雷达干扰无人机支援干扰作战运用定量分析
2018-01-16盛怀洁
韩 旭,盛怀洁
(国防科技大学电子对抗学院,合肥 230037)
0 引言
随着无人机平台性能的提高和机载任务设备的不断发展,无人机系统对战争行动的影响越来越大。在信息作战领域,电子战无人机利用其升空增益优势在削弱、破坏敌方电磁频谱使用方面发挥了重要作用,成为军用无人机家族中的尖兵一族。在电子战无人机系列中,雷达干扰无人机主要用于对敌方雷达实施电子进攻,削弱、破坏敌方雷达使用效能、掩护我方航空作战行动。目前,对雷达干扰无人机的作战运用研究方兴未艾[1-6]。本文从雷达干扰能量域出发,对雷达干扰无人机干扰压制目标雷达、掩护己方航空兵突防中的协同和兵力配备问题进行了研究,得出的结论对雷达干扰无人机的作战运用具有一定的指导意义。
1 雷达干扰无人机支援干扰优势分析
当我方航空兵执行作战任务时,如果不采取任何突防措施,敌方雷达能够在较远距离上发现我方航空兵动向,从而有比较充裕的时间部署和派遣地面防空力量以及空中拦截力量对我方航空兵进行打击。为了缩短敌方雷达的探测距离,可以采用干扰手段对敌方雷达进行压制,缩短其防空和拦截力量的反应时间,提高我方航空兵突防成功率。对敌方雷达实施干扰、掩护我航空兵突防时可以采用支援干扰的方式。
支援干扰是指为支援进攻兵力遂行作战任务,在距攻击目标一定距离上对敌方电子设备所进行的电子干扰,分为近距支援干扰和远距支援干扰[7]。雷达干扰无人机是一种以雷达干扰机为任务载荷,具有对敌方雷达进行抵近干扰能力的、能够按实时制定或者预先规划的任务航路进行飞行的一种电子战无人机,是执行支援干扰任务比较理想的平台。
雷达干扰无人机执行支援干扰任务时,其RCS和红外特征均较小且无人员伤亡危险,不需要护航,可以飞临任务地区后打开干扰机,对目标实施抵近干扰[8]。由于干扰距离近,干扰机可以用较小的功率取得较好干扰效果,有利于减小干扰设备的体积、重量、供电功率等设备要求和经济成本。通过将不同频段的雷达干扰无人机组阵使用,能够对敌方雷达产生角度更宽、距离更大的干扰扇面,形成更加理想的干扰效果。同时,雷达干扰无人机可以在保证干扰效果的前提下,使无人机在空间上远离我方航空兵编队,防止暴露目标和作战意图。
2 无人机支援干扰效果影响因素
当无人机执行支援干扰任务,掩护我方飞机时,其空间位置模型如图1所示。

图1 无人机、被掩护飞机、目标雷达空间位置关系图
无人机距雷达的直线距离为Rj,被掩护飞机距雷达的直线距离为Rt,雷达与被掩护飞机的连线和雷达与无人机的连线之间的夹角为θ。
此时,雷达将接收到两种信号:干扰信号和目标回波信号。雷达收到的目标回波信号功率为

其中,Pt为雷达的发射功率,Gt为雷达天线主瓣方向的增益,σ为突防飞机的RCS,λ为雷达工作波长。
雷达收到的干扰信号功率为

其中,Pj为干扰机发射功率,Gj为干扰机天线主瓣方向的增益,λ为雷达工作波长,γj为干扰信号对雷达天线的极化损失,Gt(θ)为雷达天线在干扰机方向上的增益,其简化模型[9]可表示为

当水平方向半功率波瓣宽度θ0.5=30°,最大增益Gt=15 dB时,雷达天线在干扰机方向的增益Gt(θ)随θ的变化曲线如图2所示。

图2 雷达天线增益变化曲线图
由图可知,当雷达干扰无人机偏离雷达天线主瓣一定角度后,Gt(θ)迅速减小,干扰效果迅速降低。为保证对敌方雷达实施有效干扰,应使θ保持在一定角度范围内,并使雷达接收到的干扰信号功率与目标回波信号功率之比(干信比)大于等于压制系数 kj,即

上式称为雷达干扰方程,其中

干扰条件下雷达对被掩护飞机方向的探测距离为

其中

取无人机、被掩护飞机和雷达参数如下:Pt=300kW,Pj=5 W,Gt=30 dB,Gj=10 dB,γj=0.5,,kj=2[10],σ=10,则雷达的探测距离RJtmax与干扰角度θ和无人机距雷达的距离Rj的变化关系如下页图3(a)。
当干扰角度θ为10°时,雷达的探测距离RJtmax随无人机距雷达的距离Rj的变化如图3(b)。
当无人机距雷达的距离Rj为15 km时,雷达的探测距离RJtmax随干扰角度θ的变化如图3(c)。
分析可知,当干扰机功率等其他条件一定时,雷达的探测距离RJtmax受两个因素影响:干扰角度θ和无人机距雷达的距离Rj。当干扰角度一定时,雷达探测距离随无人机距雷达距离的增大而增大;当无人机距雷达距离一定时,雷达探测距离随干扰角度的减小而减小。因此,无人机在执行支援干扰任务时,其部署位置应尽可能地靠近敌方目标雷达,无人机与被掩护飞机关于目标雷达的夹角应尽可能小,以最大限度地削弱目标雷达的探测距离,增强干扰效果。
无人机执行支援干扰任务时,无人机、被掩护飞机和目标雷达之间的空间关系、运动关系时刻变化,因此,合理的规划雷达干扰无人机的任务航路和运动参数成为需要解决的问题。

图3(a) 雷达的探测距离RJtmax与θ和Rj的变化关系图

图3(b) 雷达探测距离RJtmax随Rj的变化关系图

图3(c) 雷达探测距离RJtmax随θ的变化关系
3 无人机支援干扰航路规划
3.1 无人机支援干扰航路要求
雷达干扰无人机在执行支援干扰任务时,其部署通常需要满足以下3点要求。
3.1.1 干扰功率要求
无人机执行干扰任务时,要时刻保证对目标雷达的有效干扰,也就是保证对突防飞机的有效掩护。从功率角度考虑,在雷达接收机端的目标回波信号功率和干扰信号功率需要满足下式

3.1.2 无人机安全性要求
当无人机对目标雷达进行干扰时,无人机应保证不被雷达探测到,否则无人机自身会受到严重的威胁,支援干扰任务也可能无法完成[11]。从无人机自身的安全性考虑,无人机距雷达的最小距离称为无人机的自卫距离,记为Rjmin。

其中,σ1为无人机雷达散射截面积。
3.1.3 干扰天线方向性要求
由于无人机干扰天线在垂直面内的方向特性,当无人机距离目标雷达小于某一距离时,目标雷达将处于干扰主波束之外,干扰盲区之中,该距离为过顶距离[12],记为 Dj,如图 4 所示。

图4 过顶距离示意图

其中,H为无人机飞行高度,α为干扰天线在垂直平面内的下视角度,θ0.5为半功率波瓣宽度,δ=α+0.5θ0.5为过顶角度。在对无人机进行配置时,无人机与目标雷达之间的距离应大于过顶距离。
3.2 无人机支援干扰航路规划
3.2.1 单无人机支援干扰航路规划
从战场实际条件、无人机飞行性能及操控性角度出发,无人机执行支援干扰任务时,通常采用直线形航路。
无人机沿直线形航路飞行时,其干扰航路与被掩护飞机航路平行,如图5所示。

图5 无人机支援干扰直线型航路示意图
图中,航路1为被掩护飞机航路,L1为目标雷达距其的垂直距离,航路2为无人机的干扰航路,L2为目标雷达距其的垂直距离,Rn为雷达未受到干扰时的探测距离。
无人机沿直线形航路执行干扰任务时,假设被掩护飞机与无人机均为匀速直线飞行,速度分别为v1,v2。通过前文对干扰效果影响因素的分析,为了使被掩护飞机在目标雷达的探测范围内全程有效被掩护,只需被掩护飞机在雷达探测范围内的起点A和终点B满足雷达干扰方程,这就要求无人机在空间上和速度上与被掩护飞机进行协同。
①无人机与被掩护飞机的空间协同
当被掩护飞机在雷达探测范围内的起点A时,无人机的初始位置应满足雷达干扰方程

②无人机与被掩护飞机的速度协同
当被掩护飞机在雷达探测范围内的终点B时,目标雷达与被掩护飞机的连线和目标雷达与无人机的连线之间的夹角θ应满足雷达干扰方程的干信比要求,如下式


图6 低速无人机与被掩护飞机的速度协同图
为使被掩护飞机在目标雷达的探测范围内全程有效被掩护,无人机的最小匀速飞行速度为

为使被掩护飞机在目标雷达的探测范围内全程有效被掩护,无人机的最大匀速飞行速度为


图7 高速无人机与被掩护飞机的速度协同图
当无人机的速度v2满足v2min≤v2≤v2max时,可以保证从A点到B点对被掩护飞机的有效保护。
3.2.2 多无人机支援干扰兵力分配
由雷达干扰方程可知,单架无人机所能掩护的角度范围为


图8 单架无人机有效掩护区示意图
如图8所示,在图中阴影部分内,我方航空兵可以得到有效掩护。
当无人机由于自身飞行性能的限制,其速度v2不能满足v2min≤v2≤v2max时,应采用多架无人机对目标雷达进行协同接力干扰。
假设目标雷达对我方航空兵航路的探测外包角为β,如下页图9所示。
为使我方航空兵得到全程有效掩护所需要的无人机数量为

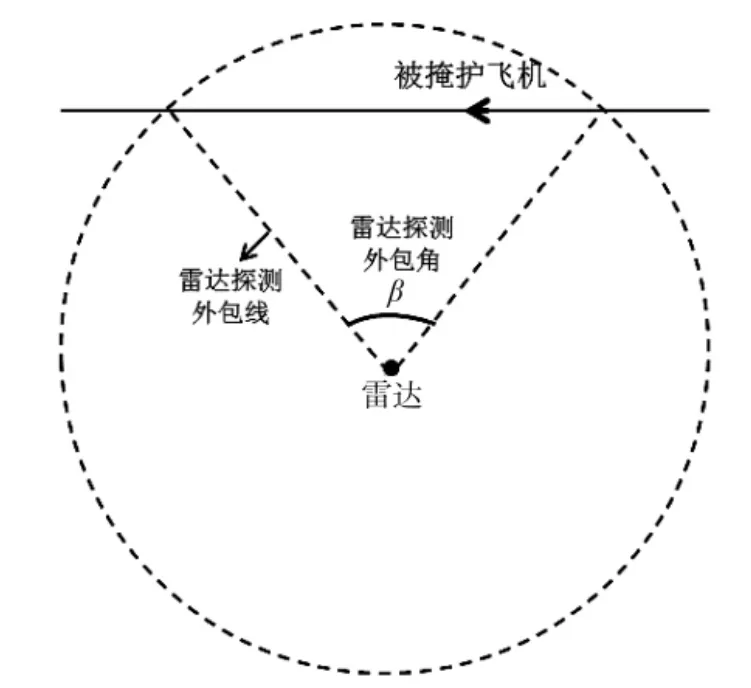
图9 目标雷达探测外包角示意图
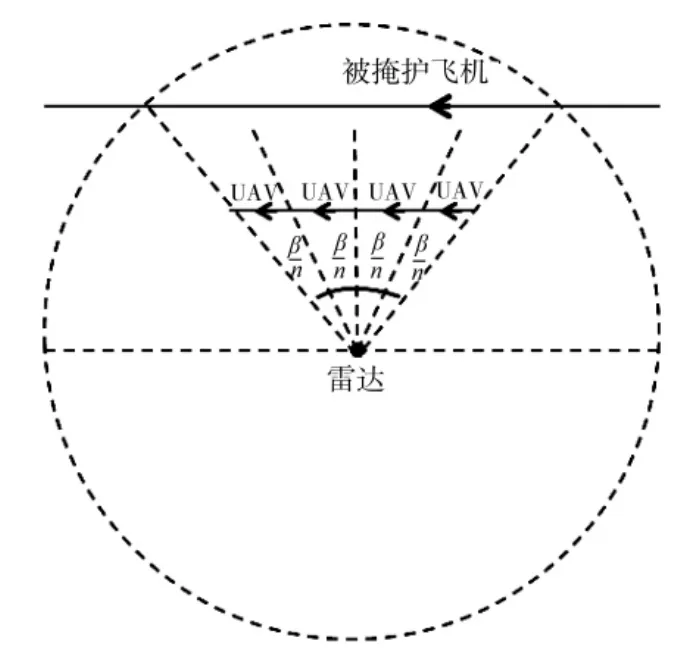
图10 多无人机协同干扰示意图
3.3 无人机支援干扰航路规划举例
取雷达干扰无人机、被掩护飞机和目标雷达参数如表1所示。
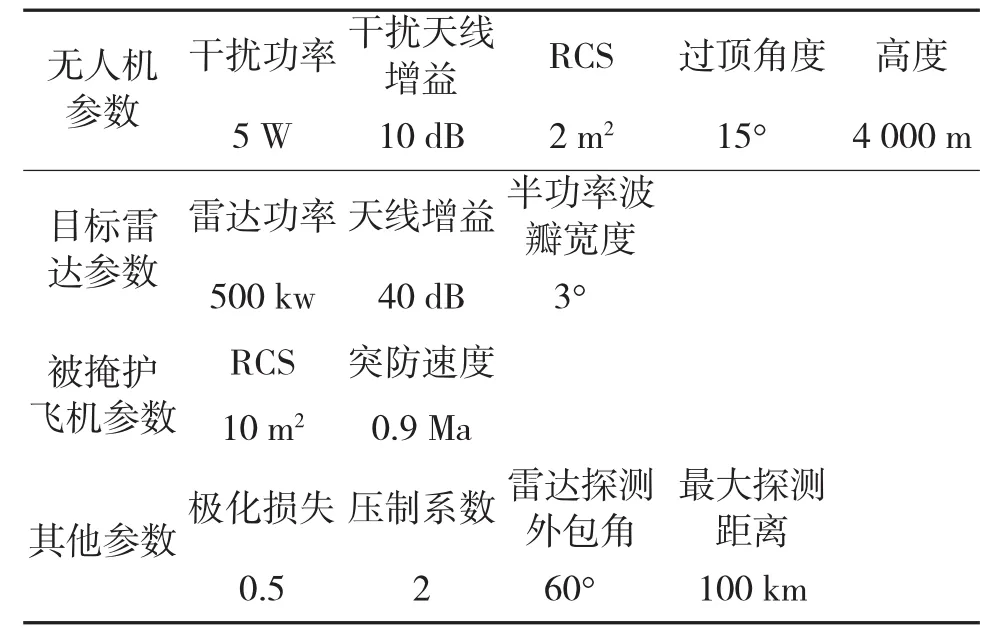
表1 支援干扰参数设置
3.3.1 无人机与被掩护飞机的空间协同

无人机与被掩护飞机满足空间协同条件。
3.3.2 无人机与被掩护飞机的速度协同

当无人机的速度 v2满足 145.7 km/h≤v2≤249.1km/h时,可以保证对被掩护飞机的全程有效保护。
但是,当无人机由于自身飞行性能原因,其速度不能满足上述条件时,应采用5架无人机对目标雷达进行协同接力干扰,每一架无人机在其对应的12°范围内做往复飞行,即可保证对我方航空兵的全程有效掩护,如图11所示。
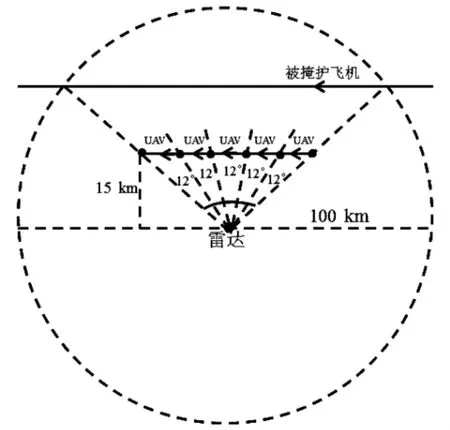
图11 多无人机协同干扰部署图
4 结论
雷达干扰无人机近距支援干扰相对于其他干扰方式而言,在掩护我方航空兵飞行方面有其独特优势,本文从干扰的能量域角度出发,分析了对雷达的干扰效果影响因素,提出了无人机与被掩护飞机在空间和速度上的协同,得出了无人机的兵力分配方法,研究结论为“科学计算,量敌用兵”提供了依据,可为基层指挥员提供辅助决策。本文研究主要基于能量域干扰效果,实际运用还需结合雷达抗干扰因素、战场环境等其他方面。
[1]余旭东.未来作战中无人机作战使用十大方式[J].飞航导弹,2005(4):30-32.
[2]周武,董文锋.无人机掩护突防时对雷达的分布式干扰策略[J].电子信息对抗技术,2013,28(6):63-73.
[3]葛津华,王红军,刘文正,等.多部干扰机支援干扰压制区建模与效果仿真[J].舰船电子对抗,2010,33(4):33-39.
[4]党双平,汤亚波.压制性雷达干扰无人机的支援干扰动态效能建模[J].火力与指挥控制,2014,39(7):148-151.
[5]杨军,赵锋,宫颖.舰载无人机雷达对抗的建模研究[J].系统仿真学报,2007,19(5):949-951.
[6]薛羽,庄毅,张友益,等.基于启发式自适应离散差分进化算法的多UCAV协同干扰空战决策[J].航空学报,2013,34(2):343-351.
[7]全军军事术语管理委员会,军事科学院.中国人民解放军军语[M].北京:军事科学出版社,2011.
[8]金鑫,成蓉华.电子干扰无人机干扰优势分析[J].电子信息对抗技术,2011,26(2):66-69.
[9]邵国培.电子对抗作战效能分析原理[M].北京:军事科学出版社,2013.
[10]张云秀.雷达对抗中3种压制系数的比较[J].信息与电子工程,2011,9(4):413-417.
[11]宋铮,张建华,黄冶.天线与电波传播[M].2版.西安:西安电子科技大学出版社,2011.
[12]李子杰,郑灿,薛万成,等.无人机对陆基预警雷达压制干扰效能定量分析[J].电子信息对抗技术,2010,25(6):50-54.