一种简化SVPWM算法研究与实现*
2017-12-20檀永侯明国张道农
檀永,侯明国,张道农
(1.国电南瑞科技股份有限公司智能电网保护和运行控制国家重点实验室,南京210061;2.华北电力设计院有限公司,北京100120)
0 引 言
空间矢量脉宽调制SVPWM技术是在20世纪80年代提出的一种先进的PWM技术,它通过控制复平面的电压空间矢量,使其磁链轨迹尽量逼近圆形,从而达到减少开关器件的开关次数、提高直流电压利用率、获得较好的谐波抑制效果的目的。与传统的正弦矢量调制SPWM技术相比,其开关器件的开关次数可以减少1/3,直流电压利用率可提高15%,且易于实现实时的数字化控制[1-7]。
本文在研究基于转子磁场定向FOC的永磁同步电机控制的基础上,通过对SVPWM算法的基本原理及实现方法的深入研究,提出了一种简化的SVPWM算法,并在基于ARM Cortex-M4内核的高性能处理器STM32F407上,实验验证了该简化算法的可行性。图1描述了基于转子磁场定向FOC的永磁同步电机控制的基本模型[8]。

图1 i d=0的永磁同步电机FOC矢量控制基本架构Fig.1 Basic structure of FOCmotor control with i d=0
1 SVPWM的基本原理
一个典型的两电平三相三线PWM逆变器拓扑结构如图2所示。
其中,Udc是直流母线电压,UAO、UBO、UCO是负载相电压,线电压的表达式如下:

图2 两电平三相三线PWM逆变器Fig.2 DC/AC PWM converter
若把图2上臂中与A,B,C相连的开关管的开关状态(Sa,Sb,Sc)作为其开关状态量,1表示导通,0表示截止,则有(0,0,0)至(1,1,1)共8个状态量。
每一种开关状态输出的合成电压空间矢量Up分别记为U0至U7,其中U0与U7为零矢量,其他六个则为非零矢量,这八个矢量统称为基本矢量。若开关状态量(Sa,Sb,Sc)每600切换一次,则可将电压矢量空间分为6个扇区,其矢量分布如图3所示。

图3 电压矢量和扇区空间分布Fig.3 Voltage vector and space sector
利用这八个基本电压矢量来线性拟合期望参考电压矢量,是SVPWM的基本思想。因此,在一个PWM输出周期Ts内,输出电压矢量Vo可由其扇区内的两个相邻矢量加上零矢量构成。根据伏秒平衡原理,各基本矢量的作用时间满足式(2)[9]。

经过数学推导[10],可以求出 Tx、Ty、Tz的数学表达式如公式(3)所示。其中,M是直流电压利用率,通常也称为调制深度或者调制比。
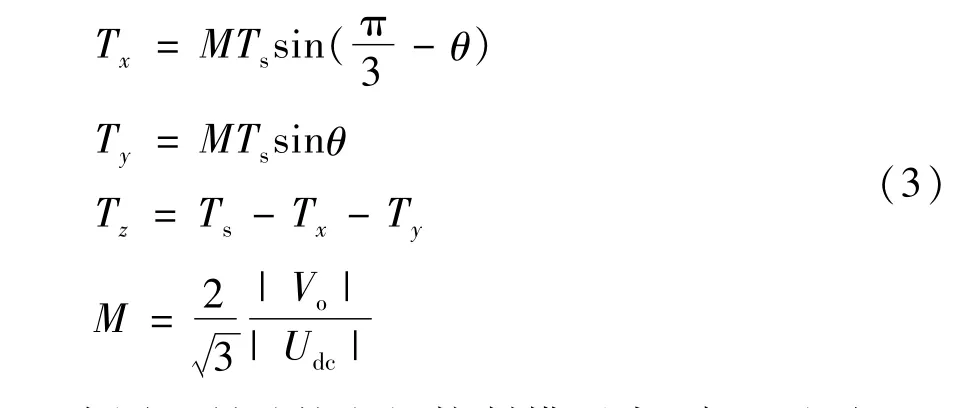
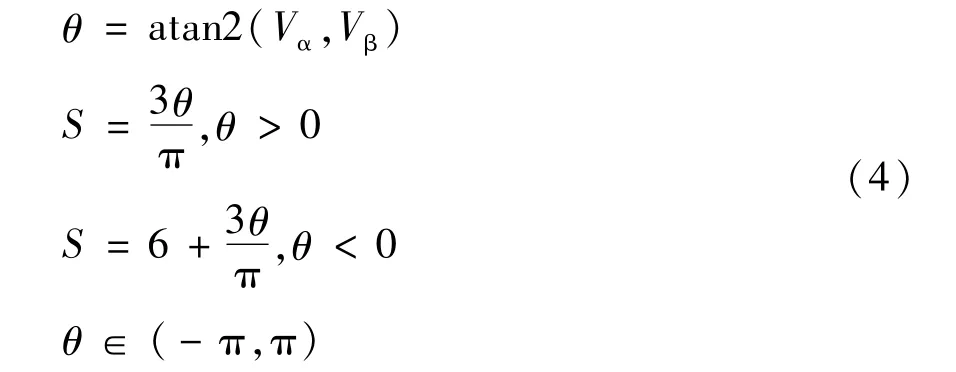
在图1所示的电机控制模型中,当经过逆Park变换,求出αβ坐标系下的电压参考Vo=Vα+j Vβ矢量后,需要根据式(4)通过反正切函数运算求出该合成电压矢量的相角θ,再根据θ求得扇区号S,并根据式式(3)计算基本电压矢量的作用时间。
由上文可以看出,基本的SVPWM空间矢量算法需要使用反正切函数及求平方根等数学运算,其算法实现较为复杂、计算量大、计算精度也会受到不可忽视的影响,而且很难满足电机控制的实时性要求。
2 简化SVPWM算法
对式(3)使用三角函数公式展开,并结合式(5):

可以推导出式(6):
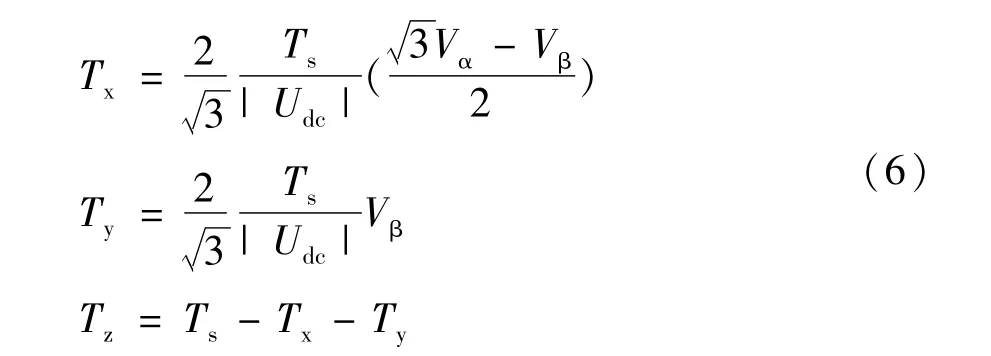
为分析方便,令:
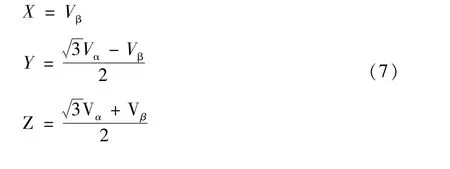
根据式(7),并结合各扇区 Vα、Vβ的数学关系,可以方便的推导出各扇区的分布情况。以第一扇区为例,当合成电压矢量Vo位于第一扇区时,Vα、Vβ、的数学关系如式(8)。

从而可以得出:X>0,Y>0,Z<0;依次类推,可以得到表1所示的扇区分布表格。

表1 扇区分布与XYZ的关系Tab.1 Relationship between sectors and XYZ
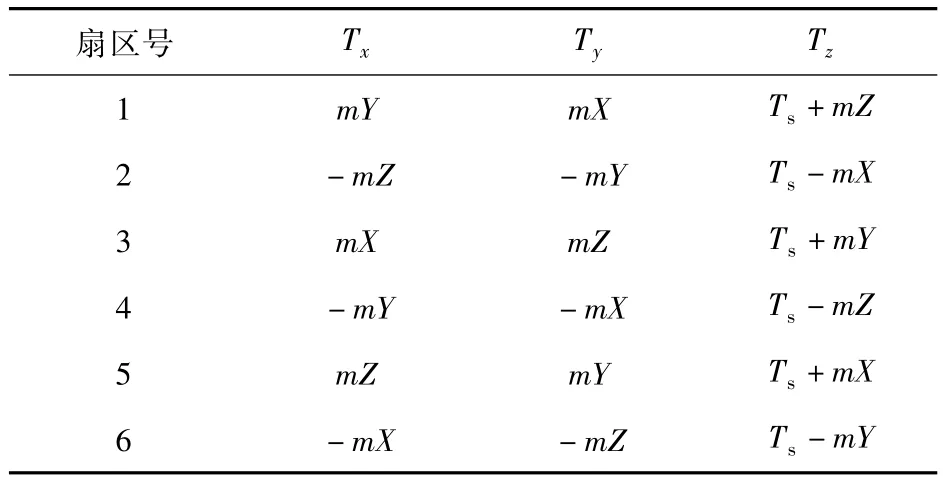
表2 各扇区的基本矢量作用时间Tab.2 Basic vector time of each sector
由以上推导可以看到,经过对X、Y、Z进行简单的四则运算,便可以判断出合成电压所处的扇区,并计算出各基本矢量的作用时间,无需经过三角函数等复杂运算,大大简化了计算的复杂程度,便于如ARM微处理器等嵌入式微处理器实现。
下面本文将探讨X、Y、Z的实际物理意义。根据电机学控制理论,任一合成电压空间矢量Vo可表示为公式(9)所示。对式(9)进行展开,可以得到Vo在αβ坐标系下的数学表达式。


从而可以得到:
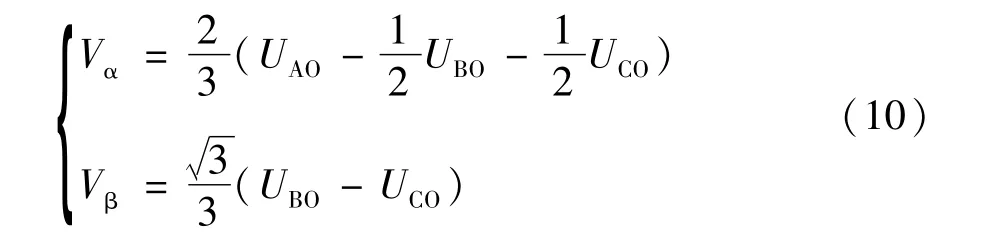
进而可以使用Vα、Vβ推导出三相线电压的表达式:
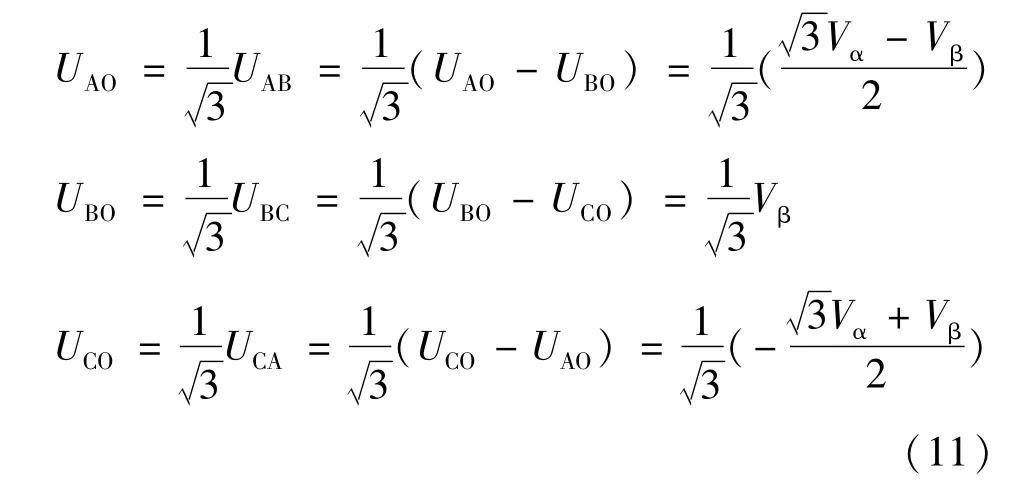
由公式(7)与公式(11)可以看到,X、Y、Z与线电压之间的本质物理联系,而且通过对线电压在各扇区的物理特性,也可以推导出表1所示的扇区分布。
3 基于STM32F407的SVPWM算法实现
在SVPWM的实际应用中,七段式对称调制算法因具有如下特点而取得了广泛的应用:
(1)每个扇区虽有多次开关状态切换,但每次切换只有一个开关动作,开关损耗较小;
(2)利用基本电压矢量直接生成波形,便于软件实现;
(3)在每个PWM波里,都以电压矢量U0开始和结束,电压矢量U7插在中间,且两个零矢量作用时间相等,可以改善电流波形,电机运行平稳。
图4描述了在各扇区下的七段式SVPWM调制输出波形。根据表2可得到各扇区下基本电压空间矢量的作用时间,从而计算出每个开关的切换点时间,再将计算得到的切换点时间数值存入相应的STM32F407的定时器比较寄存器CCR1、CCR2、CCR3中,即可实现SVPWM算法。
STM32F407是一款基于Cortex-M4F内核的高性能嵌入式ARM微处理器,它具有浮点运算处理单元,最高运行速度可达168 MHz,其片上外设资源丰富,性能强大,性价比高。该芯片具有17个片上定时器,其中定时器1和定时器8与其它定时器完全独立,且具有死区发生器、刹车控制、PWM互补输出等专用于电机控制的功能。本文将定时器1设置在PWM中央对齐模式1下,利用其3路PWM互补输出通道实现三相SVPWM输出。


图4 七段式SVPWM各扇区调制输出波形Fig.4 Modulation outputwaveform of seven-segment SVPWM in each sector
结合图4和表2,可以推导出每个开关的切换点时间,即写入定时器比较寄存器CCR1、CCR2、CCR3中的值如表3所示。
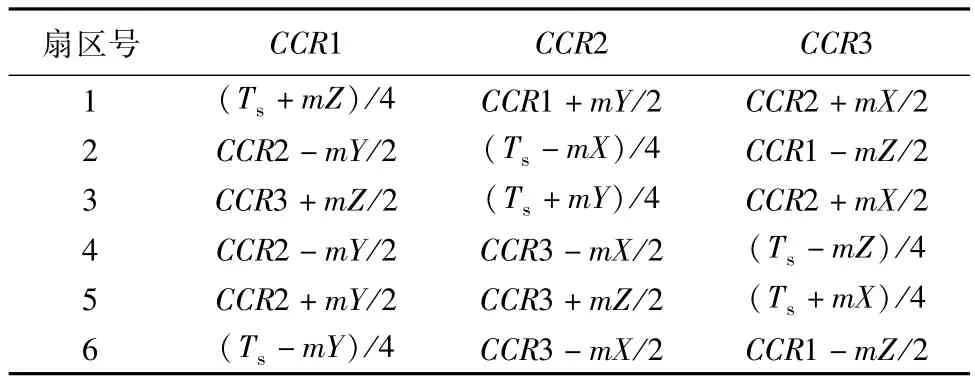
表3 各扇区的定时器值Tab.3 Register value in different sectors
4 实验
按照图1设计了基于STM32F407的永磁同步电机控制器,永磁同步电机为通润驱动的VM450,其参数如下:额定转速76转/分;额定功率1.1 kW;额定电压220 V;额定电流5.6 A;额定频率20.3 Hz;额定转矩:138 N·m;极对数32极。图5为38转/分时的电机电流波形,图6为额定转速下的电机电流波形,由于电机空载运行,因此电流较小,同时由于未加入死区补偿,因此电流波形含有谐波,有一定失真。
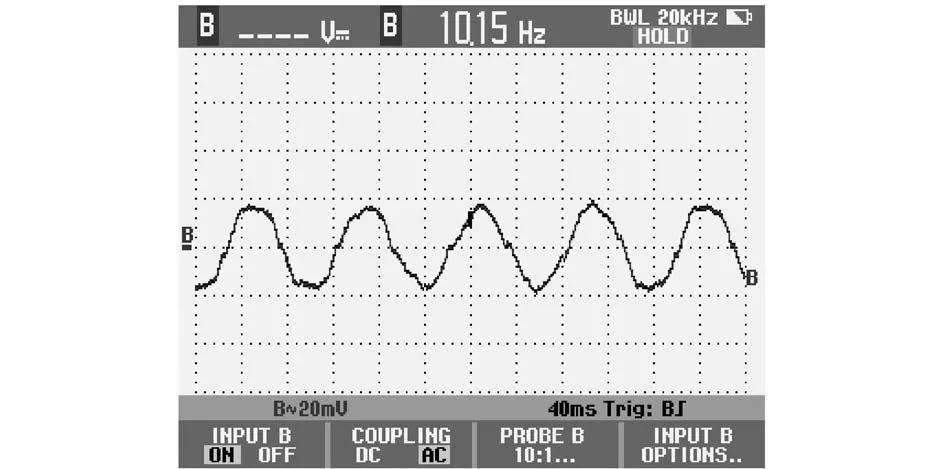
图5 永磁同步电机电流(38转/分)Fig.5 PMSM current(38round/min)
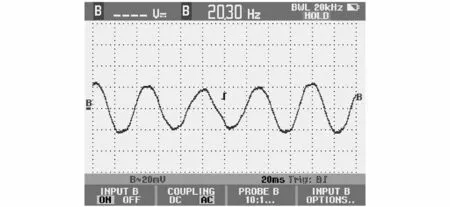
图6 永磁同步电机电流(76转/分)Fig.6 PMSM current(76round/min)
5 结束语
本文深入的分析了空间脉宽矢量调制SVPWM的基本原理及其简化算法的实现,并在STM32F407上验证了该算法的可行性,为实现FOC电机控制算法及相关SVPWM研究提供了参考。
