14自由度整车半主动悬架仿真研究
2017-12-28王孝鹏陈秀萍刘建军
王孝鹏,陈秀萍,刘建军,吴 龙
(1.三明学院 机电工程学院,福建 三明 365004;2.机械现代设计制造技术福建省高校工程研究中心,福建 三明 365004;3.漳州理工职业学院,福建 漳州 363000)
14自由度整车半主动悬架仿真研究
王孝鹏1,2,陈秀萍3,刘建军1,2,吴 龙1,2
(1.三明学院 机电工程学院,福建 三明 365004;2.机械现代设计制造技术福建省高校工程研究中心,福建 三明 365004;3.漳州理工职业学院,福建 漳州 363000)
用MATLAB软件建立基于14自由度整车动力学仿真模型,计算出车身与悬架连接处的速度、悬架动行程及车身俯仰角速度作为半主动悬架控制的输入量;半主动悬架采用自适应双模糊控制器算法进行控制并采用多体动力模型对其进行验证,计算结果表明:采用双模糊控制器在改善整车行驶的舒适性与稳定性有明显作用,车身垂直加速度、俯仰角加速度、侧倾角加速度、车轮1-4悬架动行程改善非常明显,性能分别提升41.7%、47.8%、62.5%、67.2%、85.7%、47.2%、15.8%。
半主动悬架;整车模型;双模糊控制;
14自由度整车模型能较全面的反映整车运动机理,整车模型包括刚性车身的垂向、侧向、俯仰、侧倾、横摆运动,4个轮系的垂向和侧向俩个运动方向,同时还包括驾驶员人椅系统垂向振动的自由度[1-5]。随着微处理器在车辆中的应用逐渐普及,可控悬架可以根据整车行驶的外部信号调整弹簧的刚度与减震器的阻尼,由于其具有调节功能,因此在一定程度上改善悬架系统的性能,使整车的行驶的舒适性与操纵稳定性得到良好的提升。在半主动悬架振动控制中,控制器根据传感器的信息计算所需控制力,而输出信号控制半主动减振器的阻尼特性,由减振器耗散振动机械能,从而达到控制车体振动的目的,相比主动悬架,其结构简单,能耗小[6-8]。模糊控制与其他控制相比:使用语言方法,不需要精确地数学模型;鲁棒性好,适合解决过程控制中的高度非线性、强耦合时变滞后等问题[9-10]。本文通过建立14自由度整车模型,采用模糊控制策略对半主动悬架系统仿真研究并与被动悬架的性能对比。
1 整车模型
14自由度整车模型在建模过程中,将车辆视为多刚体系统,包括簧载质量质量刚体(车身)与4个非簧载质量刚体(车轮及相关附件质量),为简化建模过程,作如下假设:(1)左右车轮受到的垂向与侧向不平度激励是不同的,车辆对其纵轴线左右对称,车辆存在侧倾、俯仰、横摆振动;(2)车轴和与其相联的车轮视为非簧载质量,车轮在中心线上与路面为点接触;(3)由于轮胎阻尼相对于车辆减振器的阻尼来说,小到可以忽略,因此只考虑轮胎的刚度作用;(4)忽略转向系统的摩擦阻力矩以及空气阻力的影响;(5)忽略运动过程中悬架之间的摩擦力;(6)假设车身是一个刚体,车辆在凹凸不平的路面上做等速运动时,车身具有5个运动方向的自由度:垂向、侧向、俯仰、侧倾、横摆;4个轮系分别具有垂向和侧向俩个运动方向的自由度,同时还包括驾驶员人椅系统垂向振动的自由度。车身质心O为坐标系的原点,X轴为车身纵向水平轴,方向指向前进方向,Y轴的正方向为水平指向驾驶员左侧,Z轴垂直向上为正。整车模型如图1所示;整车参数如表1所示;根据简化14自由度整车模型,建立整车动力学方程。
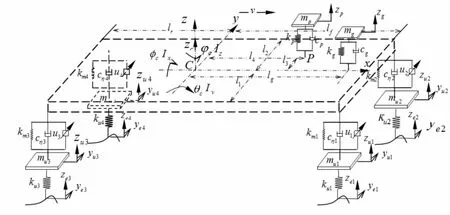
图1 整车简化模型
驾驶座椅处动力学方程

车身垂向、侧向、俯仰、侧倾、横摆动力学方程如下:
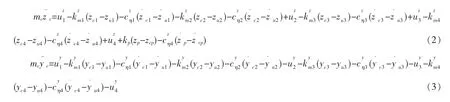

车轮垂向、侧向动力学微分方程如下:
驾驶员座椅系统、车轮与车身连接处与车身质心处位置用下列方程描述:

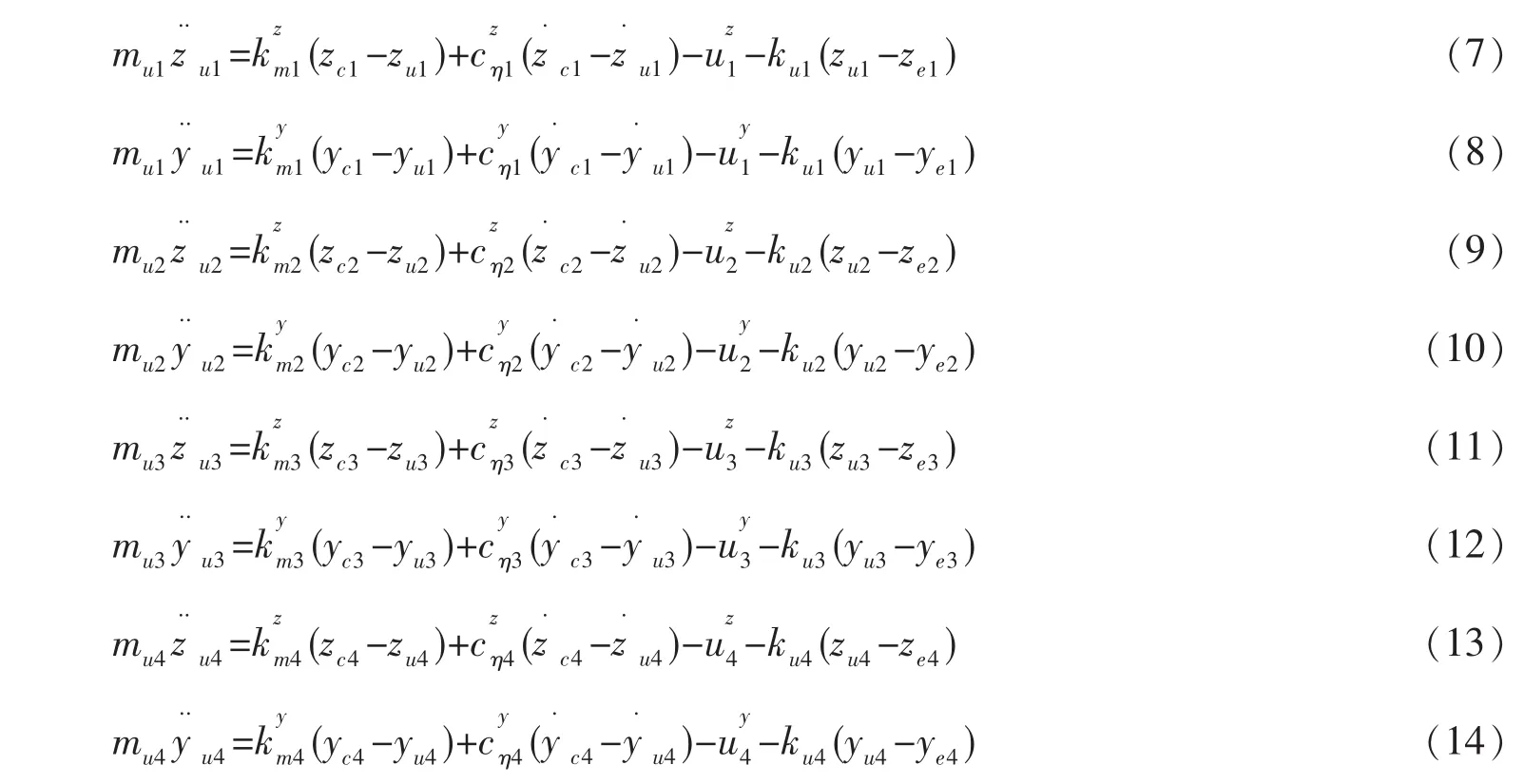
式中 yc、zc:簧载质量在两个方向的位移;Ix、Iy、Iz:簧载质量分别绕 3 个不同坐标的转动惯量;θc、Φc、φc:簧载质量俯仰、侧倾、横摆角位移;zu1~zu4:编号从第 1~4个轮系处的非簧载质量位移;ze1~ze4:车轮底部的路面激励;ku1~ku4:编号从第1~4个轮胎刚度;:编号从第1~4个轮系处y、z方向的簧载质量刚度;:编号从第1~4个轮系处y、z方向的簧载质量阻尼系数;mu1~mu4:编号从第1~4个轮系处的非簧载质量;mp:人及座椅系统质量;:编号从第1~4 个轮系处y、z方向的半主动作动器的输出力;根据公式(1)~(19)建立整车被动悬架仿真模型如图2所示;其中模型为三级仿真系统,输入为不通车速对应的路面模型,已知变量为整车相关参数,包括簧载质量,非簧载质量,转动惯量,弹簧阻尼系数等;系统输出为车身速度,俯仰角,车身与悬架链接处速度与各轮系悬架动行程等。
2 路面模型
对14自由度整车运动机理及悬架性能分析时需要输入路面模型。根据国家标准将公路等级分为8种,在不同的路段测量,很难得到两个完全相同的路面轮廓曲线.通常是把测量得到的大量路面不平度随机数据,经数据处理得到路面功率谱密度.产生随机路面不平度时间轮廓有两种方法,由白噪声通过一个积分器产生或者有白噪声通过一个成型滤波器产生。路面时域模型可用如下公式20描述;考虑在实际行驶过程成中,轮3与轮4和轮1与轮2接受到路面激励的时间都有相对延迟.因此对轮3与轮4加入时间延迟输入.延迟时间为。侧向路面模型曲垂向路面位移大小的五分之一。根据公式建立路面仿真模型如图3所示,路面垂向与侧向位移计算结果如图4所示。

式中q(t)为路面随激励;w(t)为积分白噪声;f0为时间频率;Gq为路面不平度系数;V为汽车行驶速。
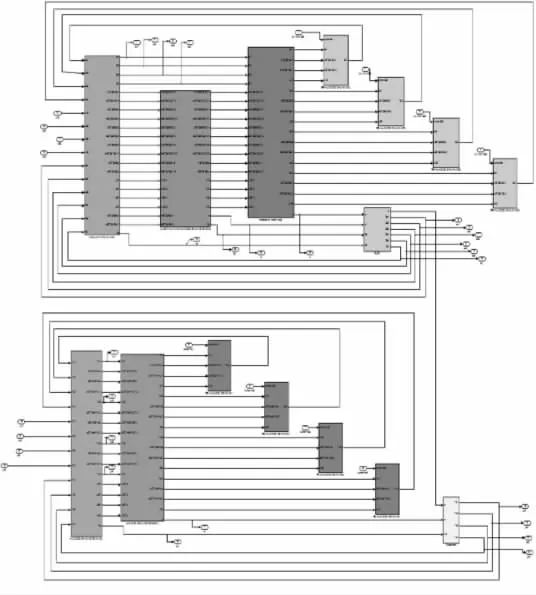
图2 整车被动悬架仿真模型
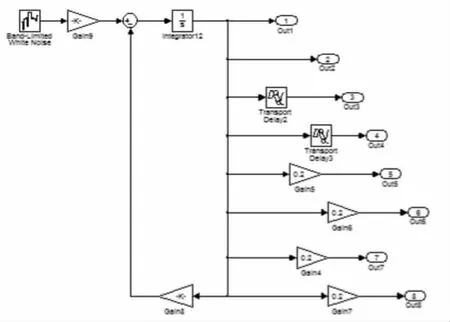
图3 路面时域仿真模型
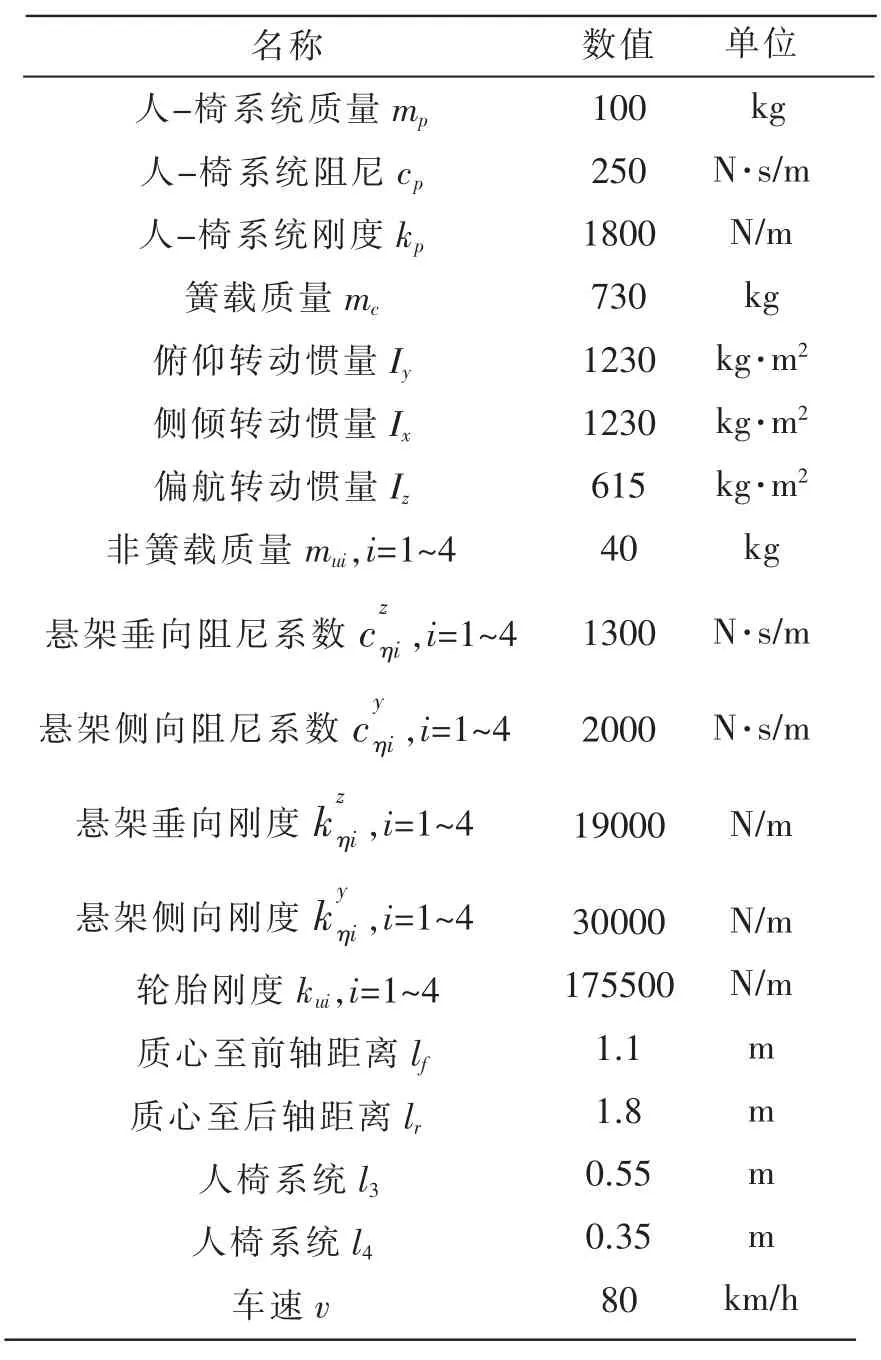
表1 整车参数
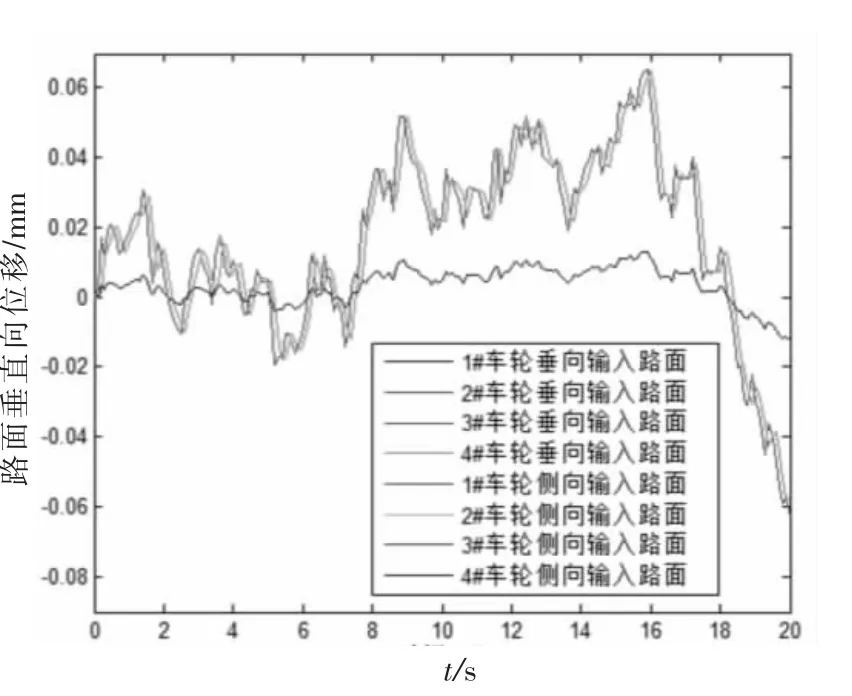
图4 路面垂向与侧向位移
3 双模糊控制器设计
采用双模糊控制器对主动控制力Ui(i=1、2、3、4)进行控制。在控制过程中,以车悬架与车身连接处的速度V与期望值的误差及其变化率作为模糊控制器的输入量、ui1第一主动力输出量;以悬架动行程zci-zui与其期望值的误差及其变化率作为第二个模糊控制器的输入量,ui2作为第二主动力输出量.总控制力分别为第一、二主控制力输出之和,公式如下:

式中ki1、ki2为第一、二输出主控力权系数;ki1大,主控力的输出已第一主控力输出为主,主要用来降低车身的加速度,此时整车行驶在较差的路面上;ki2大,主控力以第二主控力输出为主,主要用来降低整车在行驶过程中的悬架动行程,且主控力越大,悬架动行程变化越小,此时整车行驶在较好的路面上切车速较高.根据公式(21)~(24)搭建悬架系统双模糊控制器输出控制力的仿真计算模型如图5所示 。
模糊控制规则是模糊控制器的核心,它用语言的方式描述了控制器输入量与输出量之间的关系。前后悬架的输入变量分别为车身质心速度及其变化量、车身俯仰角速度及其变化量、后悬架动行程及其变化量.采用 7 个语言变量规则来进行描述:负大(-3)、负中(-2)、负小(-1)、零(0),正小(1)、正中(2)、正大(3)。 输出变量控制力U同样采取7个语言模糊集来进行描述:负大(-3)、负中(-2)、负小(-1)、零(0),正小(1)、正中(2)、正大(3)。
两轴系四车轮第一主控力控制器:悬架与车身连接处的速度、加速度的基本论域为:E=[-0.06,0.06];EC=[-0.6,0.6];两轴系四车轮悬架与车身连接处的速度与期望值的误差及其变化率、量化因子分别为:Ke=3/E=3/0.06=50;Kec=3/EC=3/0.6=5;两轴系四车轮第二主控力控制器:悬架动行程的位移、速度的基本论域为:E=[-0.008,0.008]、EC=[-0.1,0.1];两轴系四车轮悬架动行程的位移与期望值的误差及其变化率、量化因子分别为:Ke=3/E=3/0.008=375;Kec=3/EC=3/0.1=30;两轴系四车轮主动力预控范围为:ui1=[-150,150];ui2=[-30,30];主动力的基本语言变量范围为:E=[-3,3];主控力U1、U2比例因子分别为:KU1=U1/E=150/3=50;KU2=U2/E=30/3=10;模糊化时各输入输出均采用三角形隶属函数,模糊推理采用Mandain法,解模糊采用重心法.在MATLAB模糊控制模块输入模糊控制规则并搭建二维模糊控制结构子系统,模糊控制规则如表2所示。
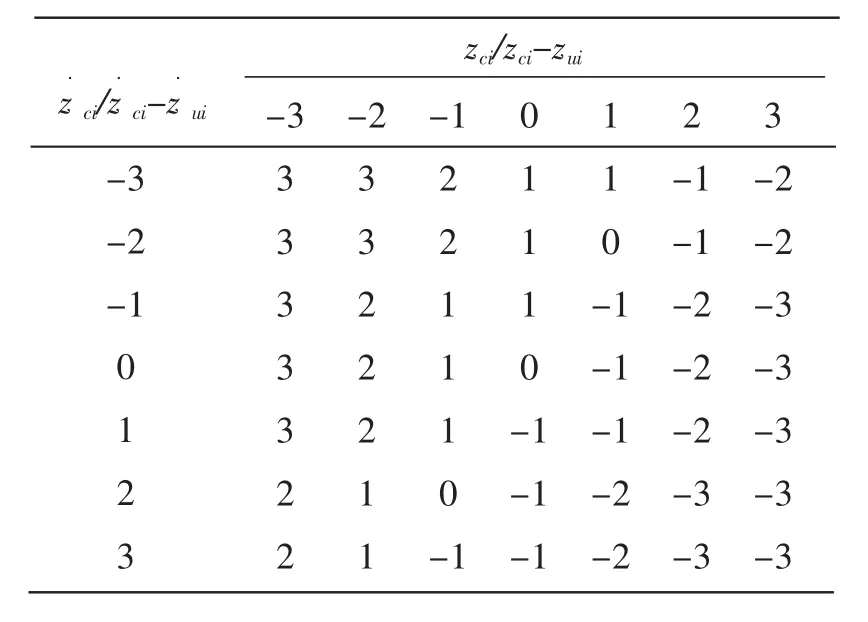
表2 模糊控制规则
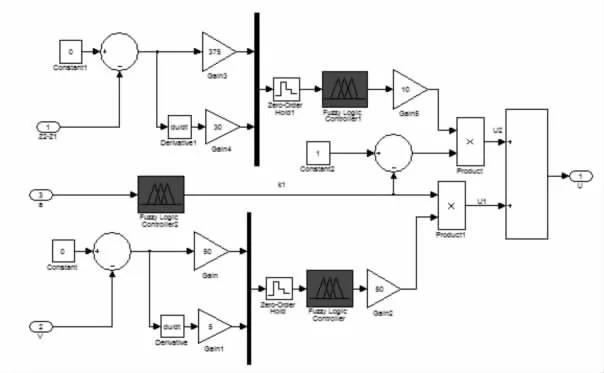
图5 悬架主控力双模糊控制器
整车在行驶过程中采用车身垂向加速度作为输入信号对主控力权系数ki1、ki2进行实时调节,根据ISO2631-1汽车平顺性评价标准,车身垂向加速度大于0.315 m/s2时以舒适性控制为主,小于0.315 m/s2时以操控性控制为主。主控力权系数模糊控制规则如表3所示。以轮1悬架为例:根据公式(21)搭建悬架双模糊控制器输出控制力的仿真计算模型如图5所示。
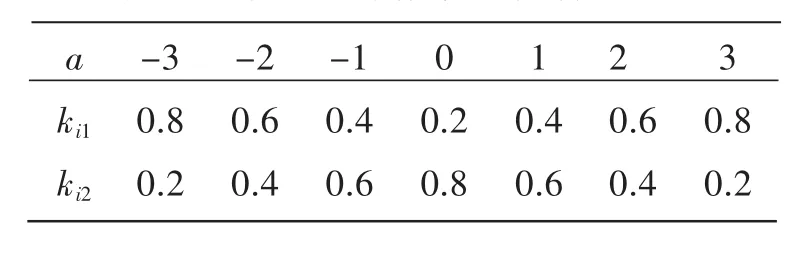
表3 主控力权系数模糊控制规则
4 仿真分析
4.1 数值仿真分析
根据整车14自由度被动悬架仿真模型与双模糊控制器模型,搭建整车主动悬架仿真模型如图6所示。仿真步长为0.005 s,仿真时间为20 s.车身质心处的垂向加速度、俯仰角加速度、侧倾角加速度、横摆角加速度、侧向加速度仿真结果对比曲线如图7~11所示,性能均方根值如表4所示。其中红色实线为半主动仿真结果,蓝色虚线为整车被动模型仿真结果。在垂向方向:质心处垂向加速度的范围由[-0.6 0.6]减少到[-0.4 0.4]之间,俯仰角加速度的范围由[-0.15 0.15]减少到[-0.05 0.05]之间,侧倾角角速度范围由 [-0.08 0.08]减少到[-0.04 0.04]之间;侧向加速度不变,横摆角加速度有增大趋势;轮1与轮2改善效果不明显;轮3与轮4改善效果明显,加速度范围从[-0.6 0.6]降低到[-0.3 0.3];悬架动行程除轮4以外均达到了较好的改良效果。轮胎的侧向动位移的范围并没有较大的变化,说明在侧向上,轮胎的变形的趋势的不变的,但是轮胎侧向动位移的幅值有小幅度的减少;驾驶员悬架加速度比传统整车的加速度的范围减小,从[-0.2 0.3]减少到[-0.15 0.2]。改良效果明显,最大值减少百分比为33.3%。从计算结果看,双模糊控器在改善整车的平顺性及稳定性方面有明显的作用,整车平顺性改善要好于操作稳定性,具体原因如下:(1)悬架的侧向刚度及阻尼系数相对于垂向参数较大,弹簧及减震器的安装接近于垂直方向,侧向力作用不明显;(2)整车模型中忽略了轮胎作用,只考虑轮胎的垂向刚度,轮胎与地面的接触面积即地面对轮胎提供侧向力时改善操纵稳定性的最主要原因。
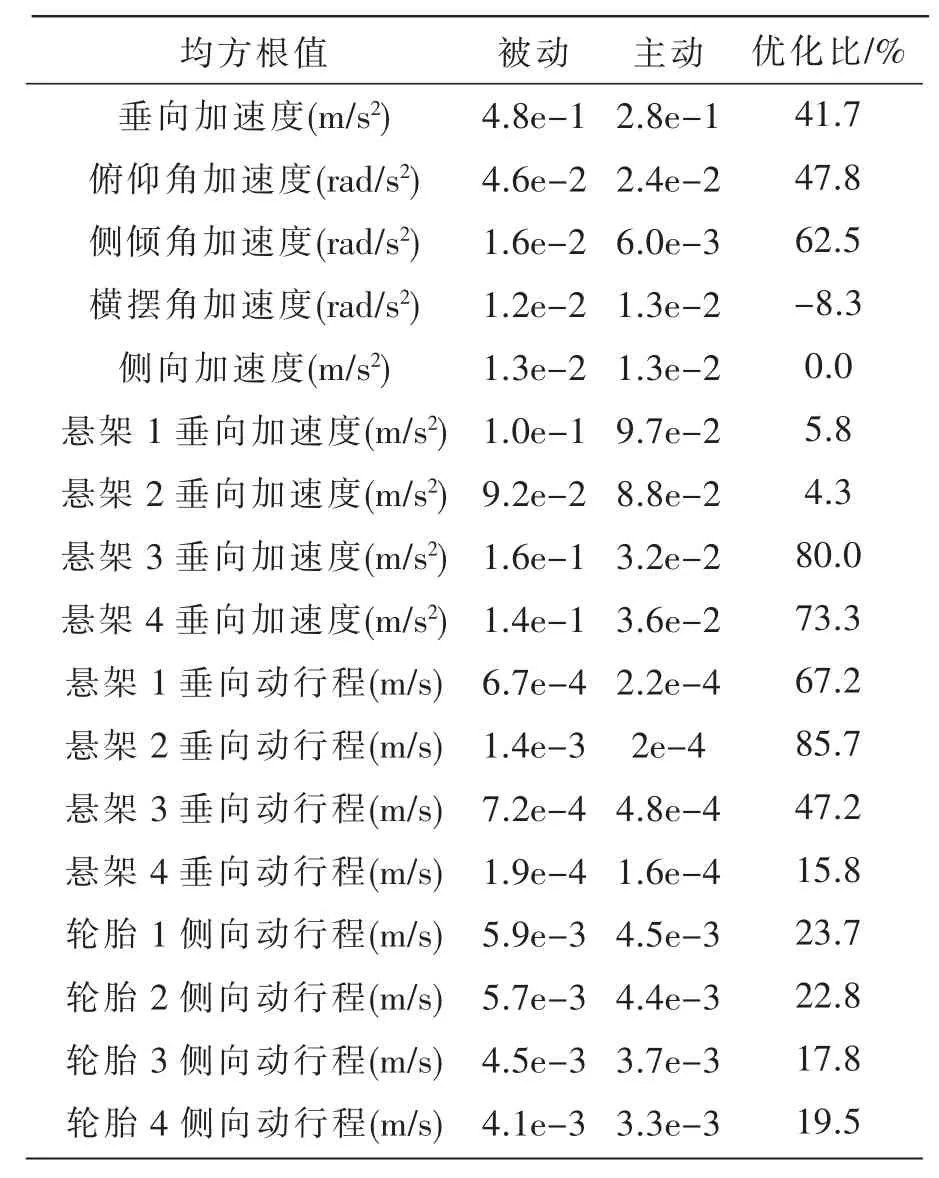
表4 性能均方根值
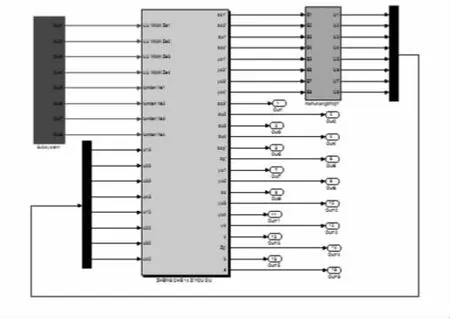
图6 整车主动悬架仿真模型
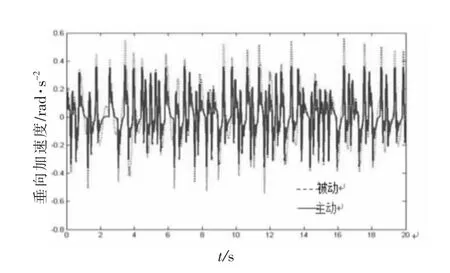
图7 车身质心处垂向加速度
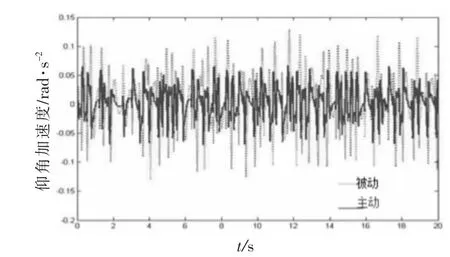
图8 车身质心处俯仰角加速度
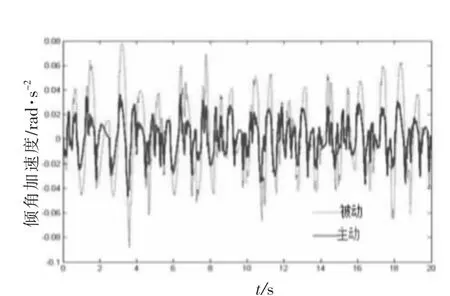
图9 车身质心处侧倾角加速度
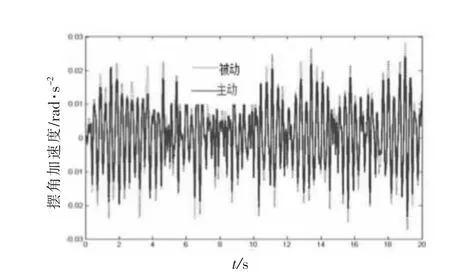
图10 车身质心处横摆角加速度
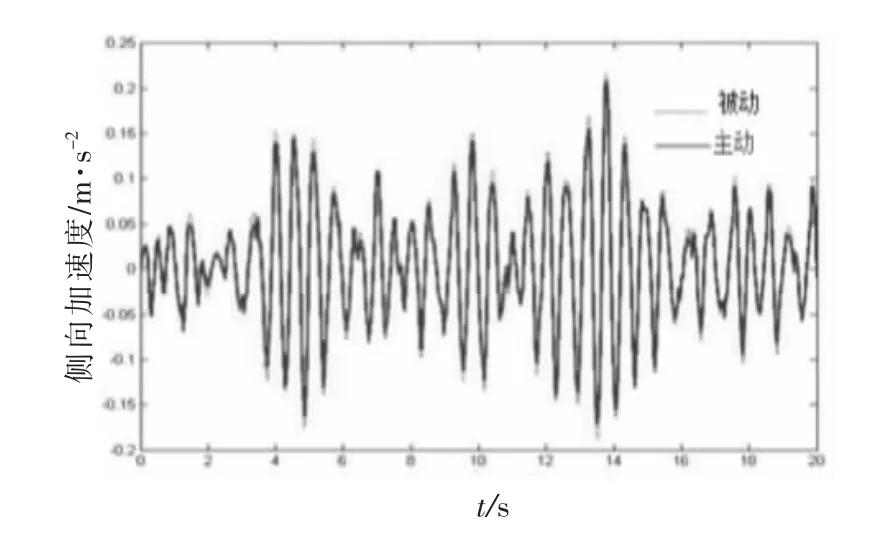
图11 车身质心处侧向加速度
4.2 整车多体模型验证
由于实验条件限制,采用虚拟14自由度多体动力学整车模型对数值计算结果机型验证。整车模型包括25个移动部件、4个固定副、13个转动副、3个胡克副、7个球副、1个耦合副,2个恒速副、1个圆柱副、经计算整车有13个自由度。后轴悬架采用离散梁连接左右两侧车轮,保证悬架的扭转刚度,整车多提模型如图12所示。控制算法同为双模糊控制器,建立联合仿真控制模型如图13所示。经计算多体模型车身垂向加速度在半主动悬架与被动悬架两种情况下对应的数值分别为2.38E-1、4.52E-14;半主动悬架相对被动悬架性能提升47.3%,计算结果如图14所示;与数值仿真对比,车身垂向加速度在半主动悬架与被动悬架两种情况下对应的数值分别为2.8E-1、4.852E-1,性能提升41.7%。两种模型的性能提升误差为5.6%,误差较小,说明了双模糊控制器在对半主动悬架控制过程中的正确性与使用性。
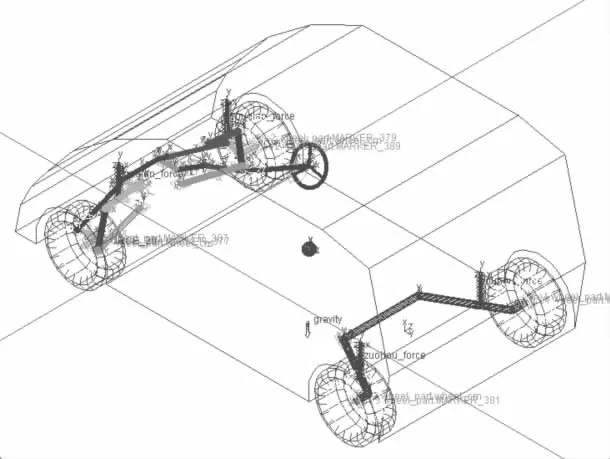
图12 整车模型
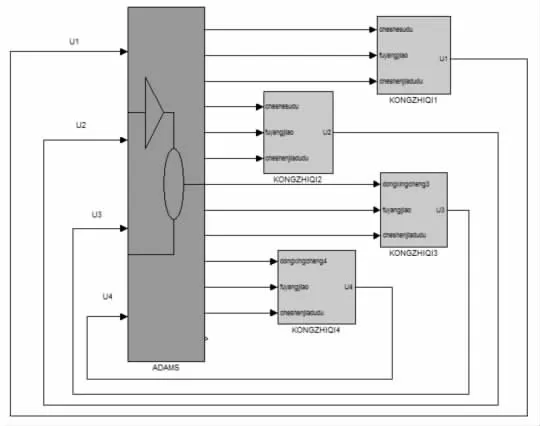
图13 整车半主动悬架联合模型
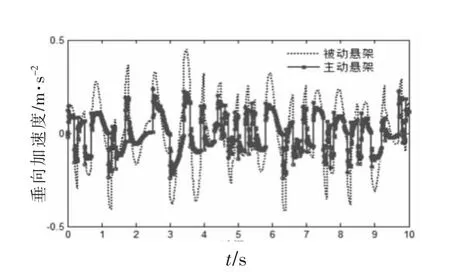
图14 车身垂向加速度
5 结论
通过建立整车14自由主动悬架模型,并提出双模糊控制策略概念,采用整车多体动力学模型对数值分析结果进行了验证。经计算分析可得出如下结论:
(1)车身质心处的垂向加速度、俯仰角加速度、侧倾角加速度、侧向加速度、车轮1-4悬架动行程、车轮1-4悬架垂向加速度都有很好的改善,系统综合特性较好.其中车身垂直加速度、俯仰角加速度、侧倾角加速度、车轮1-4悬架动行程改善非常明显,性能分别提升41.7%、47.8%、62.5%、67.2%、85.7%、47.2%、15.8%。
(2)车身质心处的横摆角加速度并没有改善,性能下降8.3%;侧向加速度没有发生变化,轮胎1-4垂向动行程并没有太大的变化,由于轮胎刚度较大,所以轮胎动位移的改良效果会不明显;
(3)双模糊控制器对整车参数相对不敏感、相比传统模糊控制器,系统综合性能优越,鲁棒性强。
[1]张昆,习文辉,邓文华,等.基于CarSim-Simulink联合仿的整车半主动悬架模糊控制仿真研究[J].昆明理工大学学报,2015,40(1):39-44.
[2]刘静.带天棚阻尼的 1/2 车辆主动悬架仿真研究[J].公路与汽运,2015,166(3):15-20,80.
[3]HUANG C,CHEN L,JIANG H B,et al.Fuzzy chaos control for vehicle lateral dynamics based on active suspension system[J].Chinese Journal of Mechanical Engineering,2014,27(4):793-801.
[4]YOSHIMURA T,TERAMURA I.Active suspension control of a one-wheel car model using singlei-nput rule modules fuzzy reasoning and a disturbance observer[J].Journal of Zhejiang University Science A,2005,6(4):251-256.
[5]DOYNG X M,YU M.Genetic algorithm based fuzzy logic control for a magneto-rheological suspension[J].Journal of Vibration and Control:Jvc,2014,20(9):1343-1355.
[6]HUANG S T,CHEN Z Y,CHEN D Y,et al.Signal frequency based self-tuning fuzzy controller for semi-activesuspension system[J].Journal of Zhejiang University Science,2003,4(4):426-432.
[7]YU Y,WEI X X,ZHANG Y F,et al.Analyses and simulation of fuzzy Logic control for suspension system of a track vehicle[J].Journal of Beijing Inistitute of Technology,2008,17(2):164-167.
[8]XU X,ZHOU K K,ZOU N N,et al.Hierarchical control of ride height system for electronically controlled air suspension based on variable structure and fuzzy control theory[J].Chinese Journal of Mechanical Engineering,2015,28(5):945-953.
[9]SU X J,YANG X Z,SHI P,et al.Fuzzy control of nonlinear electromagnetic suspension systems[J].Mechatronics:The Science of Intelligent Machines,2014,24(4):328-335.
[10]LI R,CHEN W M,LIAO C R, et al.Fuzzy hybrid control of vibration attitude of full carvia magneto-rheological suspensions[J].Chinese Journal of Mec hanical Engineering,2010,23(1):72-79.
Simulation Research of Semi-active Suspension Based on Fourteen Degrees of Freedom Vehicle
WANG Xiao-peng1,2,CHEN Xiu-ping3,LIU Jian-jun1,2,WU-Long1,2
(1.School of Mechanical&Electronic Engineering,Sanming University,Sanming 365004,China;2.Engineering Research Center in Fujian Province University for Modern Mechanical Design and Manufacturing Technology,Sanming 365004,China;3.Zhangzhou Institute of Technology Vocational College,Zhangzhou 363000,China)
The simulation model of vehicle dynamics based on 14 degree of freedom was established by MATLAB software,the speed of the connection between the body and the suspension,the dynamic travel of the suspension and the pitch angle of the vehicle body are calculated as the input of the active suspension control.The semi-active suspension is controlled by an adaptive dual-fuzzy controller algorithm and the multi-body dynamic model is used to verify it.The results show that dual fuzzy controller plays a significant role in improving vehicle ride comfort and stability;body vertical acceleration,pitch angular acceleration,roll angle acceleration,wheel suspension dynamic travel 1-4 are improved significantly while the performance are improved by 41.7%,47.8%,62.5%,67.2%,85.7%,47.2%,15.8%respectively.
semi-active suspension;whole vehicle model;doublefuzzy control;
U270.1
A
1673-4343(2017)06-0025-08
10.14098/j.cn35-1288/z.2017.06.004
2017-09-10
福建省中青年教师教育科研项目(JAT170529)
王孝鹏,男,山西临猗人,讲师。主要研究方向:车辆系统动力学及控制。
朱联九)
