多模式下风电直流微网功率协调控制策略研究*
2017-12-20张敏付媛王毅袁鑫
张敏,付媛,王毅,袁鑫
(华北电力大学新能源电力系统国家重点实验室,河北保定071003)
0 引 言
直流微电网中包含多种类型的分布式发电、负载单元、储能装置和并网变流器[1-4]。微网在不同工况和电网扰动下,各单元换流站的功率平衡是提高能源利用率和系统运行可靠性的保证。
近年来,对直流微电网的结构、运行模式、控制方法已有大量研究。文献[5]提出一种适用于光伏直流微电网系统的能量管理与协调控制方法,该方法将系统划分为4种工作模态,分析了各工作模态的转换条件和控制方法,但只考虑了并网运行和孤岛运行的情况,缺少对换流站限流、短时故障等多种工况的讨论。文献[6]研究了交直流混合微电网在并网运行和孤岛运行时各换流站的控制策略,但忽略了孤岛运行时微网内部功率不足,蓄电池出现深度放电情况的考虑。文献[7-8]针对直流微电网的不同工况,提出了一种电压分层的协调控制方法,但是控制相对复杂。文献[9]将多端直流系统分为3种运行模式,在系统负荷大幅突变后,采用虚拟惯性控制和调整桨距角的方法,达到改变风机出力的目的。以上文献均对直流微电网的稳定运行提出了有效的控制策略,但对于系统在多种运行模式下,如何进行平衡切换和功率协调未见文献提及。
为此,文章首先考虑微网的运行方式和换流站功率裕量,将直流微电网系统分为5种运行模式,并给出每种模式的切换条件,进而提出了一种基于多变量的功率协调控制策略,根据并网变流器电流、蓄电池荷电状态以及直流电压的变化量自动调节各端换流站的工作方式,保证微网的稳定运行。最后,在MATLAB/Simullink中建立模型,对风电直流微电网在不同运行模式下的情况进行仿真,验证所提出功率协调控制策略的控制效果。
1 风电直流微网的构成和运行模式
1.1 风电直流微网的构成
风电直流微网的整体结构如图1所示,主要由分布式发电单元、储能单元、负荷单元和并网变流器组成。
图1 风电直流微网结构Fig.1 Structure of the wind turbine-based DCmicro-grid
分布式发电单元由全功率笼型异步风电机组构成,通过换流器W-VSC并入直流微电网。其主要功能是实现风机侧的有功无功解耦[10]和最大功率跟踪跟踪(Maximum Power Point Tracking,MPPT)。
储能单元采用蓄电池储能(Battery Energy Storage,BES),通过双向DC/DC换流器接入直流网络并实现充放电功能,DC/DC换流器为Buck/Boost型变换器,采用电压和电流环的双闭环控制策略。
负载单元由交流负载和直流负载组成,直流负载直接连接在直流母线上,而交流负载通过换流器L-VSC并入直流网络。
并网变流器(G-VSC)将直流网络和交流主网连接,正常运行时,并网换流器的作用就是实现主网和微电网能量的双向流动,保证直流母线电压稳定。
1.2 风电直流微网的多种运行模式及其切换条件
综合考虑微网的运行方式和换流站功率裕量,提出以下的5种运行模式,各模式下具体的协调控制流程图如图2所示。
(1)并网运行模式(Model 1):该模式下,并网变流器G-VSC作为功率平衡节点,起到稳定直流母线电压的作用,笼型异步风电机组工作在最大功率跟踪状态,蓄电池充电储能;
(2)限流运行模式(Model 2):直流微电网并网运行后,由于负载突增的原因,导致电网需要输出的功率超过了网侧换流器的额定功率,此时G-VSC饱和,输出电流被限定在IG_max,失去了稳定直流母线电压的作用,电压跌落,此时蓄电池放电,补偿功率的缺额,稳定直流电压;
(3)短时故障运行模式(Model 3):该模式主要应对电网发生短时故障导致G-VSC功率交换受限制的情况,此时蓄电池放电,控制直流电压,当电网故障清除之后,电网电压恢复,Model 3切换到Model 1;
(4)孤岛减载运行模式(Model 4):该模式下,风机、蓄电池和负载功率需要保持平衡以稳定直流电压。当风速较小且负载较大时,DC/DC换流器饱和,输出电流嵌位在IB_max,无法有效控制直流母线电压。综合考虑蓄电池的使用寿命,因此,当IB≥IB_max或蓄电池SOC≤40%时,需要切除部分次要负载;
(5)孤岛降功率运行模式(Model 5):该模式下,风机发电功率大于负载功率,蓄电池充电储能。当SOC>80%时,蓄电池停止工作,电网内部能量过剩,直流电压升高,需要调整风机的桨距角,降低捕获的风能。
2 风电直流微网的功率协调控制策略
微网并网运行时,风机进行MPPT控制,输送捕获风能,蓄电池恒流充电,直至SOC达到限值80%。并网换流器G-VSC采用下垂控制将直流电压稳定在0.98 pu~1.02 pu。当负载突增过大或者交流侧出现故障时,微网切换到限流和短时故障的模式,此时G-VSC由于饱和或者故障退出,失去对直流电压的控制作用,当|ΔUdc|>0.02 pu时,蓄电池采用电压下垂控制,重新稳定直流电压。当微网孤岛运行时,就要根据风电输入功率和负载功率的大小,选择是要切除次要负载还是风机降功率运行。

图2 直流微网协调控制流程图Fig.2 Coordinated control flow char of DCmicro-grid
(1)W-VSC的协调控制策略:风电机侧的换流站在Model 1~Model 4中都运行在最大功率跟踪的工作状态下。但是在Model5中,蓄电池SOC达到80%之后就退出运行,此时风电功率大于负载功率,可以通过开环桨距角控制,减小风电机组出力,使得微电网内部功率重新平衡。
(2)G-VSC的协调控制策略:G-VSC在 Model 1和Model 2中起到稳定直流电压的作用,它采用双闭环矢量控制,内环是电流控制环,外环采用电压下垂控制,其直流电压-电流的下垂特性曲线可表示为:

式中 kG为下垂系数,kG=0.02/IG_max,IG_max为直流侧电流的最大值,和 Udc_G分别为直流电压的参考值和实际值。
G-VSC采用电网电压定向的矢量控制策略,在dq同步旋转坐标系下,并网侧和直流侧的有功功率可表示为:

式中Pg为换流站交流侧输入的有功功率,Ugd、Igd分别为G-VSC交流侧电压和电流矢量的d轴分量。Pdc_G、Udc_G、Idc_G分别为 G-VSC直流侧的功率、电压和电流。
根据功率守恒,由式(1)~式(3)可知G-VSC采用下垂控制时的内环电流参考值为:

本文只考虑有功功率的传输,故无功电流指令都给定零。G-VSC下垂控制的实现框图如图3所示。

图3 G-VSC的控制策略Fig.3 Control strategy of G-VSC
(3)Bi-VSC的协调控制策略:蓄电池侧 DC/DC换流站采用双闭环控制,一旦G-VSC因故失去对直流电压的控制作用,BES就通过充放电来维持微网内的功率平衡。其 Udc_B-Idc_B下垂特性可表示为:

式中kB为下垂系数;和 Udc_B分别为 DC/DC直流母线侧电压的参考值和实际值。
由功率守恒可知,DC/DC在下垂控制策略下内环电流的参考值为:

式中UB为蓄电池的电压,BES单元下垂控制的实现框图如图4所示。

图4 BES控制策略Fig.4 Control strategy of BES
(4)L-VSC的协调控制策略:L-VSC需要保证供电电压幅值恒定,换流站采用定交流电压的控制方式可以实现上述目标。交流电压us经过PI调节器与指令值us_ref的自动跟踪,保证电压幅值恒定。具体的控制策略如图5所示。

图5 L-VSC控制策略Fig.5 Control strategy of L-VSC
3 仿真分析
3.1 系统简介
本文利用Matlab/Simulink仿真软件搭建了如图1所示的直流微网系统,系统包含5台20 kW的全功率笼型异步风力发电机组,直流微电网直流母线电压为1 200 V,并网变流器G-VSC额定容量为60 kW,仿真时风力发电系统视为等值机组。储能系统采用容量为20 kWh的蓄电池,额定电压400 V。直流微电网含有两个直流负载L1、L2以及两个交流负载L3、L4,其中 L1、L2为电阻性负载,L3、L4为额定电压 220 V、频率50 Hz的恒功率型负载,L1~L4重要性依次降低。
仿真中规定G-VSC、DC-DC的功率以流向变流器为正方向,风机转速以及直流母线电压均采用标幺值。下面分别对并网、变流器限流、短时故障和孤岛减载以及风机降功率运行的模式进行仿真。
3.2 仿真算例1
风电直流微电网在并网运行(Model 1)的仿真结果如图6所示。仿真开始时,风速为 8 m/s,风电机组在MPPT状态下运行,输出功率约为34.6 kW。负荷 L4(20 kW)和 L2(10 kW)接入微网,负载总功率30 kW。蓄电池SOC初始值为79.4%,并网后开始充电,充电功率约4.5 kW,此时交流主网与直流微电网几乎没有功率交换,直流母线电压也被G-VSC控制在1.002 pu。第4 s时风速阶跃变化到11 m/s,风机发出的功率增加到75 kW,而负载和蓄电池充电功率恒定,多余的功率流向交流主网。第6 s时 L1(10 kW)接入网,且SOC达到设定的上限值80%,停止充电。第10 s时L3(20 kW)接入微网,12 s时风速减小至9 m/s,14 s时L3又与微网断开。到16 s时,风机输出功率48 kW,负载功率40 kW,电网吸收功率约为8 kW,功率守恒。
由图6可以看出,并网运行时,G-VSC能够根据风速和负荷的变化,利用下垂控制调节直流微网与交流主网的不平衡功率,维持直流母线电压稳定。
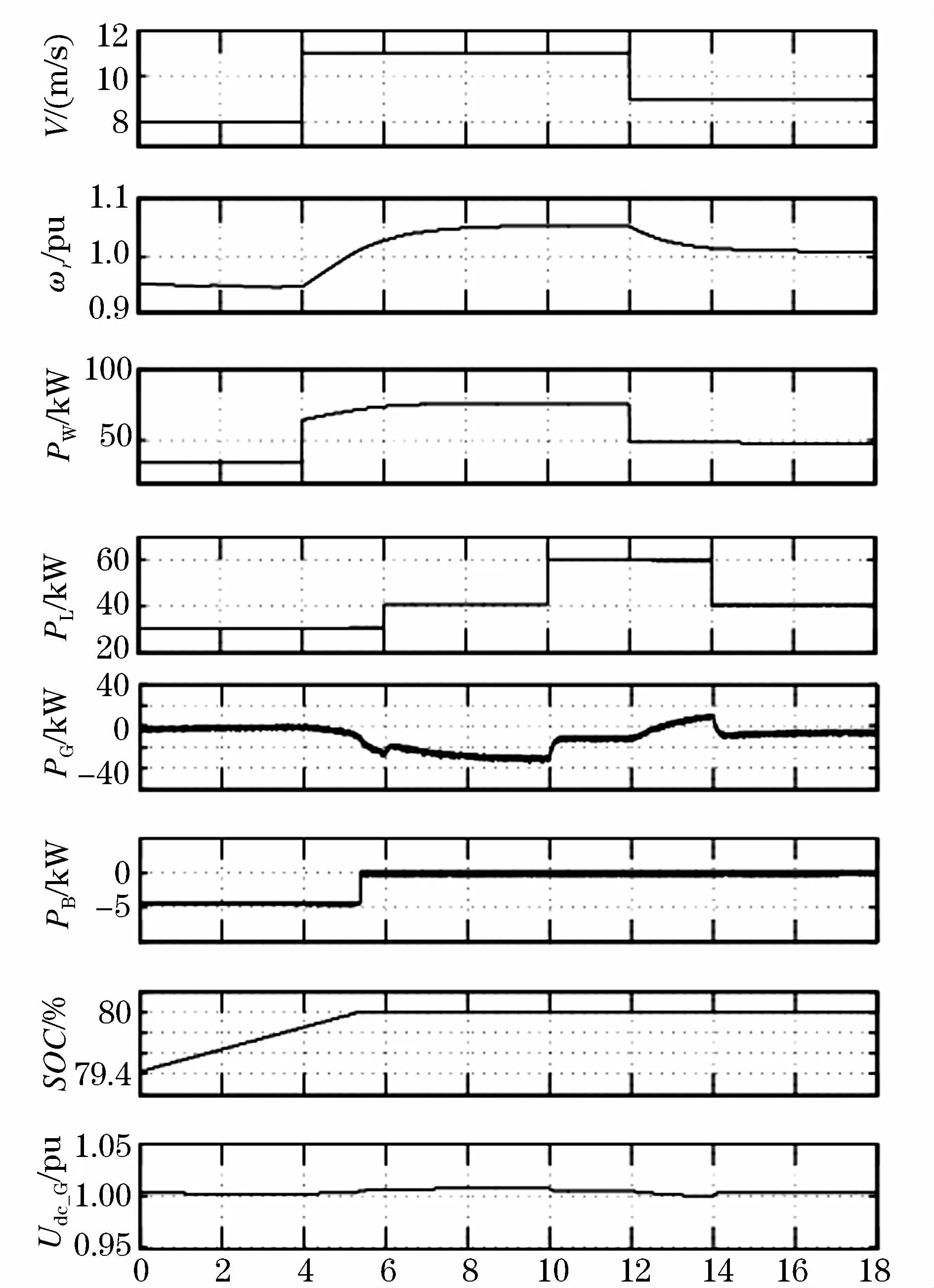
图6 并网运行模式下的仿真结果Fig.6 Simulation result under grid-connected operation mode
3.3 仿真算例2
风电直流微网在限流运行(Model 2)模式下,仿真结果如图7所示。算例中风电机组输出功率始终为34.6 kW,负载功率50 kW,蓄电池以4.5 kW的功率放电,此时G-VSC向直流微电网提供12 kW的功率,直流母线电压稳定。第6 s时,负载突增至108 kW,G-VSC提供的功率很快达到上限值60 kW,PI调节器饱和,G-VSC失去了对直流母线电压的控制作用,直流电压迅速下降,不过很快BES单元做出响应,切换到电压控制模式,相应地增大放电功率至15 kW,补偿微电网的功率缺额,将直流电压稳定在0.98 pu左右。第10 s时,切除20 kW的负载,G-VSC输入到微电网的功率下降,控制器退饱和,重新恢复对直流母线电压的控制作用,直流电压上升。第14 s时,又切除了50 kW的负载,BES单元和G-VSC输入的功率都减小,恢复到刚开始仿真时的功率补给状态,直流电压重新稳定。

图7 限流运行模式下的仿真结果Fig.7 Simulation result under current-limited operation mode
由图7可以看出,在6 s~10 s期间,即使G-VSC因为限流饱和失去稳定直流电压的作用时,BES单元也能切换到电压控制模式重新稳定直流电压,实现了Model 1与Model 2之间的平滑切换。
3.4 仿真算例3
直流微电网出现短时故障(Model 3),参数设置与3.3相同,仿真结果如图8所示。负载功率始终为55 kW,开始时蓄电池以8 kW左右的恒定功率充电,G-VSC向微电网提供约为28 kW的功率,直流母线稳定在0.994 pu。在4 s时电网发生持续时间为500 ms的三相短路故障,使G-VSC工作在限流模式而无法稳定直流母线电压,Udc_G迅速跌落。到4.4 s时,Udc_G数值已经下降到0.975 pu,BES单元迅速切换到电压控制模式,以15 kW的功率放电,Udc_G开始回升。4.5 s后故障切除,G-VSC恢复到正常工作状态。
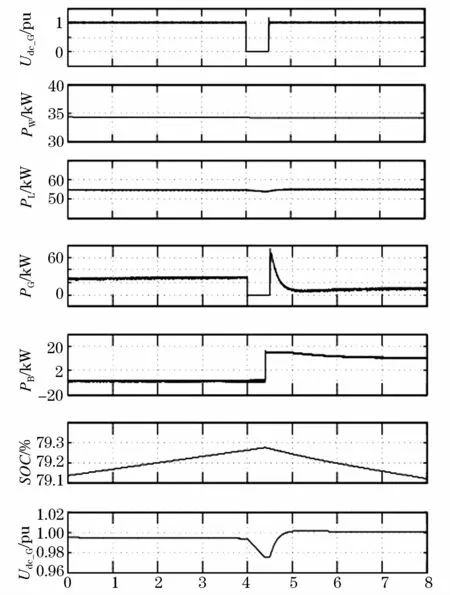
图8 短时故障运行模式下的仿真结果Fig.8 Simulation result under short-time failure operation mode
由图8可以看出,在微电网发生短时故障,通过BES单元的控制模式转换,能够使系统恢复到正常的工作模式,实现Mode l~Model 3之间的平滑切换。
3.5 仿真算例4
直流微电网运行在孤岛减载模式下,仿真结果如图9所示。直流微电网最初稳定运行在孤岛模式,风速为9 m/s,输出功率47.8 kW,负载功率65 kW,蓄电池约以9 kW的功率充电,SOC初始值为40.3%,G-VSC向微电网提供功率为27.5 kW,直流母线电压稳定在1 pu。
第6 s时,直流微电网切换到孤岛运行模式,GVSC输入功率瞬间变为零,BES单元由充电模式切换到电压控制模式,以19 kW的最大放电功率向微电网补偿功率缺额,由于|ΔPB|≈|ΔPG|,直流电压基本还能保持稳定。第8 s时,风速降低到8 m/s,风机输出功率降低,微电网内部功率不平衡,直流母线电压开始下降,到10 s时 Udc_B数值为0.96 pu,需要切除负载,保证微网稳定运行,此时L4(20 kW)被切除。负载切除后,直流母线电压开始上升,但是BES单元保持最大功率放电,在12 s时其SOC数值降到了40.1%,为了避免蓄电池深度放电,此时又切除了负荷L3(20 kW)。由于风电输送功率PW(34.6 kW)>PL(25 kW),BES单元重新开始充电,SOC上升,到18 s时直流母线电压稳定在1.002 pu。

图9 孤岛减载运行模式下的仿真结果Fig.9 Simulation result under islanded load-off operation mode
3.6 仿真算例5
直流微电网在孤岛降功率模式下运行,仿真结果如图10所示。风速恒定为8 m/s,输出功率34.6 kW,负载功率26 kW,蓄电池以8 kW的功率充电,直流电压保持稳定。4.3 s时,SOC达到上限值80%,蓄电池停止充电。由于PW>PL,直流电压不断上升,当Udc_B>1.02 pu时,采用调整桨距角的策略降低风机输入功率。桨距角β从0°上升到9°,风电功率PW也降低到了19.3 kW,此时PW<PL,直流电压又逐渐降低。第 14 s时,Udc_B<0.99 pu,为了遏制直流电压下降趋势,保证微电网功率平衡,BES单元重新投入电网,并切换到电压控制模式,此时蓄电池以8 kW的功率放电,补充风电机组与负载单元的功率差额,直流电压重新上升,到18 s时,基本稳定在1.0 pu。

图10 孤岛降功率运行模式下的仿真结果Fig.10 Simulation result under islanded power-down operation mode
通过Model 4和Model 5的仿真可以看出,直流微电网孤岛运行模式下,当出现负载或者风电机组输出功率过大而导致BES不能稳定直流电压时,可以通过切除负载和风机减载运行解决上述问题,实现孤岛运行模式和并网运行模式的平滑切换。
4 结束语
在对风电直流微电网的多种运行模式进行研究的基础上,提出了一种在基于多变量的功率协调控制策略,实现了风电直流微电网系统在多种运行模式下的功率平衡。综合考虑了微网的运行方式和换流站功率裕量,提出了风电直流微电网的五种运行模式及其切换条件,避免了多换流站过载,同时保证了多种模式的平滑切换,也为进一步提出功率协调控制方案奠定了基础。提出了基于并网换流器电流、蓄电池SOC以及直流母线电压变化量等多变量的功率协调控制策略,既提高了各端换流站的功率协调能力,又维持了多种运行模式下直流电压的恒定,从而保证了风电直流微电网系统的运行稳定性。
