基于线性二次型最优控制理论MMC控制器设计*
2017-12-20宋平岗游小辉罗剑章伟林家通
宋平岗,游小辉,罗剑,章伟,林家通
(华东交通大学电气与电子工程学院,南昌330013)
0 引 言
随着小型化、分散性、远离负荷中心的太阳能、风能等可再生能源利用规模的扩大[1],传统的交流输电技术已经满足不了需求。基于IGBT、IGCT的电压源型高压直流输电(Voltage Source Converter HVDC,VSC-HVDC)以其灵活、经济、环保、高效的特点,解决了传统直流输电占地面积大、投资大、易发生换相失败等问题[2]。可以实现不需无功补偿的有功功率和无功功率独立控制,因而电压源型高压直流输电凭借着其在提高电力系统稳定性、改善电能质量等方面具有的技术优势,在风能等可再生能源发电并网、异步交流电网互联、孤岛和城市供电以及分布式发电等领域具有很强的适用性[3-7]。
电压源型高压直流输电常采用ABB公司的两电平电压源和西门子的模块化多电平换流器(modular multilevel converter,MMC)这两种拓扑结构[8-9]。相对两电平拓扑结构,模块化多电平换流器模块与模块之间串联,避免了器件均压问题。随着串联模块的增加,输出的电平数也相应的增加,输出的波形品质越高、谐波含量越低。
目前双闭环PI控制策略被广泛运用到MMCHVDC中[7]。这种控制策略建立于基于线性模型的基础上,电网谐波扰动以及等效电感变化会导致系统稳定性变差。而且双闭环PI控制策略含有多个PI控制器,PI环节的参数设计没有固定的设置方法,在实际系统中控制器的调试比较复杂,不易达到理想的效果,动态性能较差。为了解决上述问题,引入具有实现简单、动态性能好、控制目标明确等优点的线性二次调节LQR控制器[10-12]。由于采用LQR实现变流器控制,无法消除电流内环的稳定误差,因此将含积分控制的线性二次最优控制算法(LQRI)引入MMC中,实现了内环的最优控制。
本文先介绍MMC基本原理,建立了基于两相旋转坐标的MMC数学模型,进而推导了内环LQRI控制算法的实现,将载波移相调制和电容电压排序算法有机结合[13-14],在两相静止坐标系下采用文献[10]中的比例复数积分环流抑制策略[15]。最后通过 MATLAB/Simulink搭建的 MMC-HVDC系统,将LQRI控制和双闭环PI仿真结果进行对比分析。
1 MMC的原理
如图1所示为MMC简化拓扑结构,MMC含有三相单元,下标“j”=(a,b,c)表示第 j相的变量。每个相是由上下桥臂组成,其中下标p、n分别代表上、下桥臂。上下桥臂是由等效电阻和电感与N个子模块串联组成。图1的右上角为子模块的拓扑结构,D1、D2为功率二极管,T1、T2为IGBT,C为模块电容,uc为子模块电容电压,uko和iko为子模块输出电压和电流。uko是由子模块的工作状态决定的。当T1导通而T2关断时,uko=uc,子模块电容进行充放电。当T1关断而T2导通时,uko=0,子模块被旁路。usj和isj分别为交流侧的电压与电流。Rs和Ls分别为三相电网等效电阻和等效电抗。udc和idc分别为直流侧的电压与电流。由基尔霍夫电压定律,可得MMC的方程式。

图1 MMC基本拓扑结构Fig.1 Basic topology structure of MMC

上两式中的ujp和ujn分别为j相上、下桥臂的电压,ucir_jp和ucir_jn分别为上、下桥臂的电流通过桥臂等效电感L和等效电阻R所产生的电压。

将式(1)中三相坐标转化到d-q旋转坐标可得:
上式中的下标“d”、“q”为三相静止坐标系转变为两相旋转坐标系的相应变量。usd、usq分别为MMC交流侧电压在d轴、q轴的分量;isd、isq分别为三相电流在d轴、q轴的分量;ω为电网角频率。
通常情况下,MMC每相投入N个子模块,则并联在直流侧等效电容为3C/N。但是这3N个子模块电容并不是一直都会投入,而是6N个子模块轮流投入,因此并联在直流侧的等效电容为Ceq=6C/N。不考虑电感Ls能量交换和换流器损耗,直流侧动态方程可表示为:

上式中RL=udc/idc为负载等效电阻。
2 控制器的设计
2.1 外环控制器设计
定有功、无功功率控制能维持交直流两端的能量交换、换流器与交流侧的能量交换,采用PI调节控制时,定直流电压控制器的输出为内环d轴电流参考值无功功率控制器的输出为内环q轴电流参考值图2中,kp和ki为相应PI控制器的系数。为了防止过电流信号使内环的输出参考电压过大,导致实际电路中交流电流过大,在输出参考值之前,为其加了幅值为 isdmax、isdmin、isqmax和 isqmin的限幅。
2.2 内环控制器设计
LQR控制器是设计出控制增益K使二次型目标泛函J最小,以达到最优控制的目的。其中K是由性能加权矩阵Q和控制加权R决定。利用LQR控制算法,可得系统最优控制定律,使系闭环最优控制易于实现。

图2 MMC外环控制器Fig.2 Outer loop controller of MMC
由式(4)可得在d-q旋转坐标系下,内环控制的状态空间模型为:

其中状态量 x=[isdisq]T、控制量 u=[uduq]T,扰动量 v=[usdusq]T。矩阵 A、B、E代表状态、控制和扰动矩阵,分别为:
由此,可在d-q坐标系中,由模型求出系统最优控制定律u=-Kx。LQR控制的目标泛函为:

上式中Q、R分别为性能加权矩阵、控制加权矩阵,矩阵P可通过求解黎卡提(Riccati)矩阵方程求得:

通常在线性控制理论中,控制增益为:

式(8)中Q为正定对角矩阵,R为对角矩阵。通过MATLAB中的lqr函数能简单的求出上述方程。然而分析上述的推导表达式可得,纯LQR控制只能分析状态量x与控制量u的比例关系。虽然采用LQR控制的控制器有比较好的动态性能,但是还是不能消除稳态误差。为此引入控制器积分效果来消除稳态误差,采用增加状态变量的方法,由此构成LQRI控制算法。
LQRI控制算法的状态表达式为:

其中状态量 xa~=[isd~isq~∫isd~∫isq~]T、控制量ua~=[ud~uq~]T、扰动量 va~=[usd~usq~]T上式∫isd~、∫isq~为新添加的积分状态变量,积分状态变量随着时间变化而逐步增大,从而使控制器输出也随之增大,利于将稳态误差进一步缩小直至零,以达到消除稳态误差的目的。
下标“~”代表LQRI控制系统的向量值。新的状态、控制和扰动矩阵Aα、Bα、Eα分别为:

新的目标泛函为:
控制加权矩阵R为:

采用LQRI算法的MMC的控制框图如图3所示。

图3 MMC控制系统框图Fig.3 Block diagram of MMC control system
其中LQRI内部控制结构如图4所示。

图4 LQRI控制结构框图Fig.4 Block diagram of LQRI control structure
图4中的K1和K2由式(9)求出。矩阵K为两行四列,将其分为K2(2×2)代表比例系数矩阵和K1(2×2)积分系数矩阵。内环采用LQRI控制器以实现电流的最优控制,使得控制系统具有良好的动态性能。
3 仿真分析
在MATLAB/Simulink中搭建了上述的基于LQRI控制和双闭环控制的MMC-HVDC仿真系统,两换流站的参数相同。仿真参数如表1。
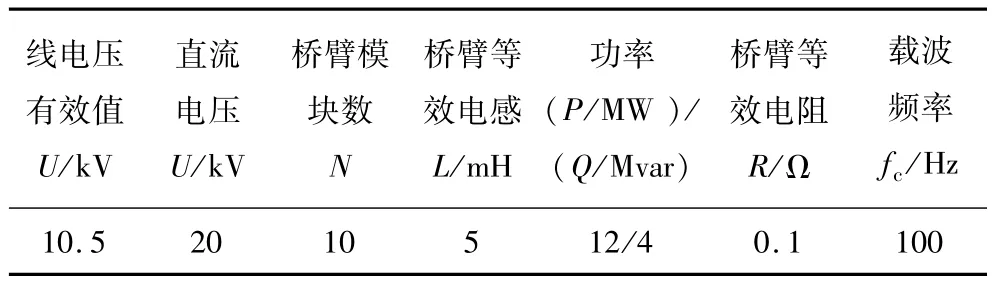
表1 仿真系统的参数Tab.1 Basic parameters of simulation system
其中加权矩阵Q、R的取值分别为:
MMC1采用定有功和定无功控制,MMC2采用定直流电压控制。分别对两种方法进行仿真。
图5为两种方法的直流电压仿真波形对比图。图5中所示为基于LQR设计的控制器仿真出来的直流电压曲线和双闭环PI控制仿真出来的直流电压曲线。从图中可以看出,进入稳态后,两种方法效果基本相同,输出直流电压都能维持在20 kV左右,然而从放大图中观察到基于LQRI设计的控制系统中实际的直流电压在参考电压附近的波动更小,直流电压的误差更小,LQRI控制系统具有更高的精确度。在进入稳态前,从放大图中通过比较可以看出,基于LQRI设计的控制器的动态响应与传统的双闭环PI控制相比,超调更小、响应更快。

图5 直流电压仿真波形对比Fig.5 DC voltage simulation waveform comparison
图6为参考电压在0.2 s由20 kV跳变至35 kV的直流电压对比图。从图中可以看出,在参考电压发生突变后,两种方法的直流电压都能较快的达到幅值为35 kV的稳定状态,然而在动态过程中,从放大图中可以看出,基于LQRI设计控制器动态响应与双闭环PI控制器相比,动态响应更快,稳定性更好,抗干扰性更强。
分别对两种控制方法的交流侧的三相交流侧A相相电流进行频谱分析,可得其三相交流侧A相电流的频谱如图7所示。

图6 参考电压跳变直流电压波形对比Fig.6 DC voltage waveform comparison of reference voltage step
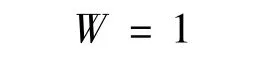
图7 A相电流频谱Fig.7 A phase current spectrum
从图7中可以看出,采用PI控制和LQRI控制的电网三相交流侧的THD分别为1.3%和0.76%,且采用LQRI法的A相电流谐波含量更低。由此,LQRI控制的MMC-HVDC对电网三相交流电流的畸变影响比传统的双闭环PI控制低。验证了基于LQRI控制的MMC-HVDC的可行性与优越性。
4 结束语
从MMC的基本原理开始,推导出基于d-q同步坐标下的MMC数学模型,提出了用于MMC-HVDC系统的LQRI控制算法,推导了控制器的设计过程。仿真实验表明,LQRI控制算法使得控制参数设计简单,稳态性能良好,电流畸变率低。
