对未知复杂体制雷达信号融合处理算法*
2018-01-02赵汝鹏田润澜王春雨赵皓
赵汝鹏,田润澜,王春雨,赵皓
(1.空军航空大学 信息对抗系,吉林 长春 130022;2.中国人民解放军95215部队,广东 汕头 515000)
0 引言
信号处理是电子情报系统中重要技术,是实现雷达目标识别的重要基础。随着雷达技术的迅猛发展和新体制雷达的运用,雷达信号的复杂度大幅度提高。且对应于不同的工作模式,雷达信号参数又有不同的组合,即使是在同一种工作模式,由于各种噪声的影响,信号参数也存在一定的变化范围[1],使传统的依靠单参数或不同参数逐级进行处理的效果不佳。
目前联合多参数处理的算法主要有灰关联分析法、模糊识别法和证据理论。灰关联分析方法通过比较待处理信号与参考信号的灰度值进行信号处理,算法简单计算量小,但准确率不高,后续对其输入进行了改进,准确率提高到91%,但参数类型仅限制于区间型[2-4];模糊识别算法主要以模糊隶属度代替相似性测度作为依据进行信号的处理,为雷达信号处理提供一种认知具有不确定性事件的数学方法。但在实际运用中,对多个关于同一目标的观测样本的处理结果可能不一致甚至是矛盾的[5-6];且2种算法仅对各雷达信号进行单独处理,没有对来自不同侦察设备和不同时间积累的信号进行融合[7]。证据理论是通过融合各证据的各方面信息来解决不完整、不精确信息带来的影响,目前大量用于雷达信号融合处理,准确率高,但算法复杂,存在输入多与算法复杂度高的矛盾[8-9]。目前对雷达信号处理全都依赖于模板库进行的,缺少对无模板库的新型雷达信号融合处理研究,在大量信号数据的情况下,其处理结果稳定性差。
针对上述问题本文提出了基于证据理论的复杂体制雷达信号多层融合处理算法。算法首先根据待处理雷达信号数据进行建库;构建既可体现参数间相似程度,还可描述多值参数匹配程度和对相同目标不同信号样式进行标记的相似度模型,提取相似度矩阵;用证据理论对各雷达信号进行参数级融合,进行关联判决分成多个信号集;再用证据理论融合各信号集中的信号信息进行验证;文中还对相同目标的判决规则进行了推导。仿真表明该算法可有效地对缺少数据库的各复杂体制雷达信号的融合处理,实现归类合并,使雷达信号更加丰富完整,为进一步的信号识别提供稳定的信号数据。
1 雷达信号间参数的处理
在处理未知雷达目标时,因缺乏先验知识,对于雷达参数的具体类型变化主要概括为单值型、多值型和区间型[10],可避开因设备性能和噪声因素造成参数类型判断错误给算法带来的影响,能更简单有效的计算各目标的参数相似度[11]。下面对不同类型相似度模型讨论:
(1) 单值型参数的相似度
当参考参数为A值,待测参数为B值时,令Δ=A-B,则相似度定义为
(1)
式中:r为测量参数的容差值。
(2) 多值型参数的相似度
模板参数由小到大依次为(A1,…,Ai,…,An),待处理参数由小至大依次为(B1,…,Bi,…,Bm),而实际中由于各种因素影响出现参数存在缺漏的情况,导致m≠n,因此对于多值型相似度分以下几种情况讨论
1) 当m=n时,相似度定义为

(2)
(3)
对于相同雷达目标不同信号样式,其PRI组值不在容差内,但有严格的倍数关系,如表1所示,雷达载频和脉宽相同,但脉冲重复周期按式(2)不匹配,但信号样式1是样式2的2.4倍。面对这种情况对d和d(A,B)进行相应的修改为
令τ≈A1/B1≈…≈An/Bn;

(4)
(5)
此时对相似度加11进行标志,这样既可对可能是相同目标不同信号样式进行标记,又与下面对多参数匹配程度区分开。
δ=+11. (6)
2) 当n≠m时,确定相似度的步骤如下:
a) 确定所对应的匹配点。由于参数值缺损位置不确定,需对参数组A与B进行粗匹配,设定阈值ρ,当Bi-Aj<ρ时,则匹配成功。
b) 为方便对参数相似度计算计算,将匹配成功的参数组由小到大进行排序为(A1,A2,…,An′)和(B1,B2,…,Bn′),n′≥2。
c) (A1,A2,…,An′)和(B1,B2,…,Bn′)之间相似度的计算和情况和1)求法相同。
d) 进行匹配程度标记。匹配程度系数为σ=n′/max(n,m),则δ′=δ+fix(10σ),所获得的相似度即体现了参数匹配程度,又准确反应出参数组间的相似程度,便于后面算法使用。
(3) 区间型参数的相似度
当模板参数为区间(A1,An),待处理参数为区间(B1,Bm)时,相似度定义如下:
δ=

(7)
式中:L为区间的长度;(B1,Bm)∩(A1,An)为2个区间的交集。
(4) 相似度模型选择原则
在实际处理中,待处理雷达信号参数的类型与模板雷达难以达成一致,从而造成相似度模型的选择出现问题,因此对于参数类型不一致的相似度模型选择原则如图1所示。

图1 参数类型不一致的相似度模型选择Fig.1 Similarities model selection for inconsistent parameter types
2 D-S证据理论
D-S证据理论是融合处理不完善信息的有效工具,它用识别框架U表示所识别的目标集,并定义U上的基本概率赋值函数(BPAF)m:→[0,1],满足
(8)
式中:命题A为U的非空子集,称为焦元;m(A)反映了对A的信度大小。
m1,m2,…,mn为n个独立证据推导出的对识别框架U的BPAF,则利用D-S组合规则,可以计算这n个证据共同作用下的BPAF[12-13]
(9)
用证据理论组合证据后如何进行决策是与应用密切相关的问题。由于雷达信号缺乏先验条件的特点,以待处理雷达信号进行建库,同时作为证据进行融合获得的最终信任值,将信任值相等或相近的判为同一目标,设定阈值ε,满足
m(Ci)-m(Cj)<ε,
(10)
则目标Ci和Cj判为同一雷达目标信号。利用证据理论对待处理的信号数据的融合处理理论上是可行的,可以充分利用来自各方的信息实现融合,降低了单个证据信息不完整或偶然性带来的影响,同时又解决了D-S证据理论只能融合多个证据来达到对目标的识别处理却不能分选出不相关的证据[14]。
3 算法描述
本文提出的算法整体流程如图2所示,具体的算法步骤如下:
(1) 建立模板库。以待处理雷达目标信号为基础建立模板库,用数字描述参数类型,其中数字1表示参数固定,数字2表示参数多值,数字3表示参数区间类型。
(2) 根据参数间的类型选择相应的相似度模型,计算相似度矩阵。
(3) 对相似度进行优化处理。根据相似度筛选出相同目标不同样式的信号参数进行标记;根据多值类型参数匹配程度进行相似度的调整,使更加贴近实际信号的描述。优化规则如表2所示。
(4) 利用D-S证据理论对各雷达目标参数相似度进行融合,得出各个证据融合全部参数对目标框架的信任值,进行判决归类。设置ε,若第i列信号相似度满足:
(11)
式中:sij为第i个信号对应于第j个目标的相似度,则j和k为同一目标;同理,求得第l列的sli与slm。若
(i,j)∩(i,k)∩(l,i)∩(l,m)≠∅,
(12)
则将目标i,j,k,l,m归为同一等价集。
(5) 利用D-S证据分别对步骤(4)获得的各等价集进行多信号融合验证,验证准则同理于式(11),由于此层是在信号级的融合处理,最后处理结果是以融合各信号作为基础的,降低了信号由于偶然性或不确定性给处理带来的错误影响,将属于同一目标的信号包括相同信号不同样式进行合并,对参数进行补充,使信号完整性得到进一步提高。
4 仿真实验
对电子对抗侦察设备侦收到的未知复杂体制雷达信号的融合处理结果,将直接影响进一步识别。本次仿真的实验数据如表3所示,各个目标信号主要用载频(RF),重复周期(PRI)和脉宽(PW)进行描述,且各参数容差值分别为15 MHz,0.3 μs,3 μs,测量误差为5 MHz,0.1 μs,1 μs。且参数类型包括了单值型,多值型和区间型,同时设置了参数相近、交叉和相同信号不同样式等情况。
根据表3建立数据库,根据参数类型选择相应的相似度模型,计算各雷达信号间的相似度,以PRI的相似度为例。该相似度模型的构建可以很好的反映出参数间的相似程度,又可以反映多值参数间的匹配程度,对于同一目标不同信号样式也能清楚表达,如s27=11.79,信号参数间明显为严格的2.24倍数关系。
根据步骤(3)对相似度进行优化处理,然后根据步骤(4)对各证据的参数相似度进行融合,得出每个信号相对于目标框架的信任值如表4。由表可看出利用D-S证据理论可很好融合各参数相似度获得对目标的信任值。且对于相同目标,其信任值也基本相同,信号1对于目标4和目标5都为0.19,仿真结果符合理论判决规则。
设置阈值ε=0.1,根据式(11)和(12)对各列进行判决和归类,把符合阈值内的目标提取出来。明显可以看出可将雷达信号大体分开,但还是存在信号出现重复现象,如信号2,同时出现在集合2和集合3中。这是由于该步骤是在信号参数级融合处理的,只能区分出待处理的每个独立信号与目标信号的相似程度,处理结果受信号数据质量影响大,对于带有偶然性和不确定性的数据处理结果极易出错。因此下一步对信号集的各信号进行融合,消除信号数据偶然性和不确定性带来的影响。
根据步骤(5)对各信号集合进行融合验证,融合结果如表5。对于相同信号,经融合后所得的信任值出现不同,但是在0.1的范围波动。这是因为受侦察环境和设备的影响,即使对于同一目标信号,其不同设备获得的信号参数精度和准确性不同造成的,但符合理论判决规则[15]。
通过多信号融合可充分利用各信号数据对步骤(4)所得信号集进行验证,将信号充分关联起来,共同致力于目标框架的判决。将因偶然情况和噪声影响出现错误归类的信号剔除,实现多类型参数复杂体制雷达信号的处理,最后将属于同一目标的信号进行合并,使他们更加丰富完整。如通过多信号融合信任值将目标2正确地从信号集3中剔除,并归为信号集2,结果如表6。
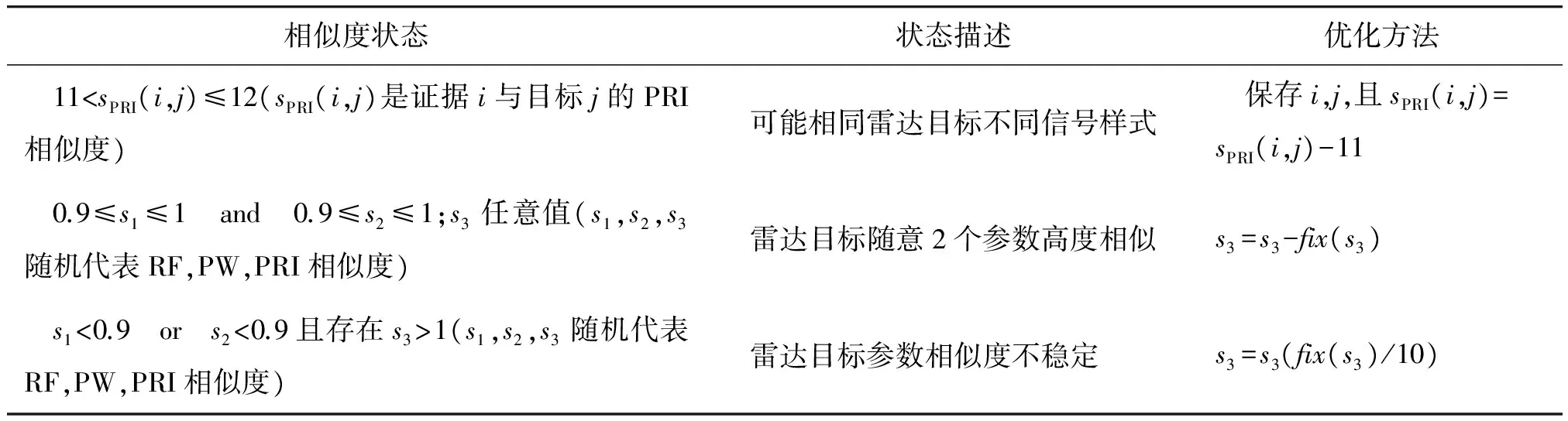
表2 相似度优化Table 2 Similarity optimization

图2 算法流程图Fig.2 Algorithm flow

信号RF/HzPW/μsPRI/μs16615,6620,678045,49,68.8,62.5,86.420.5,23.126606,6653,679237.8,28.8,48.7,55.72735321,567835,40,45,5020,2746615,6620,678045,68.8,62.520.9,23.356607.3~6787.244,49,68.8,62.520.7,23.366607,6658,680137.8,28.8,86.427.276606,6658,679864.7,86.6,103.5,125.3227.48532135,40,4520,2796601.8~6778.737.8,28.8,48.7,55.727.7106607~6797.244,49,68.8,86.420.6,23.211567835,40,4520,27
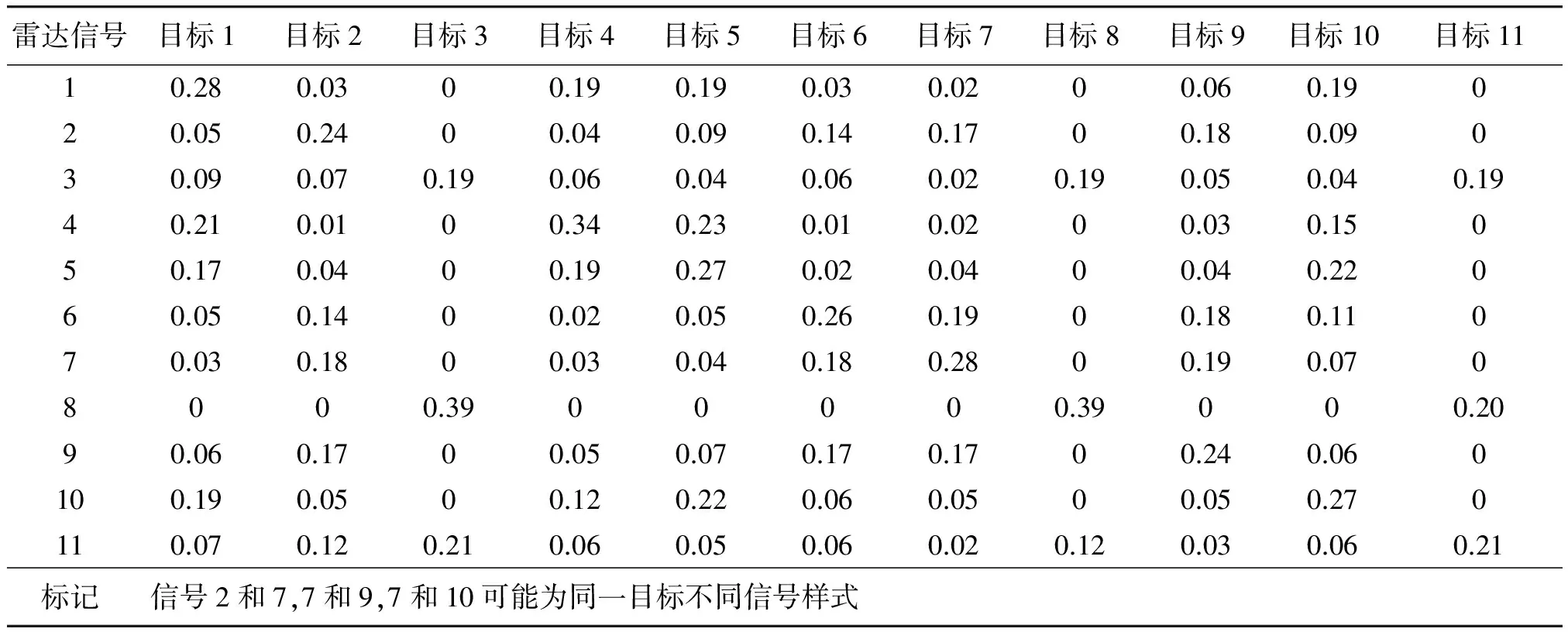
表4 融合各参数对目标框架的信任值Table 4 Trust values of each parameter relative to the target framework
算法的性能分析考虑到对雷达信号融合处理算法的目的,定义融合处理的有效率参数对算法的性能进行评估,有效率参数定义如下:
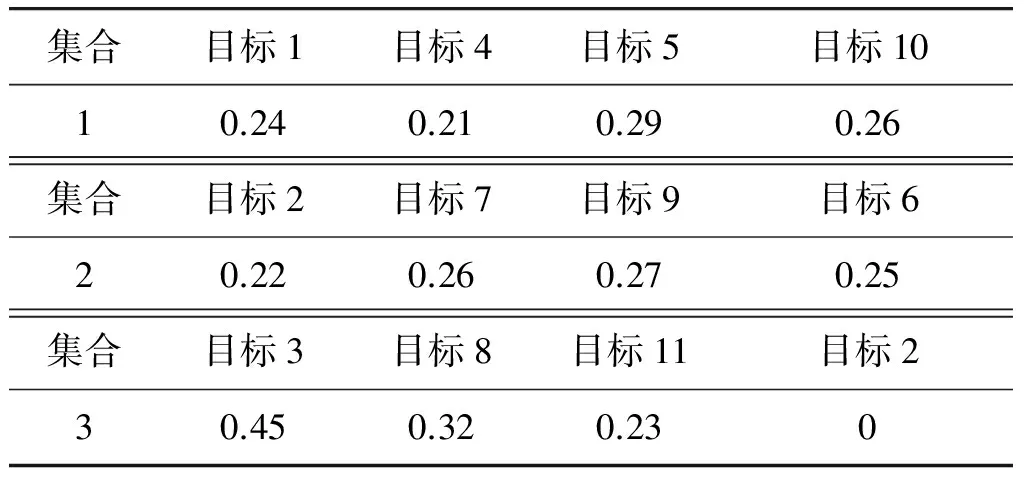
表5 多信号融合信任值Table 5 Trust value of multi signal fusion

(13)
式中:N为参与融合处理的总雷达信号数量;N1为在算法在处理中所获得的正确结果的数量。
处理雷达信号数量对有效率的影响。选取50个雷达目标信号,每个目标信号分别选取2,5,8,11,14,17,20,23,26个信号样本构成9个信号处理数据集。用该算法、模糊识别算法和区间灰关联算法分别对各数据集进行融合处理,并进行统计。如图3所示,在样本个数较小时,本算法处理的有效率比其他2种算法低约0.25,这是因为区间灰关联算法和模糊识别算法是对雷达信号进行单独的处理,因此在样本数量较少的情况下,其处理有效率则会更高;但随着随着每个信号选取的样本个数的增加,该算法的处理有效率也增加,最终趋于平缓,在0.93左右波动。进一步验证了该算法充分融合各信号信息可实现对未知信号的有效处理,且在大样本数据下还能保持稳定的有效率。而其他2种算法对于信号的处理仅仅局限于单个独立信号与目标框架的比较,而没有将信号融合起来,效率和处理时间。随机更换实验数据,重复仿真100次,计算处理有效率和处理时间的均值,结果如图3和图4。
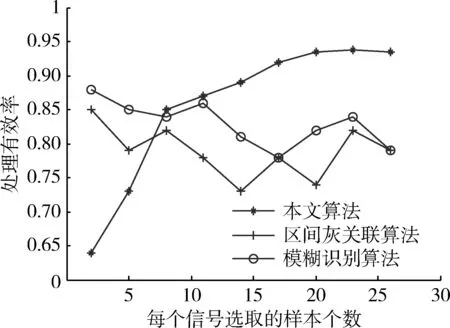
图3 有效率随处理个数的变化Fig.3 Efficiency change along with the quantity
随着每个信号选取样本个数的增加,其有效率没有增加,反而随着总雷达信号个数的增加而下降,且波动性大。
如图4所示,本算法消耗时间最多,这是因为算法采用了D-S证据理论,其复杂度均比其他2种算法高。但因该算法采用了多层次处理,先对信号各参数进行融合判决,然后再根据判决结果融合多信号进行验证,有效解决证据理论呈指数式增长的计算复杂度,即多输入与算法复杂度高的矛盾,因此所消耗的时间与其他2种方法在样本数为100时,几乎相等,在样本数高达1 300时,该算法所消耗时间和灰关联算法只差27.54%,和模糊识别算法只差37.71%,差距不大。

图4 总雷达信号数量与时间的关系Fig.4 Relations between total number of radar signals and time

雷达RF/HzPW/μsPRI/μs雷达信号16607~669745,49,68.8,62.5,86.420.7,23.21,4,5,1026601.8~6778.728.8,37.2,48.7,55.7/64.7,86.6,103.5,125.3227.42,6,7,935321,567835,40,45,5020,273,8,11
5 结束语
基于相似度的D-S证据理论算法可有效的对未知雷达信号进行融合处理。该算法基于待处理信号数据进行实时建库,并获取各参数相似度矩阵,然后运用D-S证据理论依次进行多参数和多信号融合处理。通过仿真分析,该算法对缺乏模板库的雷达信号融合处理有效率高,且在样本个数很大时还能保持稳定的处理有效率,消耗时间少,融合处理结果使雷达信号更加丰富完整,为进一步信号识别打下基础。
[1] 李辉,郑坤,金纬东,等.基于多层次建模的机载相控阵雷达工作模式识别[J].电子信息对抗技术,2016,31(4):1-5.
LI Hui,ZHENG Kun,JIN Wei-dong,et al.Working Mode Identification of Airborne Phased-Array Radar Based on Multi-Level Modeling[J]. Electronic Information Warfare Technology,2016,31(4):1-5.
[2] 傅成彬,张靖,计文平,等.灰色关联算法在多传感器辐射源识别系统的应用研究[J].中国电子科学研究院学报,2015,10(6):602-606.
FU Cheng-bin,ZHANG Jing,JI Wen-ping,et al.Research on the Application of Gray Correlation Theory on Multi-Sensor Radiation Recognition System[J].Journal of CAEIT,2015,10(6):602-606.
[3] 刘凯,王杰贵.基于神经网络的未知雷达辐射源智能识别技术[J].电子信息对抗技术,2013,28(6):18-22.
LIU Kai,WANG Jie-gui.A New Method Based on Interval Grey Association for Radar Emitter Recognition[J].Fire Control & Command Control,2013,28(6):18-22.
[4] 吴振强,常硕,张国毅.基于信号特征综合处理的雷达辐射源识别[J].科学技术与工程,2015,30(4):21-24.
WU Zhen-qiang,CHANG shuo, ZHANG Guo-yi.The Cloud Model and the Improved Grey Relational Algortthm Applied in Radar Emiter Recognition[J].Electronic Information Warfare Technology,2015,30(4):21-24.
[5] 丁锋,姜秋喜.多传感器模糊D-S理论辐射源识别[J].电光与控制,2008,15(4):34-38.
DING Feng,JIANG Qiu-xi.Emitter Recognition of Multi-Sensor Data on Fuzzy D-S Evidence Theory[J].Electronics Optics & Control,2008,15(4):34-38.
[6] LI Nan,QU Chang-wen,SU Feng,et al.Improved Radar Emitter Fuzzy Identification Algorithm[J].Journal of University of Electronic Science and Technology of China,2010,39(2):182-185.
[7] 王杰贵,罗景青,尹成友.多传感器信息融合机载辐射源识别[J].信号处理,2002,18(1):12-15.
WANG Jie-gui,LUO Jing-qing,YIN Cheng-you.Multisensor Data Fusion for Airborne Emitter Identification[J].Signal Processing,2002,18(1):12-15.
[8] 王付明,郭昕阳,黄金,等.基于D-S证据理论的多传感器雷达辐射源识别模型[J].现代防御技术,2012,38(1):61-63.
WANG Fu-ming,GUO Xin-yang,HUANG Jin.Recognition Model for Radar Emitter Identification with MultiSensor Based on D-S Evidence Theory[J].Modern Defence Technology,2012,38(1):61-63.
[9] Mohamed EI Yazid Boudaren,Emmanuel Monfrini,Wojciech Pieczynski,et al.Dempster-Shafer Fusion of Multisensor Signals in Nonstationary Markovian Context[J].EURASIP Journal on Advances in Signal Processing,2012(134):2-13.
[10] 刘海军,柳征,姜文丽,等.基于联合参数建模的雷达辐射源识别方法[J].宇航学报,2011,32(1):142-149.
LIU Hai-jun,LIU Zheng,JIANG Wen-li.A Joint-Parameter Based Radar Emitter Identification Method[J].Journal of Astronautics,2011,32(1):142-149.
[11] 夏智权,杨熔,景永奇.基于关联度的多目标同一性识别[J].现代防御技术,2015,43(2):142-146.
XIA Zhi-quan,YANGI Rong,JING Yong-qi.Multi-Sensor and Multi-Target Identity Recognition Based on Correlation Degree[J].Modern Defence Technology,2015,43(2):142-146.
[12] SU X Y,SANKARAN M,XU P D,et al.Handling of Dependence in Dempster-Shafer Theory[J].International Journal of Intelligent Systems,2015,30(4):441-467.
[13] 董杰,蔡群,丁锋,等.基于权值改进D-S理论的对空目标识别融合[J].现代防御技术,2016,44(2):185-189.
DONG Jie,CAI Qun,DING Feng,et al.Identifying Aerial Target Fusion Based on the Improved Weighting D-S Theory[J].Modern Defence Technology,2016,44(2):185-189.
[14] SU Xiao-yan,HAN Wen-hua,XU Pei-da,et al.Review of Combining Dependent Evidence[J].Systems Engineering and Electronics,2016,38(6):1345-1350.
[15] ZHAO Sheng-li,ZHOU Jie.A Fault-Tolerant Detection Fusion Strategy for Distributed Multisensor Systems[J].International Journal of Distributed Sensor Networks,2016,12(2): 627-639.
