模块化无人机组控制策略研究
2018-01-04王宏福
王宏福,韩 晶
(中北大学, 太原 030051)
【航空和航海工程】
模块化无人机组控制策略研究
王宏福,韩 晶
(中北大学, 太原 030051)
以两架模块旋翼机对接后为研究对象,提出其控制策略并进行了动力学方程和传递函数计算,建立了研究对象的SimMechanics模型、角速度与力的转换模型以及控制模型。对这三个模型封装连接,联合仿真,实现对高度的控制。
模块化;四旋翼;对接;运动学仿真
当前无人机得到了飞速的发展,利用无人机从事的工作也越来越多。由于工作难度系数的增加,工作半径的扩大,一架无人机已经很难满足要求了,通常需要多架无人机协同完成一项任务。目前关于无人机项目的研究关于路径规划的居多,模块化无人机组对接前后的控制研究并不多见,本文着重对两架模块旋翼机对接后的模型进行了动力学分析,得出了可靠的控制策略,并进行了对高度控制的仿真实验。对接方式如图1所示。
1 两架模块旋翼机的控制策略
每个分立的无人机都有一个IMU模块,用来检测本机的飞行姿态,在分离状态下,有一个主机和一个从机,每个飞机被各自的遥控控制,当要进行组合作业时,两无人机在空中进行组合锁死,其控制框图如图2。这时锁死机构会给两个无人机一个组合完成的信号,这时无人机的控制策略会更换成合体后的控制策略。
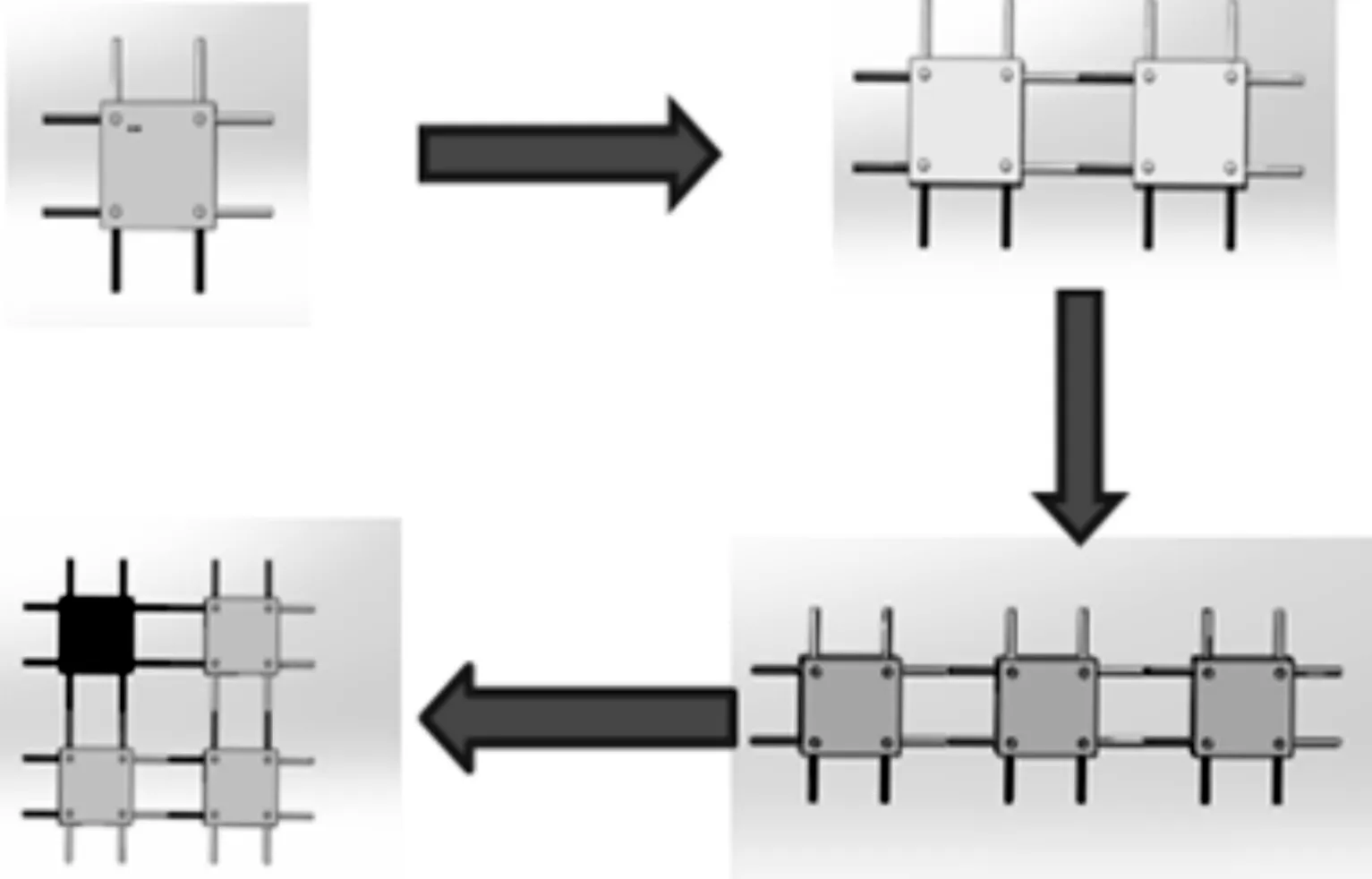
图1 模块化无人机组的对接方式
组合后的无人机的控制策略跟单个无人机其实是类似的,区别在于,单个无人机的控制是由本机上的嵌入式系统实现的,通过一个嵌入式系统控制一架无人机,而组合后的控制,主机和从机的姿态解算是分别由主机和从机上的嵌入式系统实现的,但是两个嵌入式系统采用同一套控制策略分别控制各自的无人机,从而实现组合后无人机的自稳。
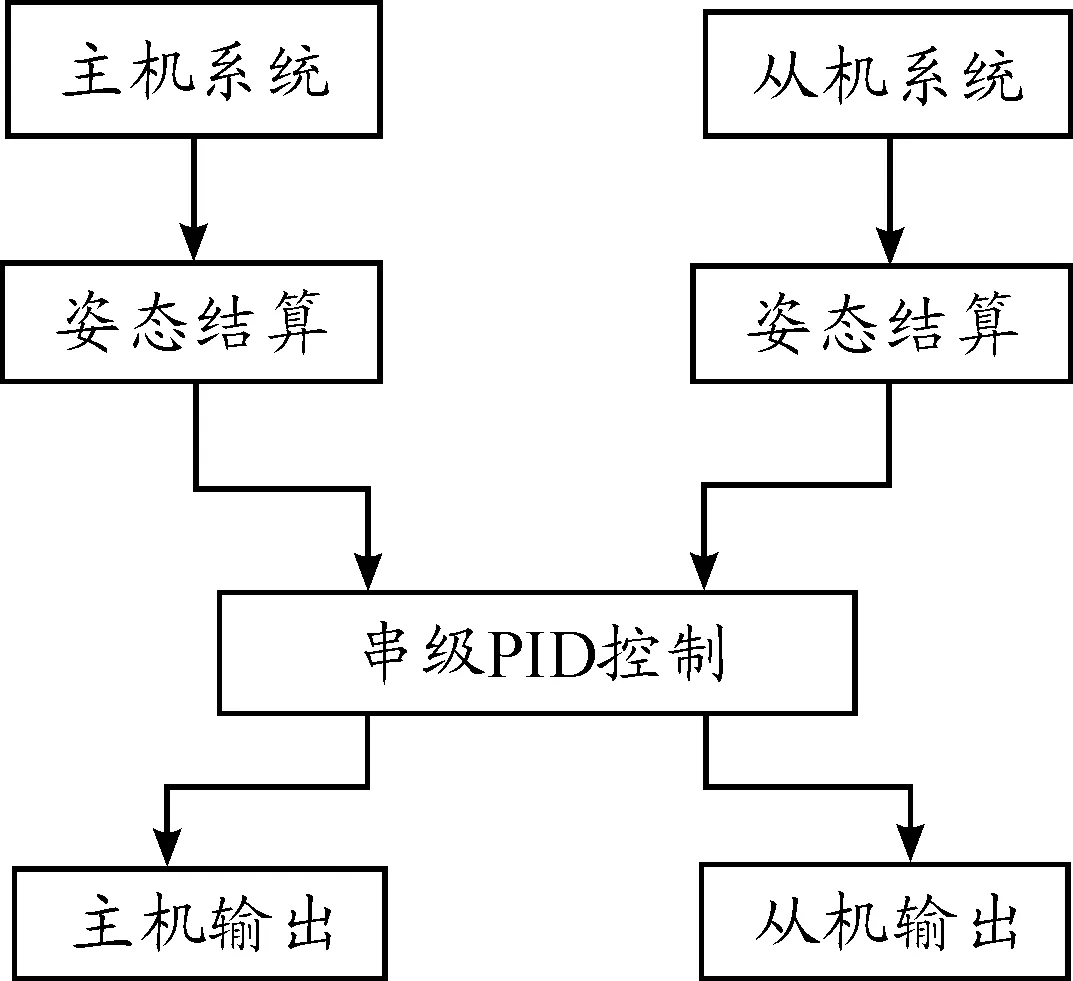
图2 两个模块旋翼机对接的控制框图
猜想的控制策略如下:
上升:F1=F2=F3=F4=F5=F6=F7=F8
M1=M3=M5=M7=-M2=-M4=-M6=-M8
俯仰:F1=F2=F5=F6≠F3=F4=F7=F8
M1=M5=-M2=-M6≠M3=M7=-M4=-M8
偏航:F2=F4=F6=F8≠F1=F3=F5=F7
M2=M4=M6=M8≠-M1=-M3=-M5=-M7
滚转:F1=F2=F3=F4≠F5=F6=F7=F8
M1=-M2=M3=-M4≠M5=-M6=M7=-M8
2 机体的动力学方程及传递函数
2.1 机体的动力学方程
地面坐标系如图3。设滚转角、俯仰角、偏航角分别为α、β、γ,图4表示机体坐标系。坐标原点位于机体质心。则可以求得变换矩阵R为:

作用在X轴上的转矩MX:
-F1·L-F2·3L-F3·3L-F4·L+F5·3L+
F6·L+F7·L+F8·3L
作用在Y轴上的转矩MY:
F1·L+F2·L-F3·L-F4·L+F5·L+
F6·L-F7·L-F8·L

作用在Z轴上的转矩MZ:
MZ=M1-M2+M3-M4+M5-M6+M7-M8

则根据牛顿-欧拉方程得到:
根据牛顿第二定律可得:
其中,Kx,Ky,Kz为空气阻力系数,低速时忽略不计。
根据以上计算最终得到动力学方程为:
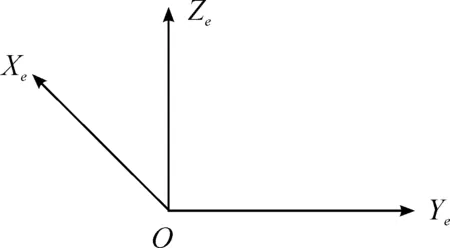
图3 地面坐标系
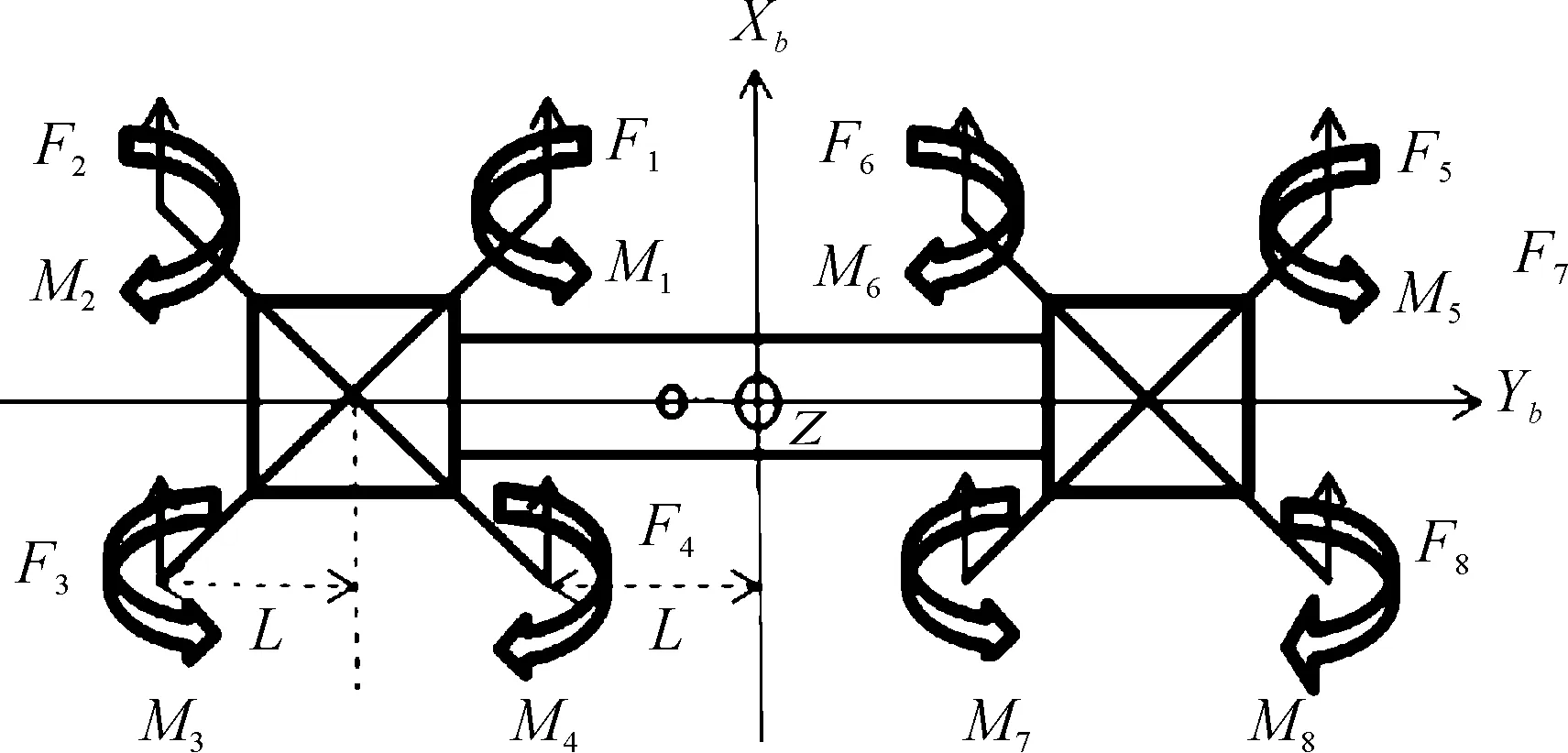
图4 两架模块机对接后的机体坐标系
2.2 准LPV设计方法求传递函数


2.3 参数计算
对接后旋翼机的总质量m=2·m■,其中m■为一架模块旋翼机的总质量。
m■=mΔ+4×M
其中mΔ为机架质量,M为单个电机的质量。

其中L■为一架模块旋翼机(正方形)的边长。
lx=40×M·L2+4×(m■-4×M)·L2
ly=8×M·L2
lz=48×M·L2+8×(m■-4×M)·L2
通过给定电机质量、机架质量及边长,结合以上计算方法,得到的参数见表1。

表1 计算得到的参数
整理以上所有计算结果,结论如下:系统输入:

系统输出:
系统传递函数G(S):
3 两个模块旋翼机对接后的运动学仿真
3.1 模型的构建
由于单个模块旋翼机(如图5)和两个模块旋翼机的对接(如图6)复杂的三维模型在导出SimMechanics模型时容易出错、卡死,所以必须对模型进行简化。两架旋翼机对接后的简化solidworks三维模型如图7。
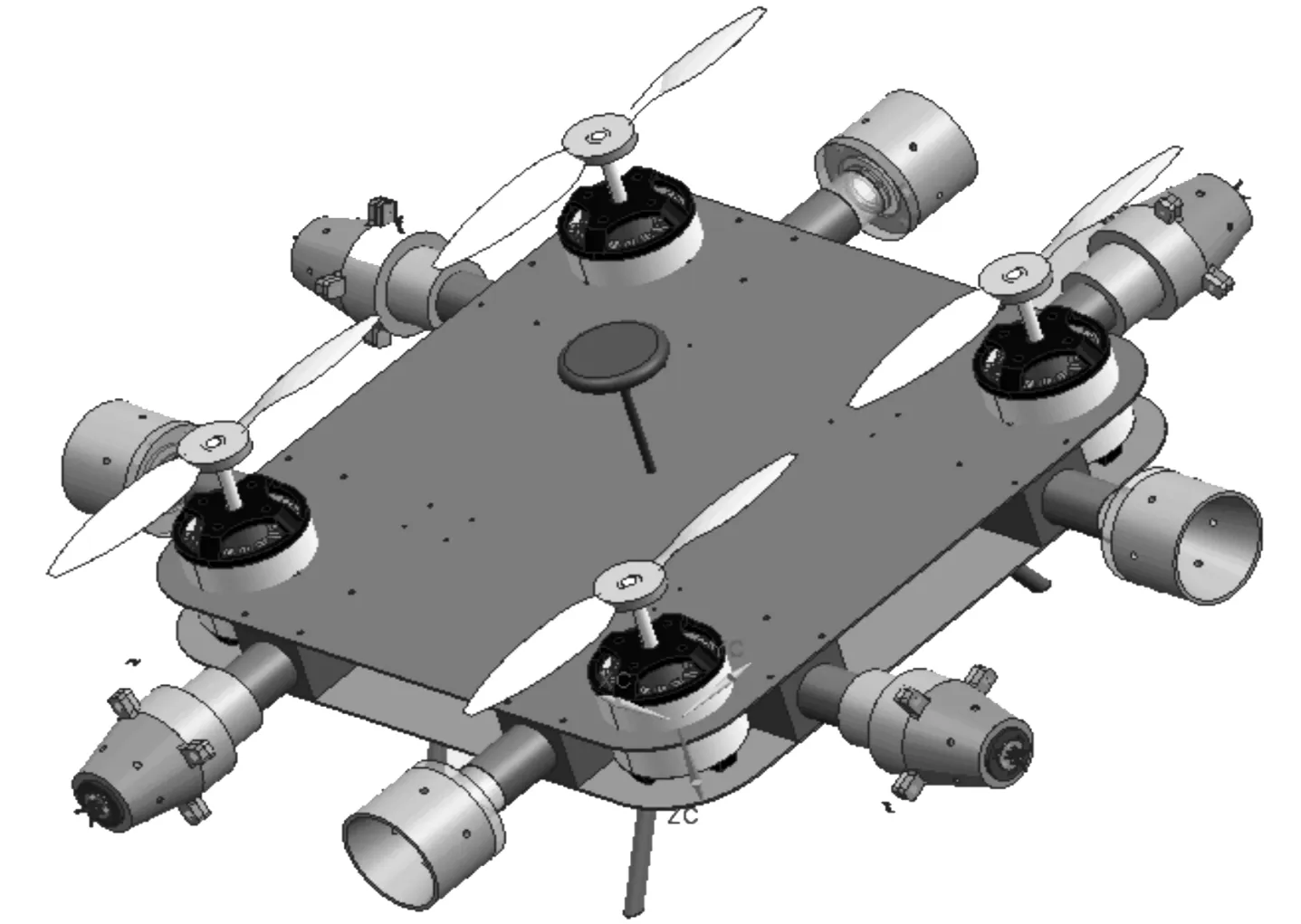
图5 单个模块旋翼机
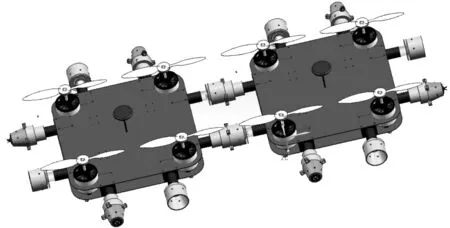
图6 两个模块旋翼机的对接

图7 整机的solidworks简化模型
将SolidWorks模型导入成SimMechanics模型,在每一个铰链处输入转矩T,则相应的输出角速度为w。角速度输出到下一模块转换成施加在铰链上力之后,再施加到每一个螺旋桨上,其示意框图如图8所示。
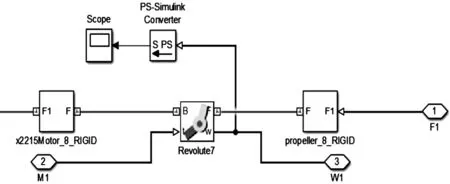
图8 电机与螺旋桨之间铰链的输入、输出
则整机的模型如图9。
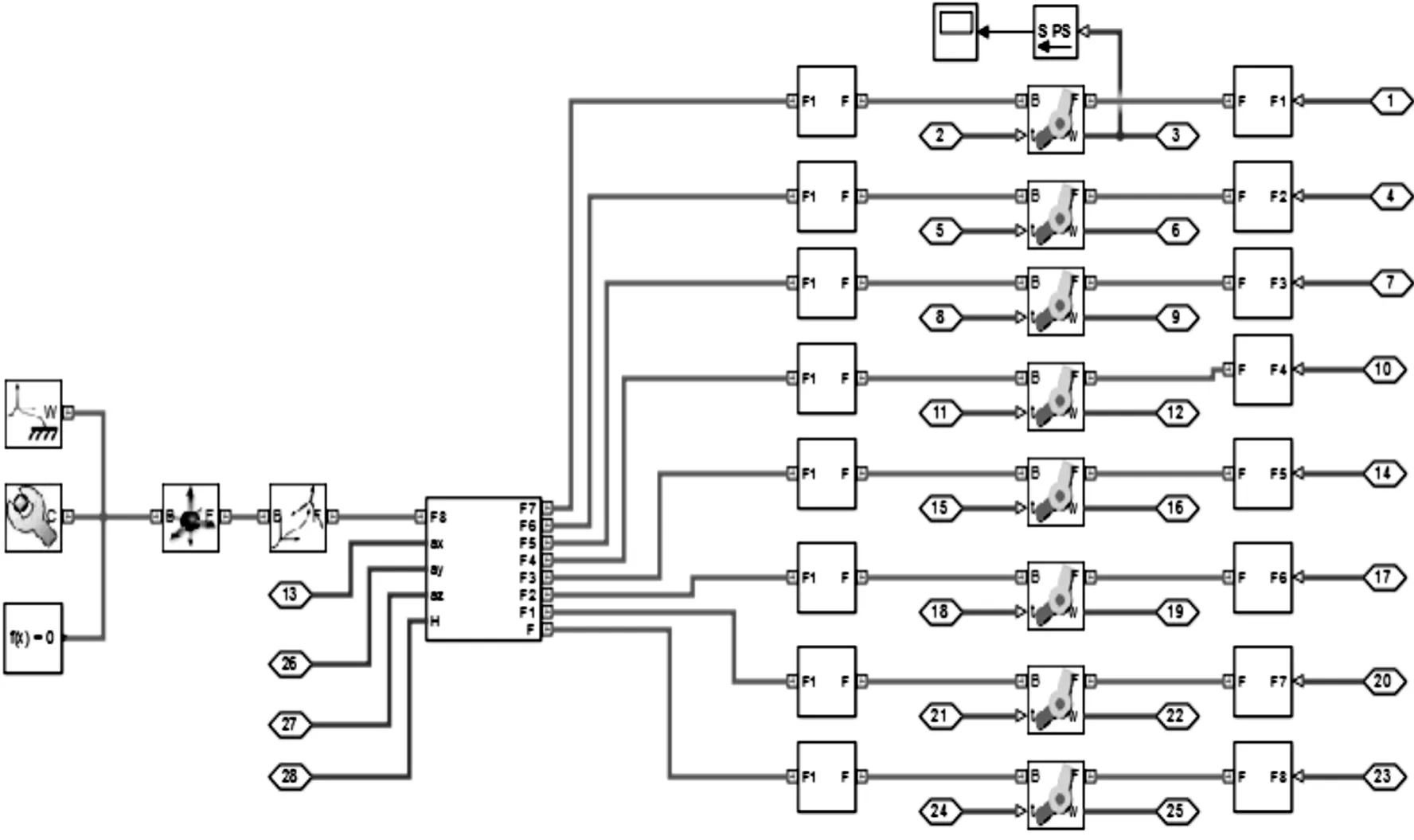
图9 整机的SimMechanics模型
角速度与力的转换根据公式F=Kt·ω2,Kt代表升力系数,ω代表螺旋桨转速。转换模型如图10所示。

图10 角速度与力的转换模块
将以上两个模型封装连接,如图11。
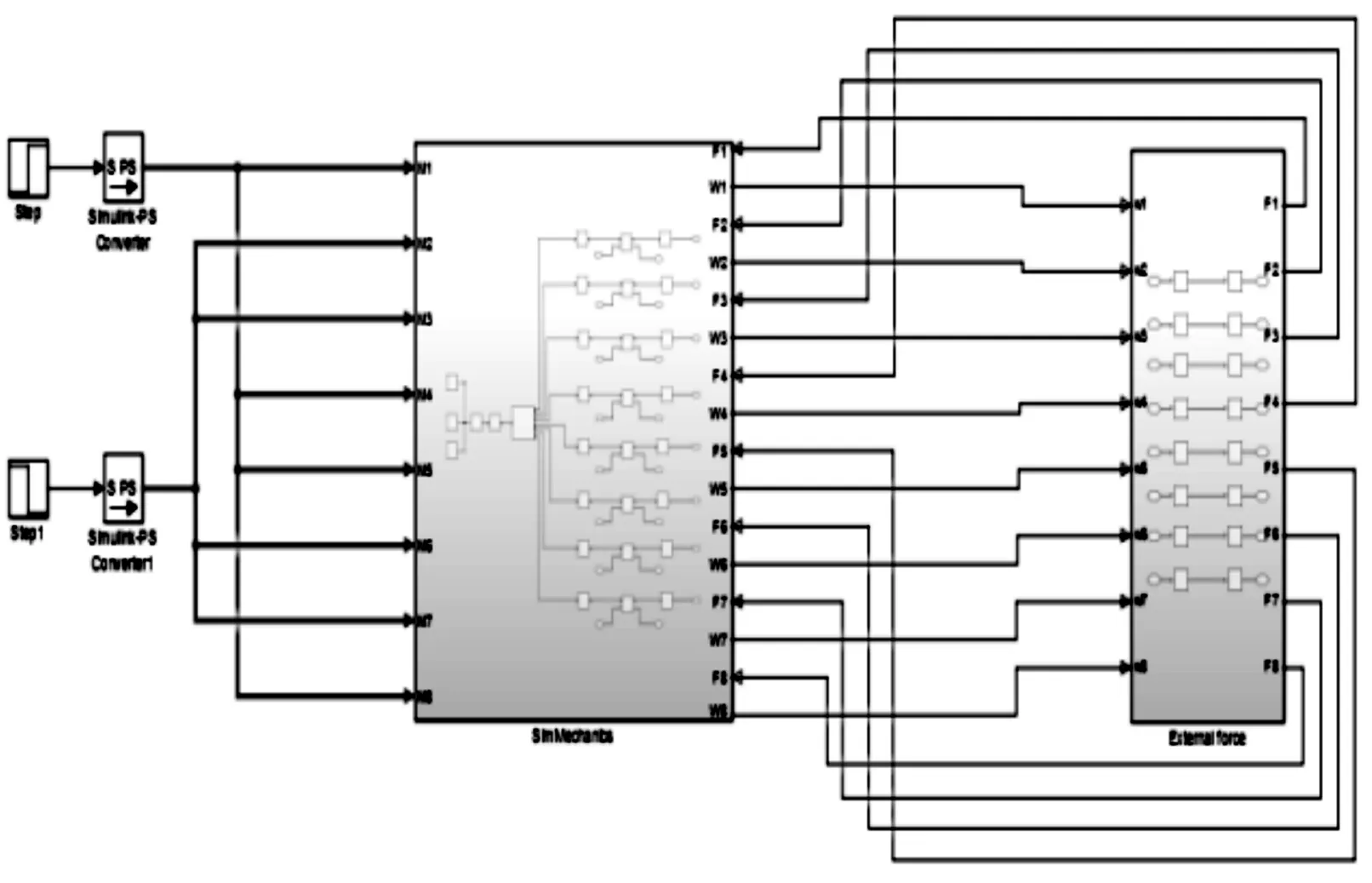
图11 整机模型与转换模型封装连接
W1~W8对应模型上的电机的位置如图12。
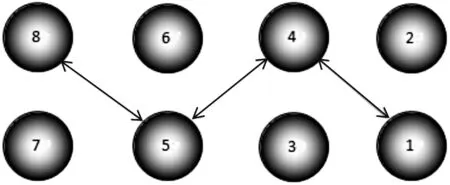
图12 电机在整机上的相对位置及标号
运行过程如图13。
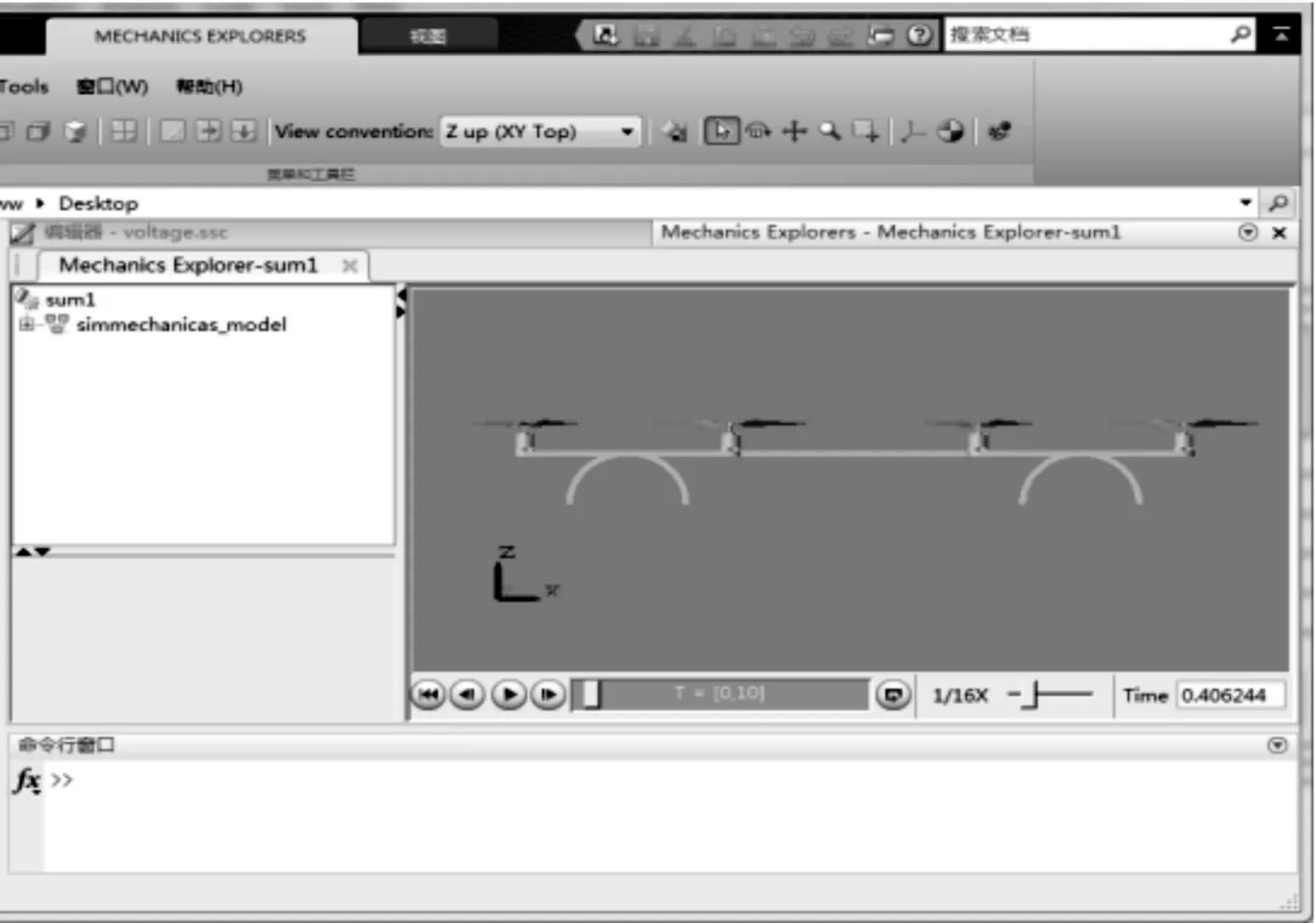
图13 整机的仿真运行过程
3.2 无控状态下无人机组的飞行状态
上升状态(如图14),其中:
1,4,5,8号电机转矩0.5
2,3,6,7号电机转矩-0.5
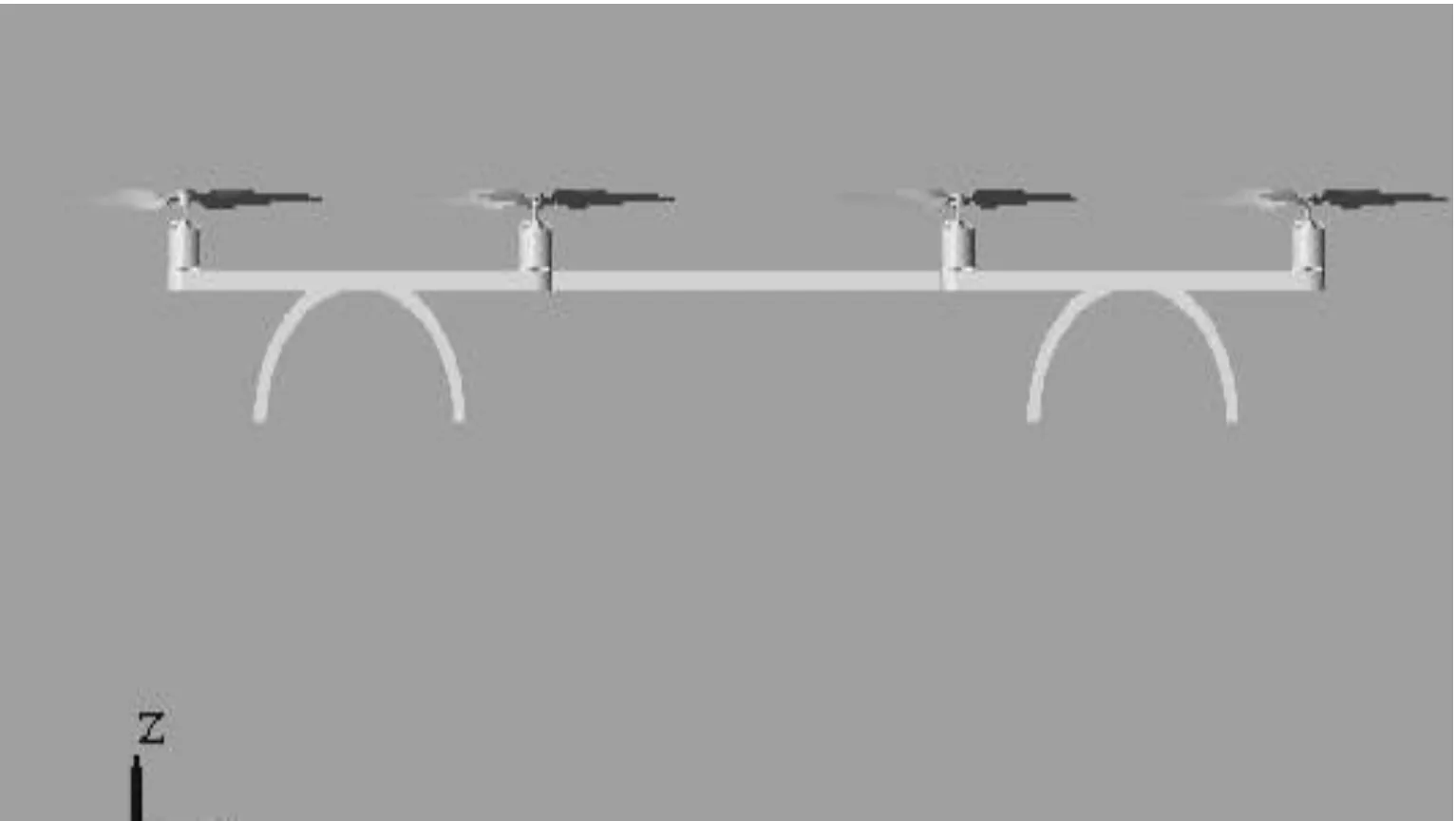
图14 整机的上升运动
滚转状态(如图15),其中:
1,4号电机转矩0.5
2,3号电机转矩-0.5
5,8号电机转矩0.4
6,7号电机转矩-0.4
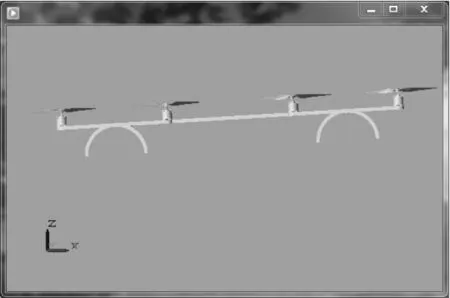
图15 整机的滚转运动
俯仰状态(如图16),其中:
1,5号电机转矩0.5
3,7号电机转矩-0.5
4,8号电机转矩0.4
2,6号电机转矩-0.4

图16 整机的俯仰运动
偏航状态(如图17),其中:
1,4,5,8号电机转矩0.5
2,3,6,7号电机转矩-0.4

图17 整机的偏航运动
说明电机如果按如上方法施加转矩,则两架模块机对接后可以正常完成上升、滚转、俯仰、偏航四种姿态。控制模型如图18。4.3定高控制下无人机组的飞行状态加上控制模型后,将整机模型的高度和沿机体坐标系沿x,y,z轴的加速度反馈出来便于控制,如图19所示。将控制模型与整机模型和转换模型封装连接之后,系统模型如图20。
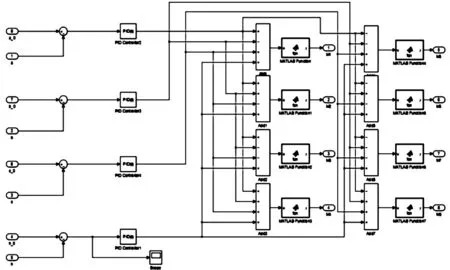
图18 对高度的控制模型
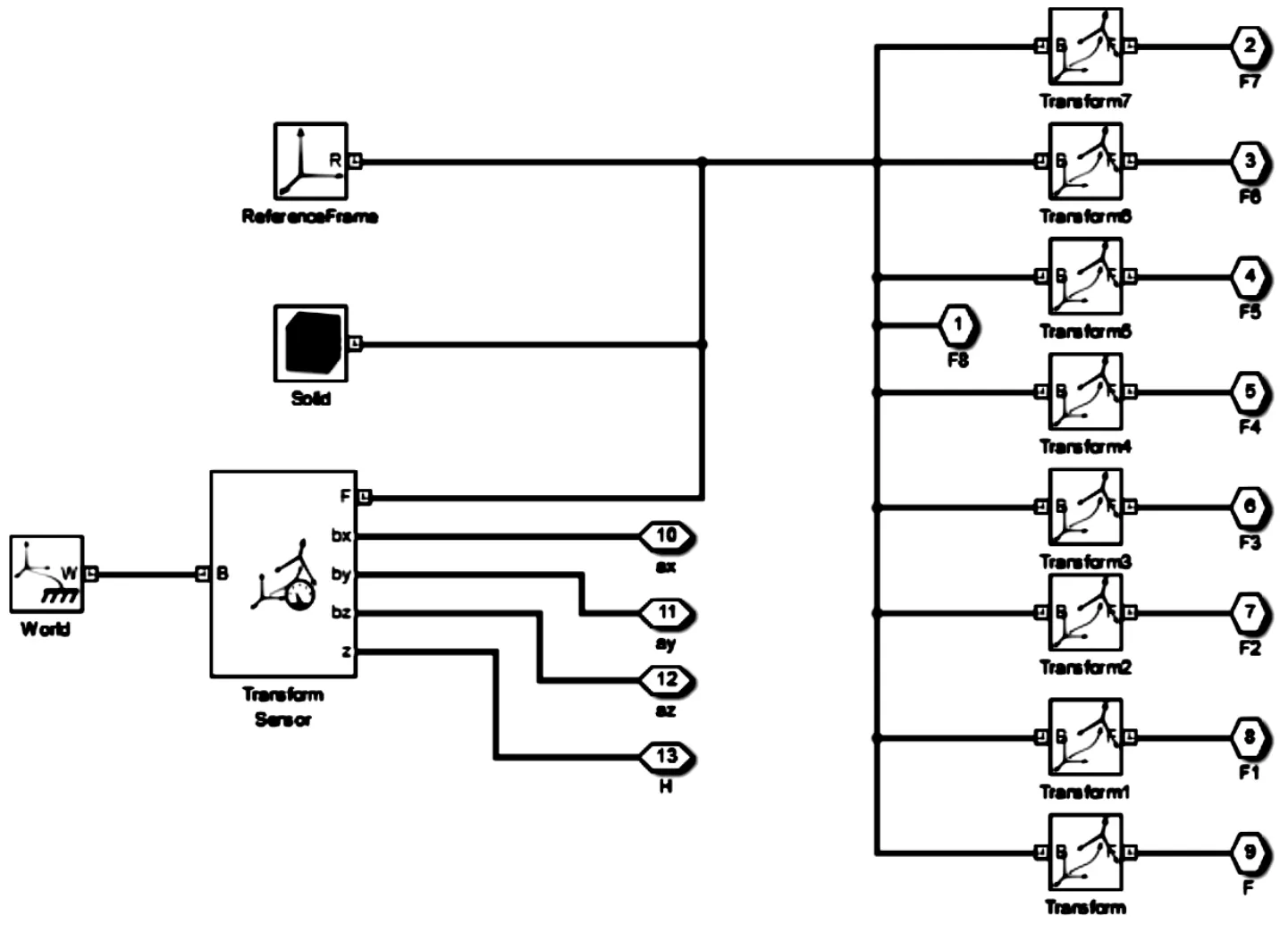
图19 机体高度和加速度的信息反馈
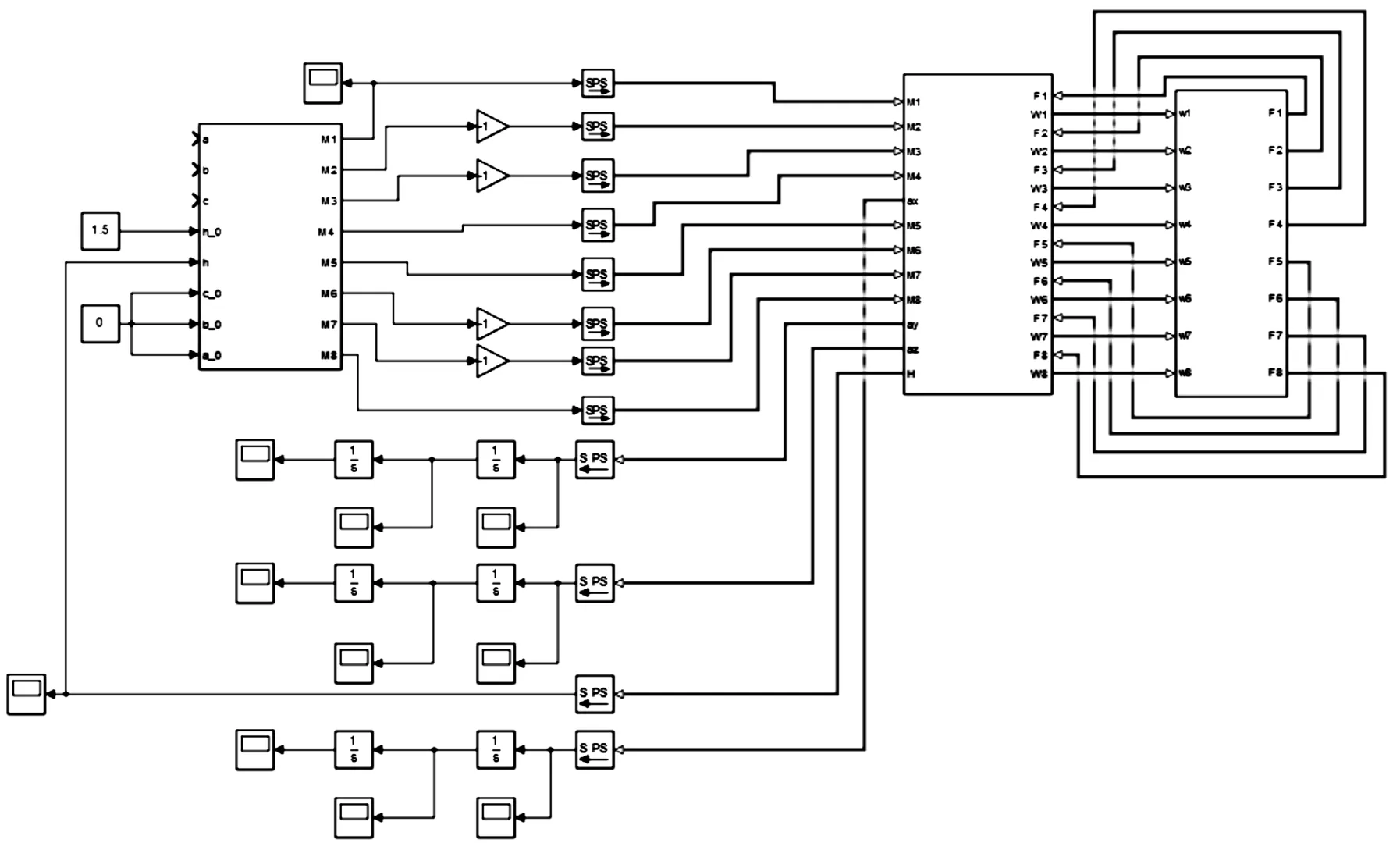
图20 系统的联合仿真模型
此模型中以高度调整为例,图21是运行过程中模型的悬停。

图21 系统运行状态
高度控制(在1.5 m高处悬停)响应曲线如图22。
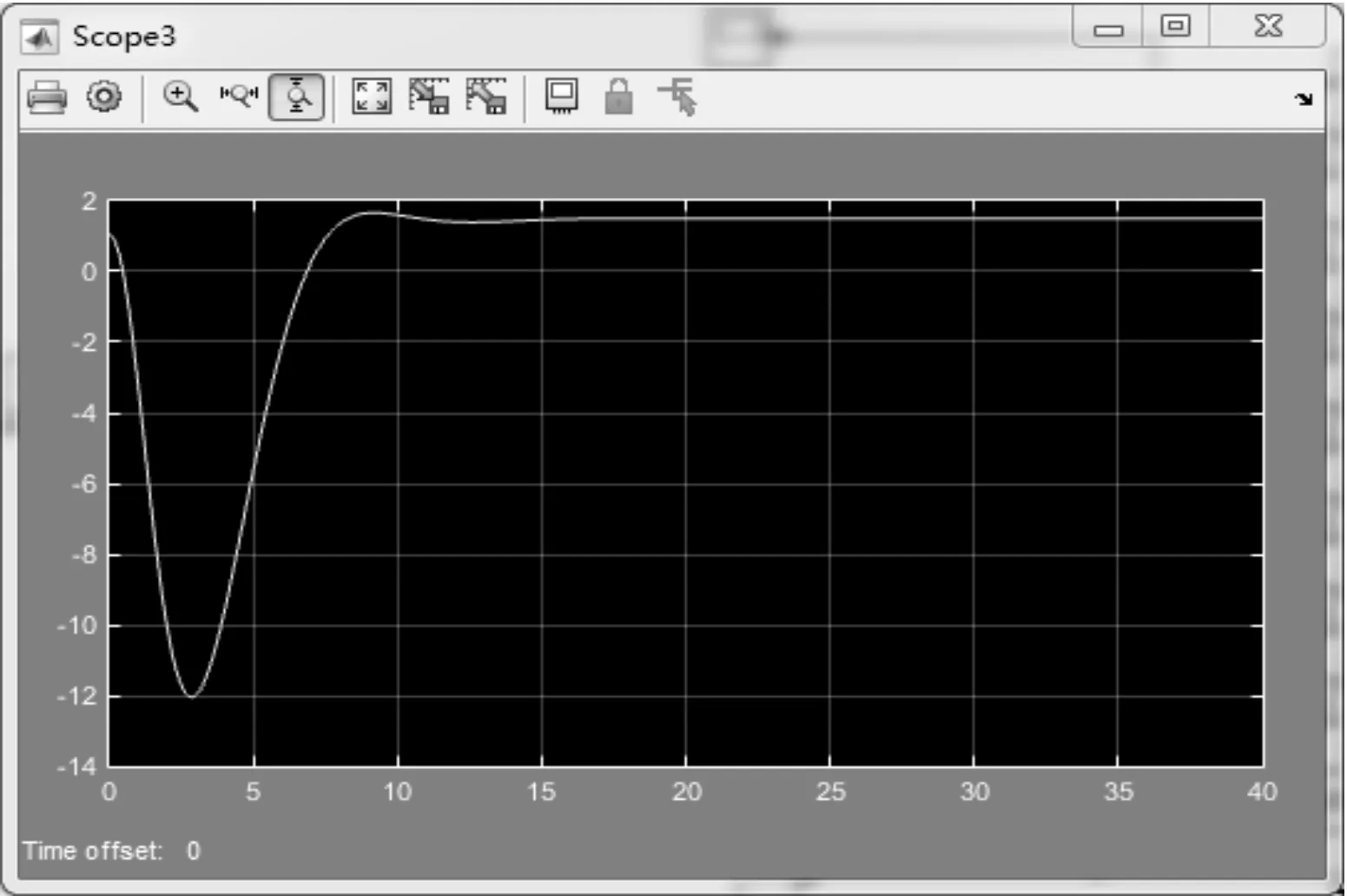
图22 机体高度控制响应曲线
分析说明:大约前3秒的高度降低是因为模型中没有“着地”模块,模型是在空中开始仿真,由于电机刚开始施加转矩时,螺旋桨的速度刚开始增加,其提供的升力不足以使飞行器悬停,所以在前几秒钟高度骤降,之后的响应曲线是正常的阶跃响应曲线。
4 结论
模块化无人机组控制策略研究为模块化无人机组的设计成型提供了一定的理论基础,按照如下控制策略,即:
上升:F1=F2=F3=F4=F5=F6=F7=F8
M1=M3=M5=M7=-M2=-M4=-M6=-M8
俯仰:F1=F2=F5=F6≠F3=F4=F7=F8
M1=M5=-M2=-M6≠M3=M7=-M4=-M8
偏航:F2=F4=F6=F8≠F1=F3=F5=F7
M2=M4=M6=M8≠-M1=-M3=-M5=-M7
滚转:F1=F2=F3=F4≠F5=F6=F7=F8
M1=-M2=M3=-M4≠M5=-M6=M7=-M8
两架模块机对接后可以正常完成上升、滚转、俯仰、偏航4种姿态。在高度控制下,可以顺利完成悬停。模块化无人机组对接过程的抗扰动控制、增加模块化无人机的控制数量为进一步的研究方向。
[1] KATSUHIKO OGATA.现代控制工程[M].4版.卢伯英,于海勋,译.北京:电子工业出版社,2003.
[2] 胡寿松.自动控制原理[M].6版.北京:科学出版社,2013.
[3] JOHN BAICHTAL.无人机DIY[M].姚军,译.北京:人民邮电出版社,2016.
[4] 濮良贵,纪名刚.机械设计[M].8版.北京:高等教育出版社,2009.
[5] 周高峰,赵则祥.MATLAB/Simulink机电动态系统仿真及工程应用[M].北京:北京航空航天大学出版社,2014.
[6] 李国勇,谢克明,杨丽娟.计算机仿真技术与CAD——基于MATLAB的控制系统[M].2版. 北京:电子工业出版社,2008.
[7] 于琰平.基于FlightGear的四旋翼无人机三维可视仿真系统研究[D].天津:天津大学,2010.
[8] 李俊,李运堂.四旋翼飞行器的动力学建模及PID控制[J].辽宁工程技术大学学报(自然科学版),.31(1).
[9] 段世华.四旋翼飞行器控制系统的设计和实现[D].成都:电子科技大学,2009.
[10] 魏丽文.四旋翼飞行器控制系统设计[D].哈尔滨:哈尔滨工业大学,2010.
[11] 徐大远,王英健.四轴飞行器的动力学建模和位置控制研究[J].电子科技,2015,28(1).
[12] 黄永斌,李齐.四轴飞行器仿真系统设计[J].软件设计,2012,12(2).
[13] 林鹏宏.四轴无人机多约束条件下的跟踪控制和轨迹规划方法研究[D].哈尔滨:哈尔滨工业大学,2016.
[14] 杨树川,邵金龙.基于Solidworks & SimMechanics的机构运动分析与仿真[J].河北工业科技,2011,28(4).
[15] 江杰,冯旭光.四旋翼无人机仿真控制系统设计[J].电光与控制,2015,22(2).
ResearchonControlStrategyofModularUnmannedAerialVehicle
WANG Hongfu,HAN Jin
(The North University of China, Taiyuan 030051, China)
After the docking of two modular rotorcraft, the control strategy was proposed and the dynamic equations and transfer functions were calculated. The SimMechanics model, the conversion model of angular velocity and force and the control model were established. After the three model packaging connection, co-simulation, had achieved a high degree of control pair.
modularization; four rotor; docking; kinematics simulation
2017-10-15;
2017-11-02
王宏福(1992—),男,硕士,主要从事智能控制技术研究。
韩晶(1980—),男,博士,副教授,主要从事智能控制技术研究。
10.11809/scbgxb2017.12.050
本文引用格式:王宏福,韩晶.模块化无人机组控制策略研究[J].兵器装备工程学报,2017(12):227-232.
formatWANG Hongfu,HAN Jin.Research on Control Strategy of Modular Unmanned Aerial Vehicle [J].Journal of Ordnance Equipment Engineering,2017(12):227-232.
TJ8;V1
A
2096-2304(2017)12-0227-06
(责任编辑杨继森)
