效果,定量评价尺度参数对面向对象分割和分类的影响。本研究协同使用高空间分辨率遥感影像(QuickBird)与星载全极化SAR数据(Radarsat-2)进行面向对象树种分割与分类,定量评价分割尺度对不同遥感数据(QuickBird遥感影像、Radarsat-2数据和QuickBird & Radarsat-2协同)的面向对象方法树种分割与分类的影响,进而评价高空间分辨率遥感影像与星载全极化SAR数据协同树种识别的适宜性。
1 研究区概况及数据
1.1 研究区概况
研究区为SAR(Radarsat-2)数据和QuickBird遥感影像的相交区域(图1),面积约为9 927 hm2,位于福建省三明市将乐县将乐国有林场,地理坐标为26°40′—26°50′N,117°25′—117°35′E。最高海拔1 203 m,最低海拔140 m,平均海拔400~800 m。针叶树种主要有杉木(Cunninghamialanceolata)、马尾松(Pinusmassoniana),阔叶树种主要有枫香(Liquidambarformosana)、福建柏(Fokieniahodginsii)、巨尾桉(Eucalyptusgrandis×E.urophylla)、木荷 (Schimasuperba) 等。杉木树高集中在13~18 m,平均高12 m; 马尾松树高集中在12~15 m,平均高13 m; 阔叶林树高主要集中在10~15 m,平均高13 m。由于研究区绝大部分为杉木和马尾松,阔叶林较少,因此将阔叶林整体作为一种类型。本研究主要研究杉木林、马尾松林和阔叶林3种类型。

图1 研究区及遥感影像图(SAR数据及QuickBird影像)Fig.1 Study area and remote image(SAR data and QuickBird image)
1.2 数据收集与处理
1.2.1 高空间分辨率遥感影像 高空间分辨率遥感影像采用QuickBird遥感影像(图1)。QuickBird遥感影像获取时间为2013年7月12日,包括1个空间分辨率为0.61 m的全色波段(450~900 nm)和4个空间分辨率为2.44 m的多光谱波段[蓝色波段(Blue): 450~520 nm; 绿色波段(Green): 520~600 nm; 红色波段(Red): 630~690 nm; 近红外波段(NIR): 760~900 nm]。在面向对象分类过程中只使用4个多光谱波段,原因为: 1) 对于林分尺度的树种分类,QuickBird遥感影像多光谱波段的空间分辨率已足够; 2) QuickBird遥感影像空间分辨率较高,与Radarsat-2数据的空间分辨率相匹配。QuickBird遥感影像云量所占比例为0.5%,大气环境比较清晰,倾斜视角为11°。QuickBird遥感影像正射校正后的误差均小于1个像元,采用WGS84(world geodetic system-1984)地理坐标系和UTM(universal transverse mercator projection)的50 N带投影坐标系。
1.2.2 SAR数据 SAR数据采用2013年10月30日和11月23日的1对Radarsat-2 C波段精细全极化(HH&VV&HV&VH)SLC(single look complex)单视复数图像(图1),轨道号分别为88-262A和89-262A。SAR数据记录方式为32 bit复数形式,分辨率(距离×方位)为5.2 m×7.6 m,幅宽为25 km×25 km,入射角为34.620°,中心点坐标为26°45′N,117°13′E。对SAR数据进行地理编码之后,使用与QuickBird遥感影像相同的地理和投影坐标系。数字表面模型(digital surface model,DSM)基于两景SAR数据,采用干涉测量技术(synthetic aperture radar interferometry,InSAR)获得。由于Radarsat-2 C波段不能穿透树冠,采用InSAR获得的数字高程模型(digital elevation model,DEM)精度非常低,所以DEM由研究区的1∶10 000地形图矢量化等高线生成不规则三角网(triangulated irregular network,TIN)进行线性内插创建,删格大小与DSM相同。坡度(Slope)和坡向(Aspect)数据来源于DEM,高度(Height)数据由DSM和DEM数据相减获得。SAR散射数据(Pauli-RGB)采用PolSARpro(polarimetric SAR data processing and educational tool)软件对Radarsat-2数据进行Pauli分解获得,其中红色分量(Pauli-R)为偶次散射,绿色分量(Pauli-G)为π/4偶极子散射,蓝色分量(Pauli-B)为奇次散射。
1.2.3 地面参考数据 地面参考数据包括2012年森林资源二类调查小班资料(图1)及2013年7月研究区森林类型野外调查数据。2012年森林资源二类调查小班资料来源于福建省将乐林场,2013年森林类型野外调查数据由北京林业大学和东北林业大学共同完成。选取森林资源二类调查小班资料中单一树种的小班,以经过融合的QuickBird(0.6 m)假彩色图像为底图(图1),对小班进行重新划分并去除非森林区域,获得包括研究区主要树种的100个单一树种同质多边形,结合野外调查数据的80个多边形,共获得180个参考多边形。为保证不同的分割尺度和不同的数据源采用同一套验证训练样本和检验样本,将参考多边形转化为参考点(Imetal., 2007; 2008)。随机选取90个多边形参考点作为训练样本进行分类,余下的一半参考点用于验证分类结果。
2 研究方法
面向对象分类包括3个过程: 1) 影像分割即创建对象; 2) 对象特征提取; 3) 面向对象分类。影像分割采用3种分割方案: 1) 单独使用QuickBird遥感影像分割; 2) 单独使用Radarsat-2数据分割; 3) QuickBird & Radarsat-2协同分割。每种分割方案都试验10种分割尺度(25~250,步长为25),采用修正的欧式距离3(ED3modified)评价分割质量(Yangetal., 2015)。单独使用QuickBird遥感影像分割-分类和Radarsat-2数据分割-分类分别采用光谱特征和地形+高度+散射特征,QuickBird & Radarsat-2协同分割-分类采用二者共同特征,均采用支持向量机(support vector machine, SVM)分类器进行树种分类。对不同尺度的3种分割-分类方案采用同一套验证样本进行精度检验,定量评价分割尺度对面向对象分割与分类结果的影响,技术路线如图2所示。

图2 技术路线Fig.2 Technology roadmap
2.1 影像分割
影像分割采用eCognition Developer 8.7(易康)软件的分割算法[多尺度分割(multiresolution segmentation, MRS)]。MRS由4个参数控制——尺度、形状、紧密度和输入图层所占权重(Benzetal., 2004)。分割的大小主要由尺度参数决定,一般情况下大的尺度参数产生大斑块,小的尺度参数产生小斑块。本研究主要探讨分割尺度对面向对象分割及分类结果的影响,因此其余3个参数(输入图层所占权重、形状和紧密度)采用默认值(1、0.1和0.5)。在相同分割尺度上,采用3种分割方案(单独使用QuickBird遥感影像、单独使用Radarsat-2数据和QuickBird & Radarsat-2协同)。单独使用QuickBird遥感影像分割采用4个多光谱波段(Blue、Green、Red和NIR),单独Radarsat-2数据分割使用DEM、DSM、Height和Pauli-RGB数据。Height数据用来区分不同高度林分,DEM用来获得林分内的同质性,另外,DEM有助于区分海拔不同的林分。QuickBird & Radarsat-2协同分割采用QuickBird的4个多光谱波段、DEM、DSM、Height和Pauli-RGB数据。3种分割方案均设置10种分割尺度(25~250,步长为25)。
2.2 对象特征提取
分类过程中采用的对象特征是根据光谱、地形、高度和散射信息计算得到的。除了计算每个数据层的平均值和标准差外,还计算了绿色和近红外2个波段的灰度共生矩阵(GLCM)及灰度级差矢量对比度(GLDV)(Youngetal., 1986; Ecognition, 2010),因为这2个波段已被证明能够用于树种识别(Gitelsonetal., 1996)。对象的几何特征(形状、紧密度)并没有采用,主要是因为这些特征在植被分类中几乎没有作用(Yuetal., 2006)。本研究共选取34个特征,其中16个特征来自QuickBird多光谱影像,6个特征来自地形数据,6个特征来自Radarsat-2提取的高度数据,6个特征来自Radarsat-2进行Pauli分解的Pauli-RGB数据(表1)。

表1 面向对象分类的对象特征Tab.1 Image object metrics used in the classifications
2.3 面向对象分类
面向对象分类采用eCognition Developer 8.7软件的支持向量机(SVM)分类器。SVM分类器通过非线性变换将输入空间变换到一个高维的特征空间,然后在这个新的高维特征空间中求取最优分类超平面(Vapnik, 2000)。对输入数据的这种变换是通过核函数进行的[线性、多项式、径向基(radial basis function, RBF)、S形]。单独使用QuickBird遥感影像分割-分类采用16个光谱特征作为输入数据; 单独使用Radarsat-2数据分割-分类采用地形、高度和散射特征共18个特征作为输入数据; QuickBird & Radarsat-2协同分割-分类采用光谱、地形、高度和散射特征共34个特征作为输入数据。3种分割-分类方案均采用带有RBF核函数的SVM分类器进行分类,共获得30种分类结果。
2.4 分割质量及分类精度评价
分割质量评价已有一些指标(Clintonetal., 2010; Liuetal., 2012; Mölleretal., 2007; Zhanetal., 2007)。本研究采用修正的欧式距离3(ED3modified)进行分割质量评价(Yangetal., 2015),该指标的优点是当与一个参考多边形的重叠区域超过参考多边形或被分割对象的50%时,被分割对象才被标记为相应参考多边形的分割。ED3modified是介于0~1之间的归一化指数,计算方法如下:
(1)
式中:ri为参考多边形;I为参考多边形的数量;sj为对应参考多边形ri的分割多边形;ji为相对应的分割数。
ED3modified越低,表示分割质量越高。在90个检验样本中,抽取杉木、马尾松和阔叶林各10个参考多边形采用ArcGIS 10.0软件计算ED3modified,最佳分割结果由ED3modified最低值确定。
采用混淆矩阵计算的总精度(OA)和Kappa系数2个评价指标(Janssenetal., 1994)对3种分割-分类方案的30种分类结果进行精度评价。对OA的比较可以获得以下3种结果: 1) 分割尺度对树种分类精度的影响; 2) QuickBird & Radarsat-2协同使用对影像分割的作用; 3) QuickBird & Radarsat-2协同对分类结果的作用。
3 结果与分析
3.1 影像分割与评价
在尺度参数25~250尺度上,QuickBird & Radarsat-2协同分割(ED3modified平均值=0.44)与单独使用QuickBird遥感影像分割的ED3modified(ED3modified平均值=0.45)并无明显差异,但均明显高于单独使用Radarsat-2数据分割的ED3modified(ED3modified平均值=0.66)(图3),这说明QuickBird & Radarsat-2协同分割的质量略高于单独使用QuickBird遥感影像,明显高于单独使用Radarsat-2数据分割。采用相同的分割尺度,3种分割方案具有不同的ED3modified,这说明影像分割质量除了受尺度参数影响外,分割过程中所使用的数据也会影响分割质量。QuickBird遥感影像分割在尺度参数150上ED3modified最低(ED3modified=0.37); Radarsat-2数据分割在尺度参数125上ED3modified最低(ED3modified=0.54); QuickBird & Radarsat-2协同分割尺度参数100为最优分割结果,这也是3种分割方案中ED3modified的最低值(ED3modified=0.34)(图3)。
QuickBird & Radarsat-2协同分割尺度参数在25~250上马尾松林、杉木林和阔叶林分割结果的ED3modified如图4所示。杉木林的分割质量(ED3modified平均值=0.35)优于马尾松林(ED3modified平均值=0.45)和阔叶林(ED3modified平均值=0.49),在150~250尺度效果明显。马尾松林和阔叶林分割质量差距不大,尤其在25~125尺度。
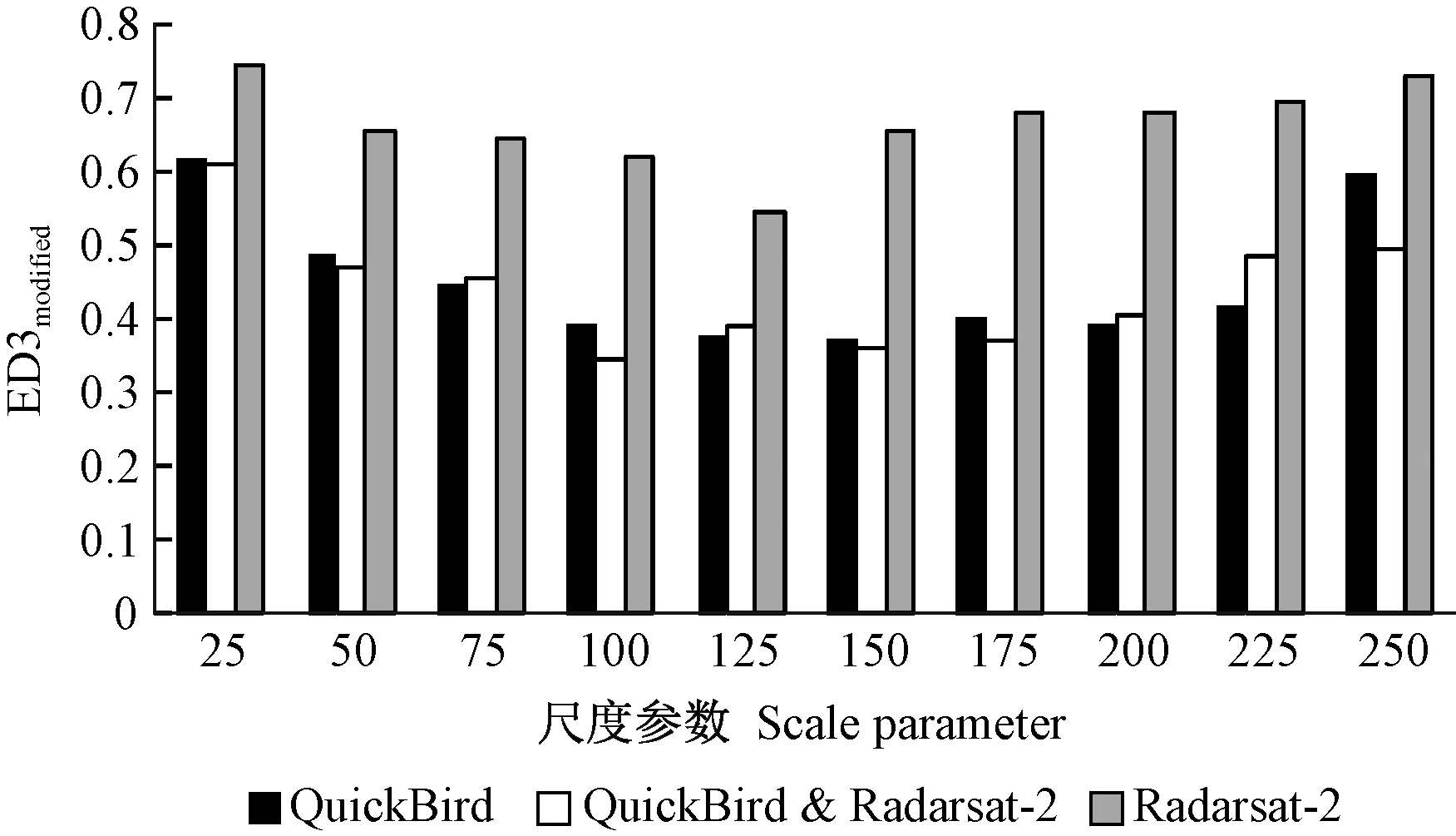
图3 3种分割方案尺度参数在25~250上分割结果的ED3modifiedFig.3 ED3modified values for three segmentation schemes as a function of the scale parameter ranging between 25-250
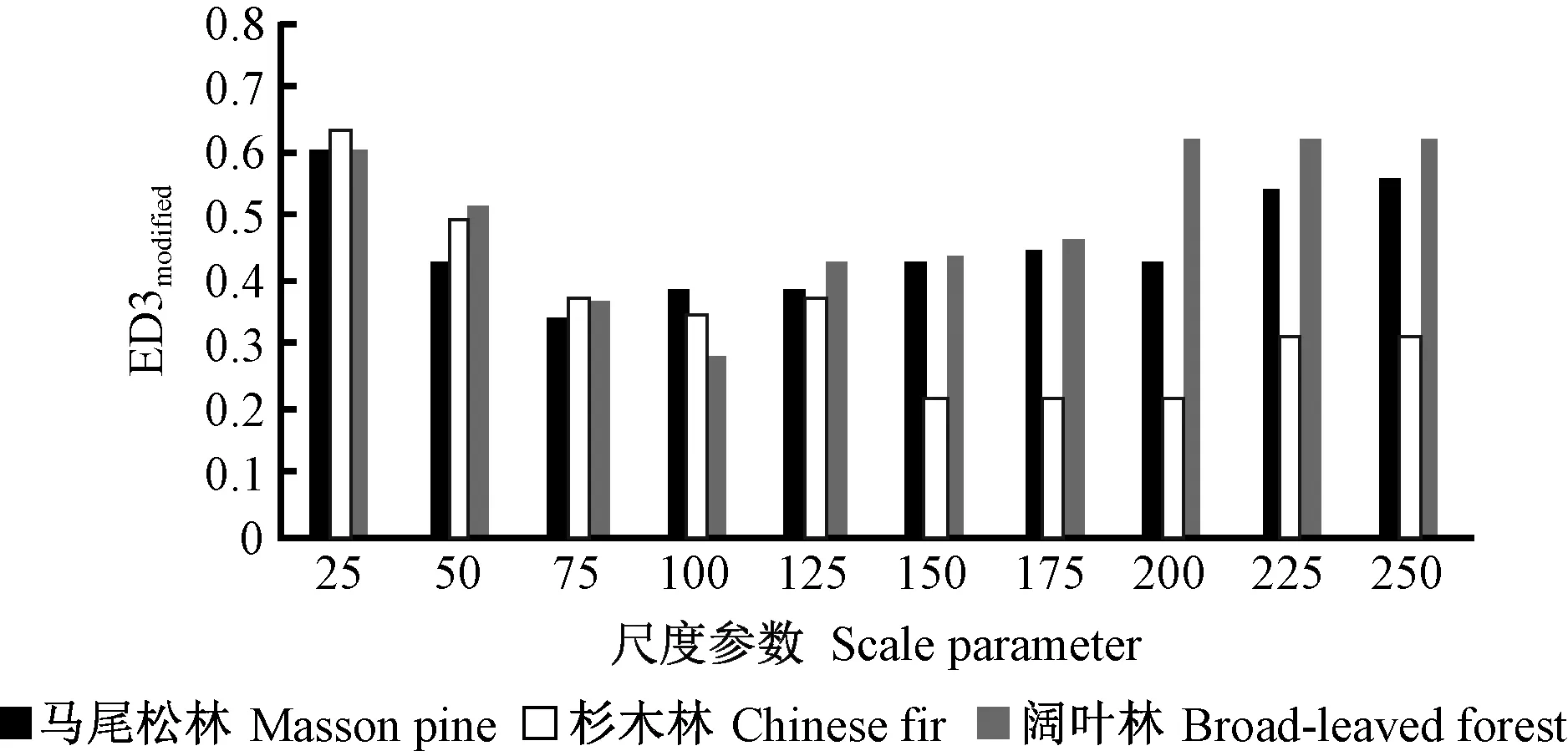
图4 QuickBird & Radarsat-2协同分割3种树种类型的ED3modifiedFig.4 ED3modified values for QuickBird & Radarsat-2 segmentation schemes of tree type

图5 尺度参数为50、100和200时3种分割方案的影像分割Fig.5 Image segmentation from three segmentation schemes at scales parameters of 50,100,200A. 尺度参数为50时QuickBird & Radarsat-2协同分割; B. 尺度参数为100 时QuickBird & Radarsat-2协同分割; C. 尺度参数为200时QuickBird & Radarsat-2协同分割; D. 尺度参数为50时Radarsat-2的影像分割; E. 尺度参数为100时Radarsat-2的影像分割; F. 尺度参数为200时Radarsat-2的影像分割; G. 尺度参数为50时QuickBird的影像分割; H. 尺度参数为100时QuickBird的影像分割; I. 尺度参数为200时QuickBird的影像分割。A. QuickBird & Radarsat-2-based segmentation at scale parameter 50; B. QuickBird & Radarsat-2-based segmentation at scale parameter 100; C. QuickBird & Radarsat-2-based segmentation at scale parameter 200; D. Radarsat-2-based segmentation at scale parameter 50; E. Radarsat-2-based segmentation at scale parameter 100; F. Radarsat-2-based segmentation at scale parameter 200; G. QuickBird-based segmentation at scale parameter 50; H. QuickBird-based segmentation at scale parameter 100; I. QuickBird-based segmentation at scale parameter 200.
对影像分割结果进行目视检查可知,影像分割受尺度参数影响。小的尺度参数能够分割出小面积林分对象(图5A、D、G 的示例区1),而大的尺度参数能够有效分割大块林分区域(图5C、F、I的示例区2),同时也合并了较小的相邻林分对象。图5 A、D、I的示例区2显示了将参考区域分割成若干块的常见情况,但是区域边界与对象边界重合得比较好。分割结果除了受尺度参数影响外,分割过程中所使用的数据也会影响分割对象面积和形状。例如: 图5B中的示例区1将完整的杉木林区域划分出来,示例区2中划分了完整的马尾松林区域,但在图5H的示例区1中混合了杉木林附近的阔叶林,示例区2中混合了马尾松林附近的杉木林。在尺度参数为50时,单独使用Radarsat-2数据产生了过度分割现象(图5G),在尺度参数为100和200时,单独Radarsat-2数据分割对象的形状有变狭长的趋势,并且边界与林分边界差异较大(图5H、I)。这可能是由于DEM的加入使边界沿等高线方向分割,并且Radarsat-2数据光谱和纹理信息的丰富程度不足以纠正这种错误趋势。QuickBird & Radarsat-2协同分割所得的对象,无论对于大面积或小面积林分都能重合得比较好(图5B)。
3.2 分类精度与评价
3种分割-分类方案总精度呈现一致性的变化规律,即在小尺度上分类总精度较低,随着尺度增大,总精度再提高并在某个尺度达到最大值,之后总精度逐渐随尺度增大而降低(图6)。在所有尺度(25~250)上,QuickBird & Radarsat-2协同分割的OA明显高于Radarsat-2数据分割,但与单独使用QuickBird遥感影像比优势并不明显。单独使用QuickBird遥感影像分割,尺度参数为150时OA最高(OA=81.11%; Kappa=0.82); 单独使用Radarsat-2数据分割,尺度参数为125时OA最高(OA=66.67%; Kappa=0.68); QuickBird & Radarsat-2协同分割,尺度参数为100时OA最高(OA=85.55%; Kappa=0.86),为30种分类结果中最高的分类精度。
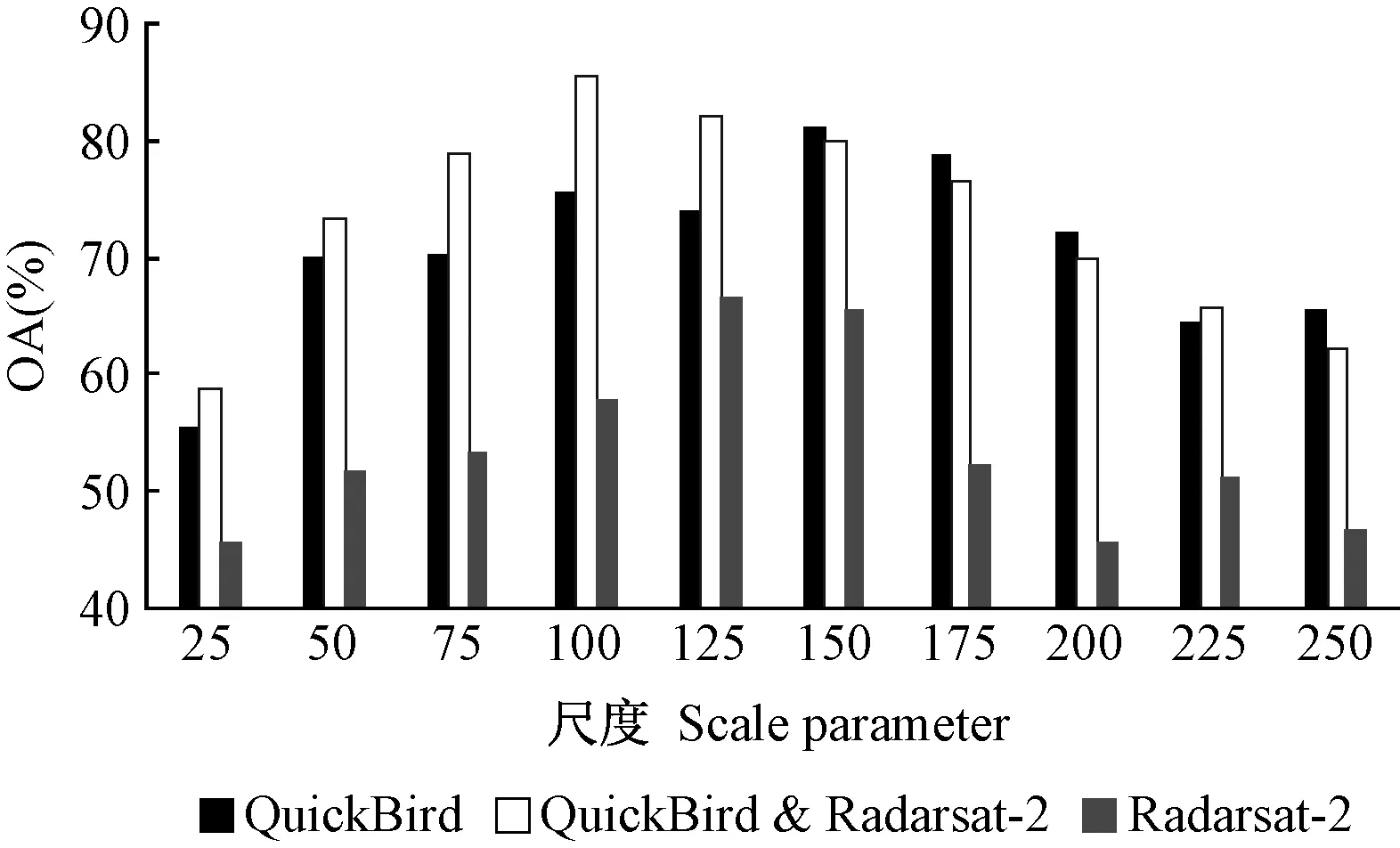
图6 3种分割-分类方案在尺度参数25~250上的分类总精度Fig.6 Classification accuracies for three segmentation schemes at the scale parameter ranging between 25-250
3.3 最优尺度上的3种分割-分类方案混淆矩阵
QuickBird & Radarsat-2协同分割-分类与单独使用Radarsat-2数据分割-分类相比,杉木林、马尾松林和阔叶林的PA、UA和OA都有明显提高(表2)。例如: 杉木林、马尾松林和阔叶林PA提高了16.66%(阔叶林)~20.51%(杉木林),UA提高了10.37%(马尾松林)~38.82%(阔叶林),OA提高了18.88%。QuickBird & Radarsat-2分割-分类与单独使用QuickBird影像分割-分类相比,3种树种类型PA提高得不明显,OA提高了4.44%,但阔叶林的UA有明显提高。由此说明应用QuickBird & Radarsat-2协同分割-分类能够提高树种的分类精度。
3.4 分割质量与分类精度的关系
QuickBird & Radarsat-2协同使用面向对象树种分类的OA与所有尺度参数(25~250)上分割结果的ED3modified之间的关系如图7所示。OA越高说明分类效果越好,同时ED3modified越低说明分割越好,采用相关系数(|R|)来确定OA与分割质量(ED3modified)的相关性。分割质量评价指标(ED3modified)与分类总精度(OA)高度相关(R2=0.73),表明分割质量高度影响之后的面向对象树种分类精度,ED3modified不仅能评价分割质量,而且也能表达OA。

表2 最优尺度上的3种分割-分类方案的混交矩阵Tab.2 Confusion matrix for three segmentation-classification at optimal scale parameter
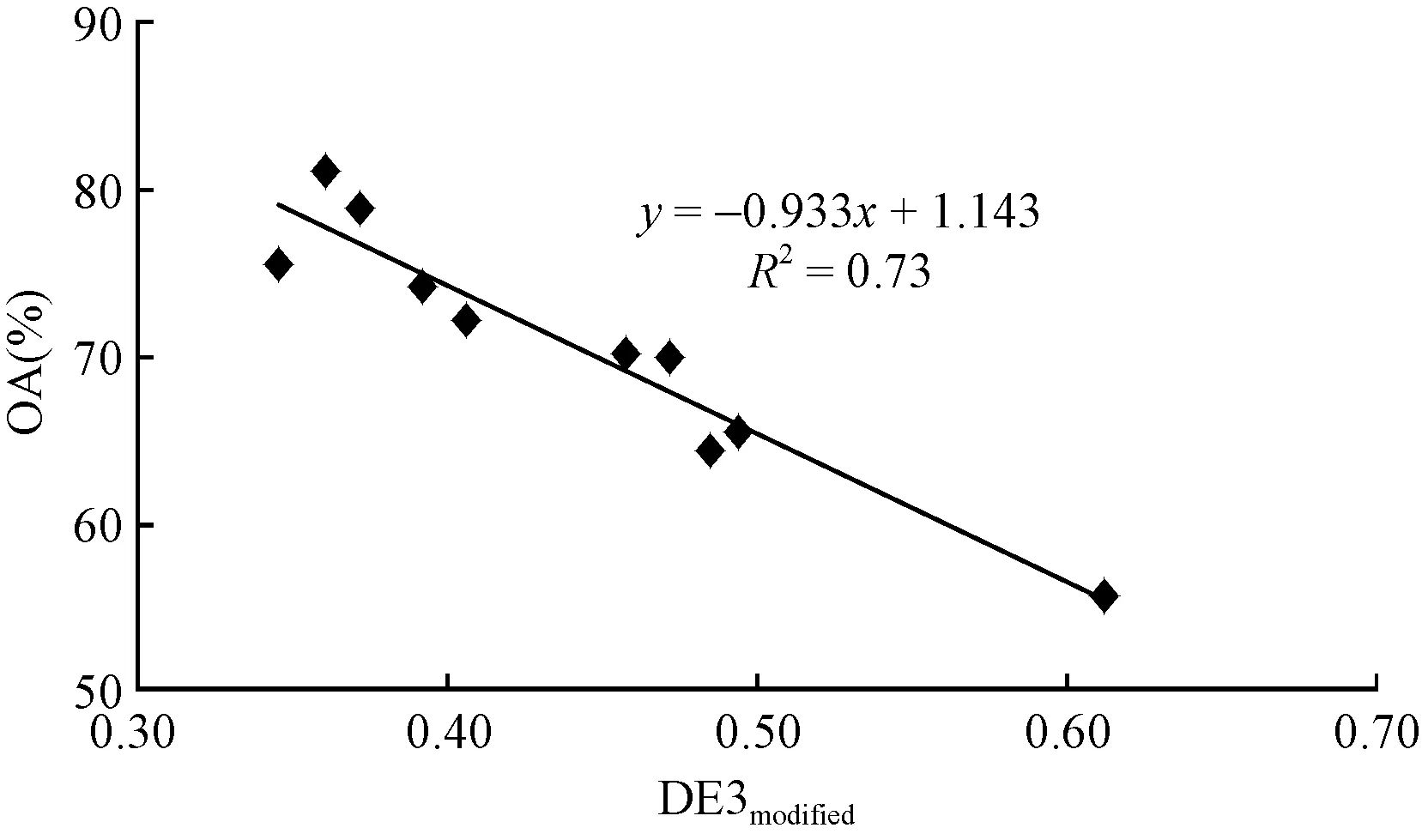
图7 分类精度(OA)和分割质量(ED3modified)的关系Fig.7 The relationship between classification accuracy (OA) and segmentation quality (ED3modified)
4 讨论
4.1 最优分割尺度的确定
尺度是影响分割质量的重要参数之一,并因此影响随后的分类结果(Keetal., 2010)。在eCognition Developer 8.7软件中,尺度参数是一个没有被定义的抽象名词,然而尺度参数却影响着分割的空间尺度,因为尺度参数与对象大小有关,大尺度产生大面积对象,小尺度产生小面积对象(Benzetal., 2004)。本研究的最优分割尺度定义为能获得最高分类精度的尺度,因此3种分割-分类方案都定义了单一的最优分割尺度(QuickBird: 150; Radarsat-2:125; QuickBird & Radarsat-2:100),虽然最优尺度参数的OA明显高于小尺度参数(25或50)或大尺度参数(225~250)的OA,但也存在一个尺度范围(最优尺度附近)能够获得相似的OA。QuickBird & Radarsat-2协同分割,尺度参数在75~125上有相似的OA和Kappa系数(OA: 79%~85%; Kappa: 0.79~0.86)。虽然之前的研究结果将获得最高分类总精度的单一尺度定义为最优尺度(Kimetal., 2008; Wangetal., 2004),但本研究认为定义一个最优尺度范围更加适合。
4.2 分割尺度对分类结果的影响
单独采用QuickBird遥感影像分割-分类在小尺度上精度较低,可以解释为由林隙及阴影影响引起的类内变化过大。由于对象面积随尺度增大而变大,林隙及阴影的影响变弱,并且对象特征能够代表林分平均,精度也随之升高。然而,尺度的增大也有限制,在一些尺度上对象面积超过一个单一林分大小,就会引起分类精度下降。在所有尺度上单独使用Radarsat-2数据分割-分类并没有获得理想的分类精度,主要有3方面原因: 1) 研究区高度信息没有比光谱信息提供更多的信息,树种的高度差别不大; 2) Radarsat-2提取的散射特征各树种之间区别不明; 3) Radarsat-2分辨率(距离×方位: 5.2 m×7.6 m)较低。QuickBird & Radarsat-2协同分割-分类高于单独使用其中一种数据源的分类精度,说明虽然单独使用Radarsat-2数据没有获得理想的分类精度,但二者结合能够提高树种分类精度,尤其在中小尺度上(图6)。精度提高可以解释为加入Radarsat-2数据能更好体现林分的同质性,有助于消除林隙及阴影等的影响。然而在较大尺度上加入Radarsat-2数据不能够创建出边界与林分边界一致的对象,因此分类精度也会降低,这也是尺度参数在150~200上QuickBird & Radarsat-2协同分割-分类低于单独使用QuickBird遥感影像分割-分类精度的原因。
4.3 分割质量与分类精度的关系
面向对象分类方法中的影像分割直接影响分类精度(Kimetal., 2008; Sousa, 2004)。本研究获得了相同的结论: 小尺度分割和大尺度分割分类精度都较低,最优尺度及附近尺度分割分类精度较高。3种分割-分类方案最优尺度的最高与最低的OA相差20%以上(图6),尺度参数的选择对分类结果影响较大,因此对分割尺度进行评价,寻找最优尺度是十分必要的。本研究采用ED3modified进行分割质量的评价以及寻找最优分割尺度与之前采用反复试验或目视解译方法来确定最优尺度参数方法相比(Choetal., 2012; Malahlelaetal., 2014)是比较合理的,图7很好地证明了这一观点。
ED3modified与OA高度相关可以理解为ED3modified对分割不足和过度分割时的几何差异评价不太严格(Yangetal., 2015),因此ED3modified比较适用于面向对象分类中的分割质量评价,因为分割的目的是分类而不是地理对象的分割。ED3modified与OA的关系(图7)说明了分割质量和分类精度之间的关系: 分割对象与参考对象更好的匹配能够得到更高的分类精度,反之精度会降低。Kim等(2008)研究也发现当分割所得对象与林分十分相似时能够得到最优精度,本研究得出了相似的结论: QuickBird & Radarsat-2协同分割在最优尺度为100时分割质量最好,并获得了最精确的分类结果。但是,在最优尺度参数范围内分类精度没有明显不同,这说明对林分稍微的分割不足或过度分割不会明显影响分类结果。
5 结论
本研究以福建省三明市将乐国有林场为试验区,采用QuickBird遥感影像与Radarsat-2数据协同进行面向对象树种分类,研究分割尺度对面向对象树种分割与分类结果的影响,进而评价了2种数据协同树种识别的适宜性。结果表明: 在所有尺度(25~250)上,QuickBird & Radarsat-2协同分割-分类的OA高于单独使用其中一种数据源的OA,相比单独使用Radarsat-2数据优势更加明显。对3种分割-分类方案30种分类结果的精度评价发现,相比定义一个单一的最优尺度,更倾向于定义一个最优尺度范围,因为在这个范围内有相似的分类精度。分割尺度对面向对象树种分类结果有着重要影响,在最优尺度上可获得最高的分类精度。通过研究ED3modified与OA之间的关系发现,匹配良好的分割和参考对象能够得到更高精度的分类结果,同时,轻微的过度分割或分割不足不会明显影响分类结果。应该指出的是,本研究对树种进行分割和分类分别采用的是MRS算法和SVM分类器,应进一步研究其他分割和分类方法是否与本研究获得相同的结论。
白黎娜, 李增元, 陈尔学, 等. 2003. 干涉测量土地利用影像分类决策树法森林识别研究. 林业科学, 39(1): 86-90.
(Bai L N, Li Z Y, Chen E X,etal. 2003. A study on forest identification with the decision tree for interferometric land-use image. Scientia Silvae Sinicae, 39 (1):86-90.[in Chinese])
王馨爽, 陈尔学, 李增元, 等. 2014. 多时相双极化SAR影像林地类型分类方法. 林业科学, 50(3): 83-91.
(Wang X S, Chen E X, Li Z Y,etal. 2014. Multi-temporal and dual-polarization SAR for forest land type classification. Scientia Silvae Sinicae, 50 (3):83-91.[in Chinese])
Baatz M, Benz U, Dehghani S,etal. 2004.eCognition User Guide 4.Munich:Definiens Imaging.
Ban Y, Hu H, Rangel I M. 2010. Fusion of Quickbird MS and RADARSAT SAR data for urban land-cover mapping: object-based and knowledge-based approach. International Journal of Remote Sensing, 31(6):1391-1410.
Benz U C, Hofmann P, Willhauck G,etal. 2004. Multi-resolution,object-oriented fuzzy analysis of remote sensing data for GIS-ready information. International Journal of Photogrammetry & Remote Sensing, 58(3/4):239-258.
Cho M A, Mathieu R, Asner G P,etal. 2012.Mapping tree species composition in South African savannas using an integrated airborne spectral and LiDAR system. Remote Sensing of Environment, 125(10):214-226.
Clark M L, Roberts D A, Clark D B. 2005. Hyperspectral discrimination of tropical rain forest tree species at leaf to crown scales. Remote Sensing of Environment, 96(3):375-398.
Clinton N, Holt A, Scarborough J,etal. 2010. Accuracy assessment measures for object-based image segmentation goodness. Photogrammetric Engineering and Remote Sensing, 76(3):289-299.
Colstoun E C B D, Story M H, Thompson C,etal. 2003. National park vegetation mapping using multi-temporal Landsat 7 data and a decision tree classifier. Remote Sensing of Environment, 85(3):316-327.
Comaniciu D, Meer P. 2002. Mean shift: a robust approach toward feature space analysis. IEEE Transactions on Pattern Analysis & Machine Intelligence, 24(5):603-619.
Ecognition B. 2010. User guide. Definiens Imaging GmbH. Sunnyvale:Trimble.
Gitelson A A, Kaufman Y J, Merzlyak M N. 1996. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sensing of Environment, 58(3):289-298.
Goodenough D G, Dyk A, Niemann K O,etal. 2003. Processing hyperion and ALI for forest classification. IEEE Transactions on Geoscience & Remote Sensing, 41(6):1321-1331.
Hossain S M Y, Caspersen J P. 2012. In-situ measurement of twig dieback and regrowth in matureAcersaccharumtrees. Forest Ecology & Management, 270(4):183-188.
Immitzer M, Atzberger C, Koukal T. 2012. Tree species classification with random forest using very high spatial resolution 8-band WorldView-2 satellite data. Remote Sensing, 4(9):2661-2693.
Im J, Jensen J R, Hodgson M E. 2008. Object-based land cover classification using high-posting-density LIDAR data. GIScience and Remote Sensing, 45(2):209-229.
Im J, Jensen J R, Tullis J A. 2007. Object-based change detection using correlation image analysis and image segmentation. International Journal of Remote Sensing, 29(2):399-423.
Janssen L L F, Wei F J M. 1994. Accuracy assessment of satellite derived land-cover data: a review. Photogrammetric Engineering & Remote Sensing, 60(4):419-426.
Johansen K, Arroyo L A, Phinn S,etal. 2010. Comparison of geo-object based and pixel-based change detection of riparian environments using high spatial resolution multi-spectral imagery. Photogrammetric Engineering and Remote Sensing, 76(2):123-136.
Ke Y, Quackenbush L J,Im J.2010.Synergistic use of QuickBird multispectral imagry and LiDAR data for object-based forest species classification.Remote Sensing of Environment,114(6):1141-1154.
Kim M, Madden M, Warner T. 2008. Estimation of optimal image object size for the segmentation of forest stands with multispectral IKONOS imagery. Object-Based Image Analysis. Berlin: Springer.
Lawrence R L, Wood S D, Sheley R L. 2006. Mapping invasive plants using hyperspectral imagery and breiman cutler classifications (randomForest). Remote Sensing of Environment, 100(3):356-362.
Li P, Guo J, Song B,etal. 2011. A multilevel hierarchical image segmentation method for urban impervious surface mapping using very high resolution imagery. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,4(1):103-116.
Li D, Zhang G, Wu Z,etal. 2010. An edge embedded marker-based watershed algorithm for high spatial resolution remote sensing image segmentation. IEEE Transactions on Image Processing, 19(10):2781-2787.
Liesenberg V, Gloaguen R. 2013. Evaluating SAR polarization modes at L-band for forest classification purposes in Eastern Amazon, Brazil. International Journal of Applied Earth Observation and Geoinformation, 21(1): 122-135.
Liu Y, Bian L, Meng Y,etal. 2012. Discrepancy measures for selecting optimal combination of parameter values in object-based image analysis. Isprs Journal of Photogrammetry and Remote Sensing, 68(1):144-156.
Malahlela O, Cho M A, Mutanga O.2014. Mapping canopy gaps in an indigenous subtropical coastal forest using high-resolution WorldView-2 data. International Journal of Remote Sensing, 35 (17):6397-6417.
Malthus R G T J. 2008. LiDAR mapping of canopy gaps in continuous cover forests: a comparison of canopy height model and point cloud based techniques. International Journal of Remote Sensing, 31(5):17-19.
Michel J, Youssefi D, Grizonnet M. 2015.Stable mean-shift algorithm and its application to the segmentation of arbitrarily large remote sensing images. IEEE Transactions on Geoscience and Remote Sensing, 53(53):952-964.
Möller M,Lymburner L,Volk M. 2007.The comparison index: a tool for assessing the accuracy of image segmentation. International Journal of Applied Earth Observation & Geoinformation,9(3):311-321.
Mutanga O, Adam E, Cho M A. 2012. High density biomass estimation for wetland vegetation using WorldView-2 imagery and random forest regression algorithm. International Journal of Applied Earth Observation and Geoinformation, 18(1):399-406.
Sousa W P. 2004.Integration of object-based and pixel-based classification for mapping mangroves with IKONOS imagery. International Journal of Remote Sensing,25(24):5655-5668.
Sun X Y, Du H Q, Han N,etal. 2014. Synergistic use of Landsat TM and SPOT5 imagery for object-based forest classification. Journal of Applied Remote Sensing, 8(1):801-807.
Vapnik V N. 2000. The nature of statistical learning theory. Berlin: Springer Verlag.
Vepakomma U, St-Onge B, Kneeshaw D. 2008. Spatially explicit characterization of boreal forest gap dynamics using multi-temporal lidar data. Remote Sensing of Environment, 112(5):2326-2340.
Vieira I C G, Almeida A S D, Davidson E A,etal. 2003. Classifying successional forests using Landsat spectral properties and ecological characteristics in eastern Amaznia. Remote Sensing of Environment, 87(4): 470-481.
Vincent L, Soille P. 1991.Watersheds in digital spaces: an efficient algorithm based on immersion simulations. IEEE Transactions on Pattern Analysis & Machine Intelligence, 13(6):583-598.
Wang L, Sousa W P, Gong P. 2004. Integration of object-based and pixel-based classification for mapping mangroves with IKONOS imagery. International Journal of Remote Sensing, 25(24):5655-5668.
Wolter P T, Mladenoff D J, Host G E,etal. 1995. Improved forest classification in the northern Lake States using multi-temporal Landsat imagery. Photogrammetric Engineering & Remote Sensing, 61(9):1129-1143.
Yang J, He Y, Weng Q. 2015. An automated method to parameterize segmentation scale by enhancing intrasegment homogeneity and intersegment heterogeneity. IEEE Geoscience & Remote Sensing Letters, 12(6):1282-1286.
Young T Y, Fu K S. 1986. Handbook of pattern recognition and image processing. Pittsburgh: Academic Press.
Yu Q, Gong P, Clinton N,etal. 2006. Object-based detailed vegetation classification with airborne high spatial resolution remote sensing imagery. Photogrammetric Engineering & Remote Sensing, 72(7):799-811.
Zhan Q, Molenaar M, Tempfli K,etal. 2007. Quality assessment for geo-spatial objects derived from remotely sensed data. International Journal of Remote Sensing, 26(14):2953-2974.
