全伺服横走式注塑机械手的静态位姿误差分析和误差补偿
2018-01-11葛正浩申娇娟韩啸宇
葛正浩, 申娇娟, 韩啸宇
(陕西科技大学 机电工程学院, 陕西 西安 710021)
0 引言
随着科技的发展,智能制造成为了模具制造行业可持续发展的趋势,自动化必然是未来模具企业的发展趋势.对于注塑成型而言,利用注塑机械手可以减少人工成本、使工作流程趋于标准化,提高生产效率,提高生产的可靠性,降低企业生产成本[1-4].目前注塑机械手主要完成模内取产品、模外取产品、模内贴膜及埋入嵌件等任务[5-7],其中,用于模内埋入嵌件的注塑机械手的定位精度要求较高.由于实际应用中的机械手可能存在装配误差、制造误差和传动误差等,而这些误差越大,机械手的定位精度越低,所以在研究机械手的定位精度之前,先研究机械手的静态位姿误差[8-12]和机械手的误差补偿[13-15].
1 注塑机械手的位姿描述
全伺服横走式注塑机械手的虚拟样机如图1所示,机械手的横行方向、引拔方向和上下方向分别为Y、X、Z方向.该机械手为双臂结构,主臂的手部用于取件和埋入嵌件,副臂的手部用于夹取废料.本文主要对主臂手部的位姿进行研究,其运动行程简单,包括X、Y、Z三个方向的平移和绕Y轴的旋转,机械手的结构如图2所示.
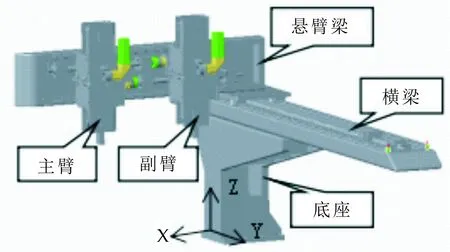
图1 全伺服横走式注塑机械手
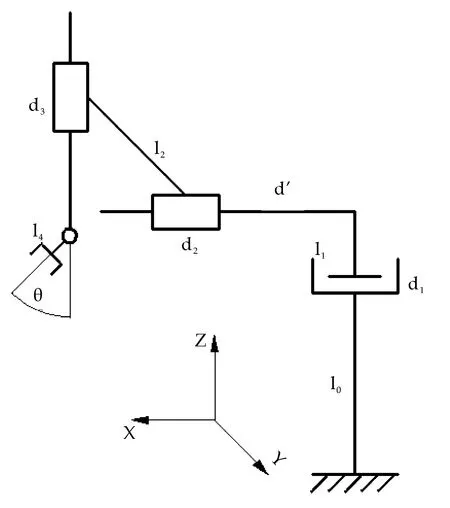
图2 机械手的结构简图
由于主臂和副臂的起始位置在悬臂梁的中心,所以求解主臂手部位姿矩阵时需要考虑主臂在X方向的起始距离(d′=400 mm),该机械手的结构参数和运动变量如表1所示.
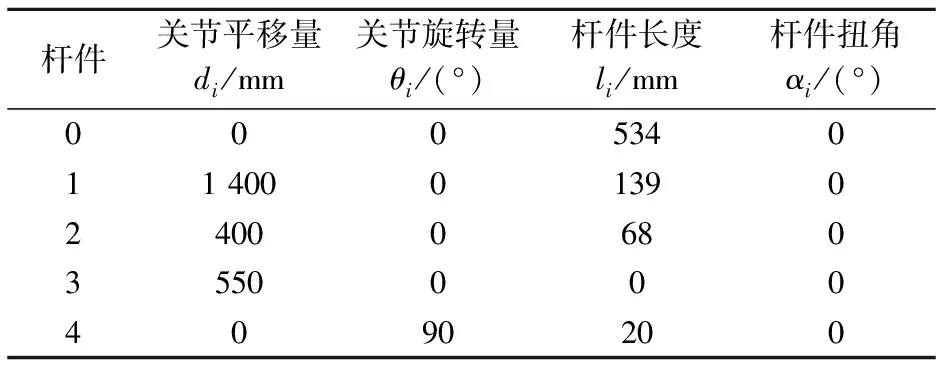
表1 机械手结构参数和运动变量
表1中:di:相邻杆件的长度在关节轴线上的距离;θi:相邻杆件的长度在关节轴线上的夹角;li:两关节轴线间的距离;αi:两关节轴线间的夹角.
机械手各个杆件的齐次变换矩阵如下:
注塑机械手的手部位姿矩阵为:
2 注塑机械手的静态位姿误差分析
机械手静态位姿误差建模的方法包括基于旋量理论、矩阵微分法、摄动法[8,9].由于矩阵微分法相比其他两种方法建模过程简单、易懂、分析过程清晰,所以采用矩阵微分法对机械手末端的位姿误差进行研究.
2.1 注塑机械手静态位姿误差模型的建立
机械手的静态位姿误差影响因素包括构件的制造误差、传感器的分辨率误差以及机构的传动误差,这些因素可归结为机械手各杆件的运动变量和结构参数产生的误差,从而影响机械手末端的位姿误差[10-12].
如果将静态位姿误差的影响因素考虑进去,相邻杆件的变换矩阵由Ai变为Ai+dAi(dAi是通过对Ai求参数的全微分所得),所有杆件的变换矩阵由TN变为TN+dTN,


ΔTN为注塑机械手手部位姿微变化,表达式如下:
上式包含了机械手的位置误差和姿态误差,分别为[dxNdyNdzN]T,[δxNδyNδzN]T.
2.2 注塑机械手静态位姿误差的分析
对全伺服横走式注塑机械手的静态位姿误差进行研究,首先计算各dAi,然后计算TN+dTN(过程较繁琐,此处省略),最后得出ΔTN的值如下:
上式中a、b如下:
a=cosθ(Δd2+Δd′)+sinθ(Δl0+Δl1-Δd3)+Δθl4;
b=-sinθ(Δd2+Δd′)+cosθ(Δl0+Δl1-Δd3)-Δl4;
机械手的结构参数和运动变量以及各自的偏差如表2所示.

表2 机械手结构参数和运动变量以及各自的偏差
该注塑机械手除了手部的一个旋转关节外,其余的关节均为移动关节,假设各种关节的运动规律如下:


(T为关节运动周期,取T=5 s.)
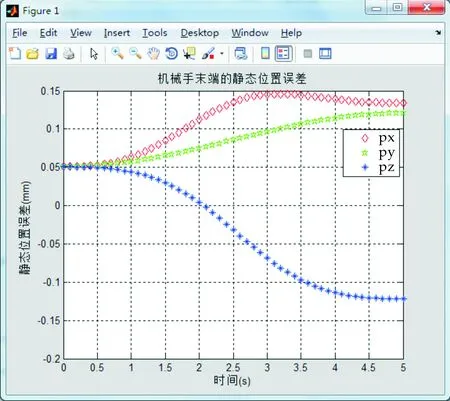
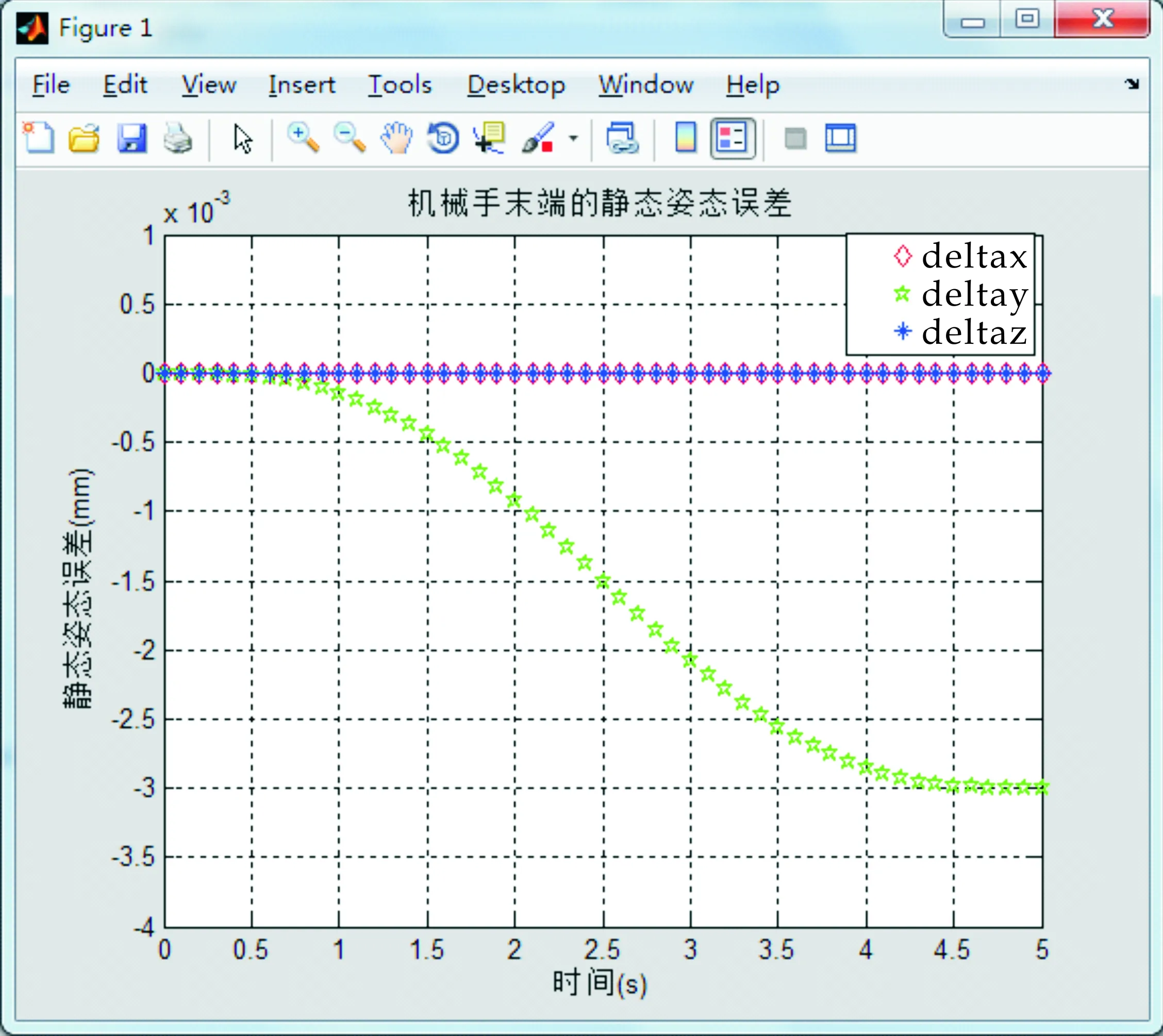
利用MATLAB得出全伺服横走式注塑机械手末端静态位姿误差的分析曲线图,如图3所示.由图3可知,X、Y和Z方向的误差随着时间增加越来越大,Y方向的误差峰值最大;绕X和Z轴的旋转误差为0,绕Y轴旋转的误差峰值为-0.003 rad.

(a)注塑机械手末端的静态位置误差
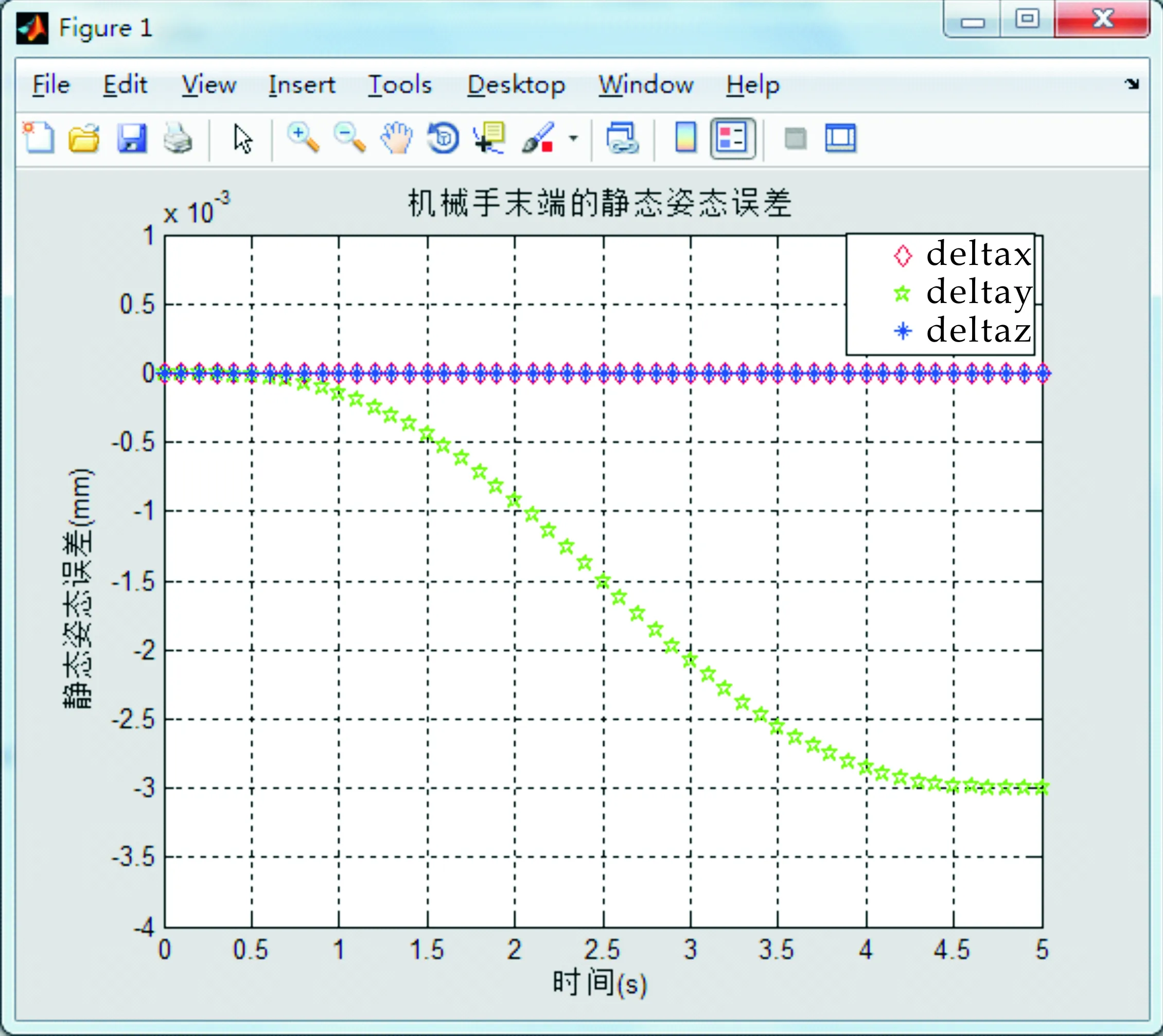
(b)注塑机械手末端的静态姿态误差图3 注塑机械手末端的静态位姿误差
采用控制变量法来分析各因素对手部位姿误差的影响程度.保持运动变量误差不变,将结构参数误差扩大2倍,得到的静态位姿误差曲线如图4所示.比较图3和图4可发现:随着结构参数误差的增大,X、Y、Z方向的位置误差均增大;姿态误差不变,所以结构参数误差对机械手手部的位置误差影响较大.
(a)结构参数误差扩大2倍时注塑机械手末端的静态位置误差
(b)结构参数误差扩大2倍时注塑机械手末端的静态姿态误差图4 结构参数误差扩大2倍时注塑机械手末端的静态位姿误差
保持结构参数不变、运动变量的角度误差不变,将移动误差扩大2倍,得到静态位姿误差曲线如图5所示.比较图3和图5发现:随着移动误差的增大,Y、Z方向的位置误差均增大,X方向的位置误差变化不明显;姿态误差不变,所以移动误差对机械手手部的位置误差影响也较大.

(a)移动误差扩大2倍时注塑机械手末端的静态位置误差

(b)移动误差扩大2倍时注塑机械手末端的静态姿态误差图5 移动误差扩大2倍时注塑机械手末端的静态位姿误差
保持结构参数不变、运动变量的移动误差不变,将角度误差扩大2倍,得到的静态位姿误差曲线如图6所示.比较图3和图6可发现:随着角度误差的增大,Y、Z方向的位置误差基本不变,X方向的位置误差增大;Y方向姿态误差成倍增大,所以角度误差对机械手手部姿态误差影响较大.

(a)角度误差扩大2倍时注塑机械手末端的静态位置误差

(b)角度误差扩大2倍时注塑机械手末端的静态姿态误差图6 角度误差扩大2倍时注塑机械手末端的静态位姿误差
所以静态位姿误差的影响因素中结构参数对机械手的位置误差影响最大;角度误差对机械手的姿态误差最大,且成倍增大;移动误差对机械手位置误差的影响相对来说较小.
3 注塑机械手位姿误差补偿
由上述分析可知,机械手的末端手部在运动过程中将会产生位姿误差,这会影响产品的质量,所以需要在误差分析的基础上对误差进行补偿,从而提高机械手末端执行器的精度.
3.1 机械手位姿误差补偿原理
目前误差补偿的方法主要有软件补偿法和硬件补偿法,软件法是通过调整机械手末端的名义位姿参数来实现的,计算时间较长;硬件法是采用误差补偿器来实现的,成本较高;考虑成本问题,选用软件法对机械手进行误差补偿[13-15].软件误差补偿又分为参数误差直接修正法和摄动误差补偿法,从机械手的静态位姿误差分析可知,影响位姿误差的因素除了结构参数误差外还有很多,因此选用摄动误差补偿法对注塑机械手进行位姿误差补偿.

首先假设某时刻注塑机械手各关节的运动变量{d1,d2,d3,θ},求出机械手末端手部的理想位姿TN和静态位姿误差ΔTN;

接着用补偿后各关节运动变量{d1+Δd1′,d2+Δd2′,d3+Δd3′,θ+Δθ′}构造新的机械手位姿矩阵,求出补偿后的机械手名义位置p′,以及补偿后的机械手末端位置误差Δp′;

3.2 注塑机械手的位姿误差补偿
设输入关节变量为{1 400,400,550,90 °},由此求出机械手末端理想位姿矩阵TN和位姿误差矩阵ΔTN如下:
所以Δp=[0.083 3,0.095 4,-0.070 8]T,最后求得ε=0.15>0.1 mm(用于模内埋入嵌件的机械手定位精度要求达到±0.1 mm),超过机械手误差允许范围,需要进行补偿.
带入前面相应的公式可得:
Δd1′=-Δd1-Δl2;
Δd2′=-Δd2-Δd′;
Δd3′=Δl0+Δl1-Δd3-Δl4;
Δθ′=-Δθ
然后将上述的关节补偿分量带入运动变量中,求解补偿后的机械手末端名义位姿矩阵TN′和位姿误差矩阵ΔTN′.
TN′=
上式中a、b如下:
a=d′+d2-Δd′-Δd2+l4sin(θ-Δθ);
b=l0+l1-d3-Δl0-Δl1+Δd3+Δl4-l4cos(θ-Δθ);
上式中a、b如下:
a=cos(Δθ-θ)(Δd′+Δd2)-sin(Δθ-θ)(Δl0-Δd3+Δl1)+Δθl4;
b=sin(Δθ-θ)(Δd′+Δd2)+cos(Δθ-θ)(Δl0-Δd3+Δl1)-Δl4;

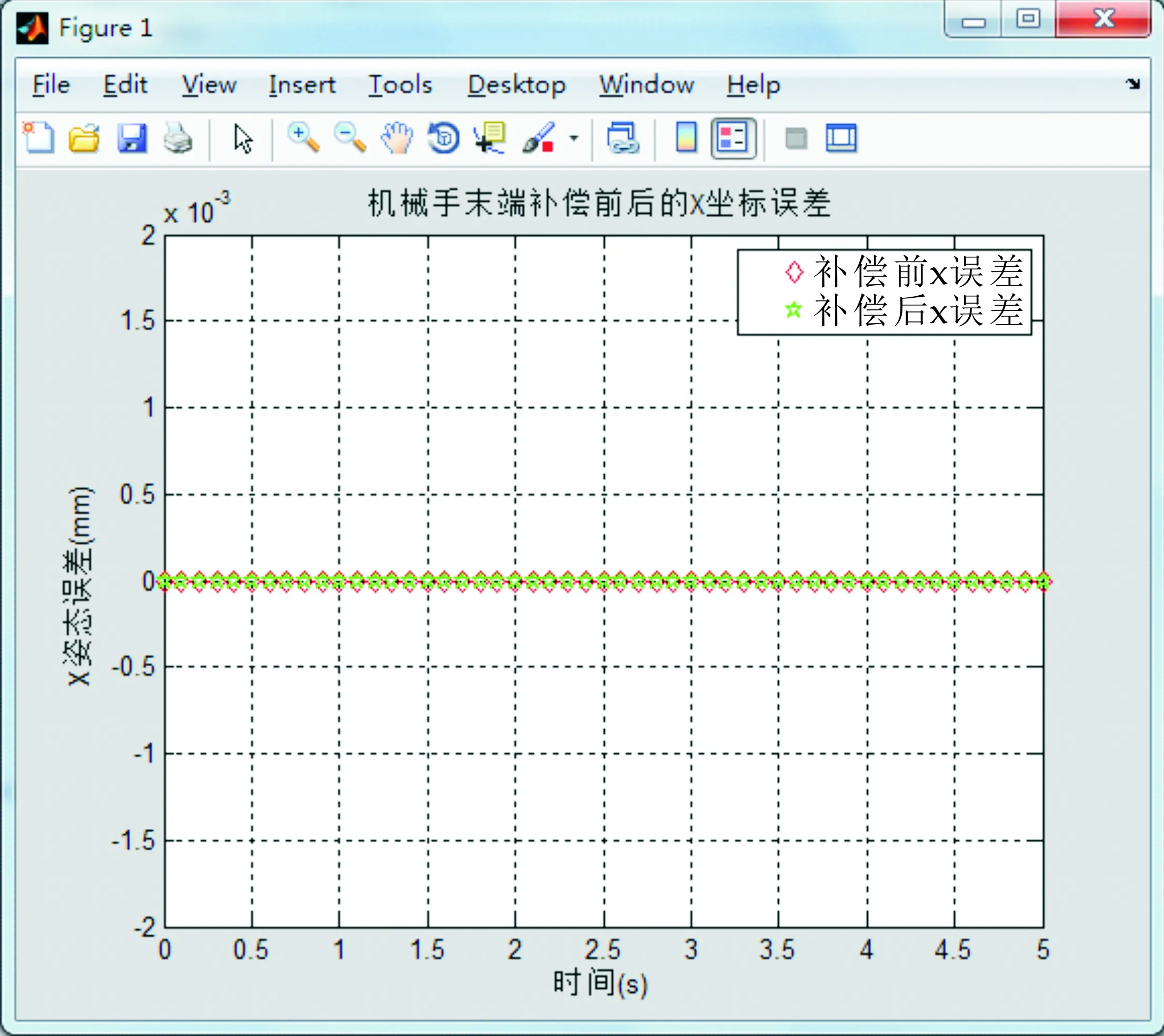
补偿前后机械手末端的位置误差比较如图7所示,在X、Y、Z三个方向机械手的末端位置误差均减小.补偿前后机械手末端的姿态误差比较如图8所示,在X、Z方向机械手的末端姿态误差均为零,没有变化;Y方向机械手的末端姿态误差减小.
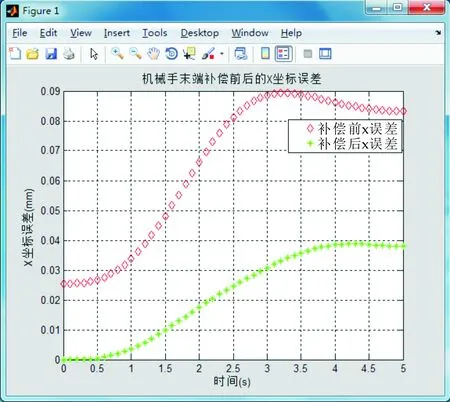
(a)X方向补偿前后机械手末端的位置误差比较
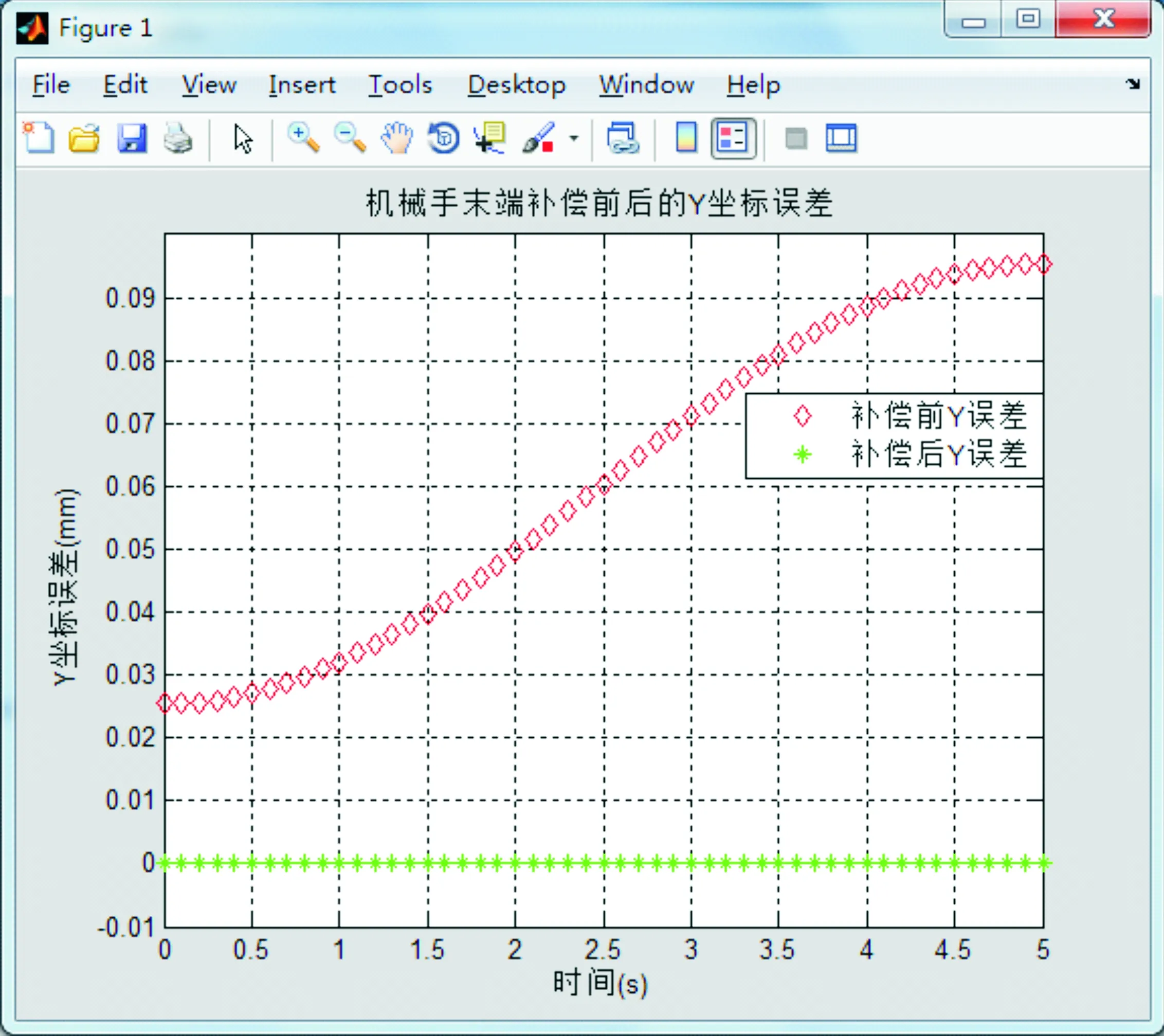
(b)Y方向补偿前后机械手末端的位置误差比较

(c)Z方向补偿前后机械手末端的位置误差比较图7 X、Y、Z方向补偿前后机械手末端的位置误差比较
(a)X方向补偿前后机械手末端的姿态误差比较

(b)Y方向补偿前后机械手末端的姿态误差比较

(c)Z方向补偿前后机械手末端的姿态误差比较图8 X、Y、Z方向补偿前后机械手末端的姿态误差比较
4 结论
本文通过对全伺服横走式注塑机械手建立运动学模型和静态位姿误差模型,对机械手进行静态位姿误差分析,对比结果后发现:结构参数误差对注塑机械手末端位置误差的影响较大,角度误差对机械手末端姿态误差的影响较大,移动误差相对于其他因素对机械手末端位姿误差的影响较小,因此在设计机械手时应该尽量减小机械手结构参数误差和角度误差;通过对机械手末端执行器进行误差补偿后,机械手末端执行器的定位精度满足了工作要求,这为后期注塑机械手的精度控制的研究奠定基础.
[1] 裴 崇.注塑机械手的结构设计与力学性能分析[D].广州: 广东工业大学,2015.
[2] 王颜辉.注塑机专用五轴伺服机械手的研究[D].太原:太原理工大学,2011.
[3] 关志杰.注塑机专用机械手的设计与虚拟样机仿真[D].西安:陕西科技大学,2013.
[4] 管 洋.基于注塑机的伺服机械手的研究[D].青岛:青岛科技大学,2013.
[5] 李敬宇,谢清源,李一前.五轴伺服注塑机械手[P].中国专利:CN201728805,2011-02-02.
[6] 潘开洪.注塑产品横走伺服取出机械手[P].中国专利:CN202640719U,2013-01-02.
[7] 施宏豫,胡正义,陈旭凯,等.一种用于注塑机中实现贴膜和产品取件的设备[P].中国专利:CN204209899U,2015-03-18.
[8] 曹三燕.机械手静态误差分析及动态误差初探[D].天津:河北工业大学,2013.
[9] 焦国太.机器人位姿误差的分析与综合[D].北京:北京工业大学,2002.
[10] 丁希仓,周乐来,周 军.机器人的空间位姿误差分析方法[J].北京航空航天大学学报,2009,35(2):241-245.
[11] 刘永青,袁祖强,戴加全,等.三关节机械臂运动精度的误差分析及补偿策略[J].机械设计,2014,31(3):29-33.
[12] 吴健荣,王立权,王才东,等.机器人精度设计的方法研究[J].哈尔滨工程大学学报,2010,31(10):1 367-1 372.
[13] 祝建礼.多自由度检测机器人控制系统开发与位姿误差补偿[D].杭州:浙江大学,2007.
[14] 候士杰.机器人结构参数辨识与位姿误差补偿研究[D].南京:南京航天航空大学,2012.
[15] 栾本言,孙首群,田科技.六自由度工业机器人位姿误差的补偿方法[J].信息科技,2015(1):191-194.
