一种新型PWM整流器间接电流控制策略及其有源阻尼方法
2017-12-20李景灏尹忠东王超王铁胜
李景灏,尹忠东,王超,王铁胜
(华北电力大学新能源电力系统国家重点实验室,北京102206)
0 引 言
三相电压型PWM整流器(VSR)可实现网侧电流正弦化、高功率因数控制以及能量双向流动,因此得到越来越广泛的应用,如静止无功发生器(STATCOM)、有源电力滤波器(APF)、新能源并网发电、交流变频调速控制等[1-3]。按电流控制方法划分,电压型PWM整流器的控制策略可分为直接电流控制和间接电流控制。直接电流控制通常采用电压、电流双闭环控制,具有快速电流响应能力,控制品质好,但这种方法至少需要两个高精度的交流电流传感器,增加了系统的体积和成本,且降低了系统可靠性。间接电流控制通常指幅相控制,该方法无需交流电流传感器,根据稳态电压平衡关系,通过控制VSR交流侧电压间接控制交流侧电流。这种控制方法虽然有较好的稳态性能,但其电流完全按自然响应特性从一个稳态过渡到另一个稳态,响应速度慢,且动态过程中存在直流偏移和很大的电流过冲。
由于幅相控制存在电流响应性能差的缺陷,不断有文献提出改进的间接电流控制方法。文献[4]提出了一种基于动态解耦的串联补偿间接电流控制方案,该方案利用串联补偿器提供的零点抵消系统电感产生的滞后极点,改善了系统动态性能。文献[5-6]提出了一种基于直流侧电流传感器的控制方案,该方案根据不同电压矢量下交流侧电流与直流电流的对应关系,基于直流侧电流对交流侧电流进行重构,实现了无交流电流传感器控制。文献[7-8]提出了基于电流观测器的间接电流控制方法,这种方法依据PWM整流器的高频数学模型,通过对电网电压、开关函数和直流侧电压实时检测得到交流侧电流状态观测值,实现间接电流控制。其中,文献[7]采用滞环方法实现电流控制,这种方案的主要不足在于开关频率随电流变化率变化而波动,造成网侧滤波电感设计困难;文献[8]采用的控制结构类似于传统的双闭环有功、无功解耦控制,只是电流采用观测值作为反馈量,这种方案需引入解耦补偿项,控制结构比较复杂。
本文提出一种新型PWM整流器间接电流控制策略。该方法包含电压外环和电流内环,其中电流内环采用电流观测器获取电流反馈量,无需使用交流电流传感器。与现有方法区别在于,本文提出的电流环只包含有功电流反馈控制,是一种单输入单输出结构。稳态时,由于电压矢量关系的约束,系统无功电流自然为零。对所提方法的电流响应性能进行深入分析,引入有源阻尼策略[9-11],将电流观测器得到的交流电流观测值作为状态反馈量加入控制指令,使电流响应性能得到很大改善。仿真结果表明,本文提出的间接电流控制方法具有很好的稳态、动态性能。该方案成本低,结构简单,参数设计容易,是一种新颖的PWM整流器控制策略。
1 PWM整流器数学模型
三相电压型PWM整流器拓扑如图1所示。

图1 三相电压型PWM整流器拓扑Fig.1 Topology of the three-phase PWM rectifier
在同步旋转d-q坐标系下,三相PWM整流器的数学模型为

式中 eq、ed为电网电压的 q、d轴分量;uq、ud为整流器交流侧电压的q、d轴分量;iq、id为电网电流的q、d轴分量;ω为电网角频率;R、L分别为交流侧电阻、电感。
三相PWM整流器功率计算公式为:

若将电网电压定向于q轴,有:则功率计算公式可简化为:


由式(4)可看出,基于电网电压定向方法,只要控制iq、id就可实现对有功、无功功率的独立控制。
2 新型PWM整流器间接电流控制策略
2.1 控制策略原理
三相PWM整流器稳态矢量图如图2所示。

图2 PWM整流器稳态矢量图Fig.2 Steady-state vector diagram of PWM rectifier
图2中,U为三相VSR交流侧基波电压矢量,UL为电感基波电压矢量,I为交流侧电流矢量,E为电网电压矢量。矢量I与E的夹角为φ,E定向于q轴。根据基尔霍夫电压定律,有:

将式(5)的矢量方程写成dq坐标系下的复数形式,有:

由式(6)可知,若将Em定向于q轴,则系统以单位功率因数运行于稳态时,总有:

式中Em、R均为已知量。用有功电流给定值替换式(7)中的Im,可得uq控制方程:

当系统不发生过调制时,实际的整流器交流侧电压为:

式中GP为变流器增益,该增益为直流侧电压与SVPWM模块设定的基准电压之比,即通常设基准电压为额定直流电压。
对于有功电流iq,则引入电流观测值iqest实现反馈控制。为分析方便,这里认为电流观测值与实际值严格相等,即iq=iqest。令d轴控制电压方程为:

考虑变流器增益时,有:

将式(9)、(11)给出的控制方程代入式(1),并考虑式(3),有:

在分析电流环动态特性时,为突出问题,可暂不考虑直流侧电压变化对输入电流的影响,即认为直流侧电压为常数,GP也为常数[4]。
对式(12)方程组,消去无功电流id,整理后可得iq与间的传递函数:

由劳斯稳定判据,可得电流内环闭环稳定的条件为:

只要控制器参数满足式(14)给出的稳定条件,就能保证电流环稳定,实现有功电流iq对的无差跟踪。
2.2 电流环动态性能分析
由式(13)可看出,采用本文提出的控制策略时,电流环是一个三阶系统。对于采用双闭环控制的PWM整流器,电流内环响应速度必须足够快,否则无法取得良好的电压控制效果。为此,有必要对电流环的动态性能进行深入分析。
通过研究闭环系统的根轨迹,可以简单方便地对系统不同给定参数下的动态性能进行定性分析[11]。式(13)给出的闭环传递函数对应的闭环特征方程为:

令 L=10 mH,R=0.2Ω,ω=100π,GP=1,以KP、KI为可变参数,绘制广义根轨迹。
以KP为可变参数时,将式(15)变换为:

式(16)就是以KP为可变参数时的根轨迹方程,取KI为不同值时,可得到KP和KI均可变化的根轨迹簇,如图3所示。其中,KP从零变化至无穷,KI依次取值为 20、50、100、150、200。

图3 电流环广义根轨迹(R=0.2Ω)Fig.3 Generalized root lociof current loop(R=0.2Ω)
由图3可看出,在给定系统参数下,电流环包含一个实数极点和一对共轭复数极点。当KI较大时,存在位于s右半平面的极点,此时电流环不稳定。在稳定区域内,无论KP、KI参数如何变化,复数极点至实轴的距离均远大于其至虚轴的距离,这意味着对应的阻尼角接近90°,系统阻尼比几乎为0。由于阻尼比太小,电流超调量非常大,峰值电流几乎为稳态电流的两倍,暂态过程振荡剧烈,动态性能非常差。这种情况下,电压环根本无法稳定工作。要改善电流环动态响应性能,就必须提高系统阻尼比。分别取R=1Ω,5Ω,其余参数不变,重新绘制广义根轨迹,如图4所示。
由图4可看出,增大交流侧电阻至2Ω时,复数极点对应的阻尼比有所增加,电流响应性能得到改善;增大交流侧电阻至5Ω时,通过调节KP、KI参数,可将阻尼比调整至0.707左右,使电流环响应特性得到明显改善。由于共轭极点离虚轴很远,对应的响应分量衰减很快,电流环动态响应主要由实数极点对应的响应分量决定,大致呈一阶系统响应特性。由以上分析可知,只要在交流侧串联电阻提高系统阻尼比,就能显著改善电流环动态响应特性,但这样会造成系统损耗显著增加。
2.3 有源阻尼方法
为了解决电流环响应性能差的问题,本文提出一种有源阻尼方法,在不增加交流侧电阻的情况下提高系统阻尼比,改善电流环动态响应特性。
基于式,考虑引入d iq/d t、iq作为状态反馈量,实现电流环极点的重新配置。令:

式中k1、k2为状态反馈系数。
考虑式(3),将式(9)、(11)、(17)代入式(1),整理后得iq与间的传递函数为:
由式(18)可以得到电流环对应的闭环特征方程,以KP为可变参数,得到的根轨迹方程为:

取 k1=-0.02,k2=-3,R=0.2Ω,其余参数与前文相同。令KI=100,得到以KP为可变参数的根轨迹,如图5所示。
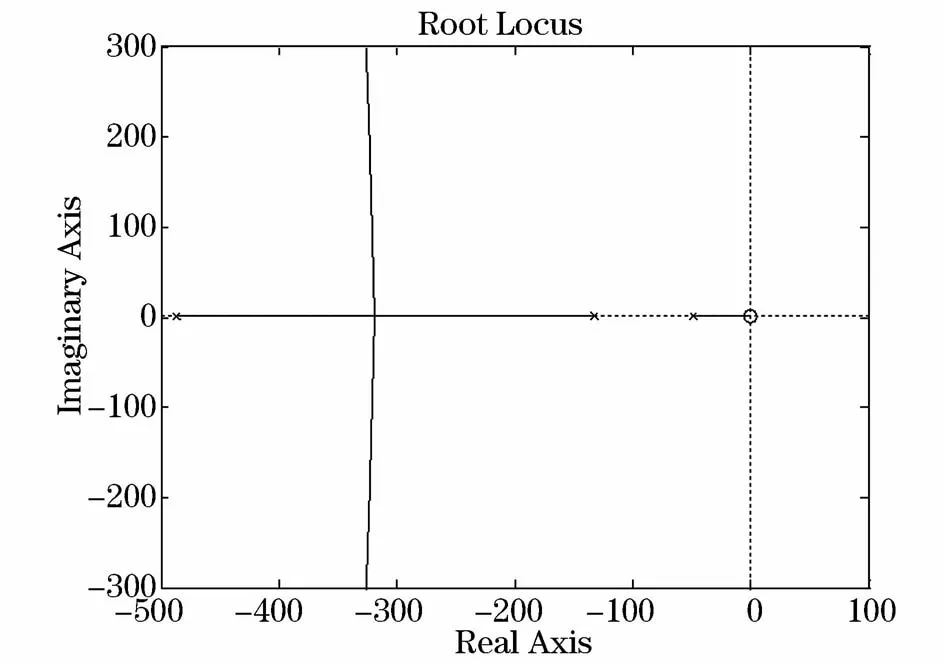
图5 引入有源阻尼后的广义根轨迹Fig.5 Generalized root lociwith active damping strategy introduced
由图5可看出,在不同的KP参数下,电流环极点在s左半平面可能具有两种分布模式:即包含一对共轭复数极点和一个实数极点,或包含三个实数极点。通过调节KP参数,可使共轭复数极点的阻尼比在0.707左右,并使实数极点获得较高的衰减系数。由此可知,采用有源阻尼方法,可在不增加系统额外损耗的情况下,显著改善电流环响应性能。
对于diq/dt的获取,如果直接将iq作微分运算,会引入高频噪声。考虑式,有:

由式(20)可看出,id中包含了 diq/dt和 iq的线性组合,可采用id代替diq/dt作为状态反馈量。对id、iq的获取,采用基于PWM整流器高频数学模型的电流观测器实现,电流观测器具体结构可参考文献[8]。
综合上述分析,本文提出的新型PWM整流器间接电流控制方法具有如下结构框图。
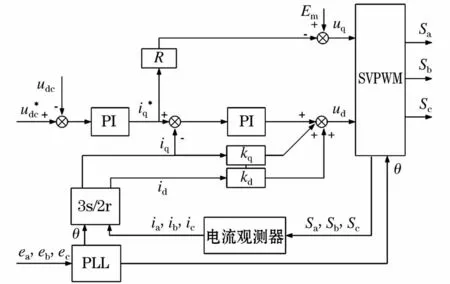
图6 新型PWM整流器控制策略结构框图Fig.6 Blockdiagramofnewcontrol strategyforPWMrectifier
图6中,kd、kq分别为 id、iq对应的状态反馈系数。
2.4 整流器增益对电流环性能的影响分析
以上分析均认为GP=1,然而,在系统动态过程中,直流侧电压是变化的,相应地,GP值也会发生变化。考虑式(18)对应的闭环特征方程,以GP为可变参数,得到的根轨迹方程为:

取 KP=1,KI=50,k1=-0.02,k2=-3,R=0.2 Ω,其余参数与前文相同,绘制根轨迹如图7所示。

图7 电流环广义根轨迹(以GP为可变参数)Fig.7 Generalizedrootlociofcurrentloop(usingGPasavariableparameter)
由图7可看出,当GP值很小时,系统包含一对共轭复数极点和一个实数极点,共轭复数极点与虚轴距离较近,且阻尼比很低,相应的电流环响应性能很差。这种情况通常只存在于系统初启动时的短暂过程中,因此实际影响很小。当GP在1左右时,共轭复数极点对应的阻尼比在0.7左右,距离虚轴较远,对电流环动态性能影响很小,此时实数极点为系统主导极点。随着GP值的增大,共轭复数极点发展为两个实数极点,其转折处对应的GP值在1.5左右,此时对应的直流侧电压很高,实际系统中一般不会出现。
3 仿真分析
基于本文提出的PWM整流器间接电流控制方法,搭建MATLAB/Simulink仿真模型。主要仿真参数为:输入相电压E=220V,f=50Hz,交流侧电感L=10mH,电阻 R=0.2Ω,直流侧额定电压 Udc=700 V,电容C=1500μF,开关频率f=2000Hz。电流观测器的系统参数取 L=10.5mH,R=0.19Ω,这是为了模拟对系统参数的估算偏差。状态反馈系数为:kd=0.02,kq=-2。仿真工况设定为:t=0.5s时,负载电阻RL从50Ω变为25Ω。
3.1 系统运行结果与分析
直流侧输出电压波形如图8所示,交流侧有功、无功电流波形如图9所示。
由图8可看出,基于本文提出的间接电流控制方法,可以实现直流侧电压的快速、稳定控制,稳态时电压波动在0.1%以内。当发生负载扰动时,电压能快速恢复至给定值。由图9(a)、图9(b)可看出,基于本文提出的控制策略,可实现有功、无功电流的快速稳定控制,电流环的稳态、动态性能均较好。

图8 直流侧电压仿真结果Fig.8 Simulation result of DC voltage

图9 交流侧电流仿真结果Fig.9 Simulation result of AC currents
3.2 有源阻尼仿真分析
为了验证前述有源阻尼方法的正确性,断开电压外环,并在直流侧接入直流700 V恒压源。仿真工况设定为:t=0.1 s时,电流环给定由0 A阶跃至20 A。比较引入有源阻尼前后的电流环响应特性。仿真结果如图10所示。
由图10可看出,引入有源阻尼前,有功电流在暂态过程中振荡剧烈,动态性能非常差,调整时间长。引入有源阻尼后,有功电流在暂态过程中没有振荡,响应迅速,动态性能较好。这进一步验证了本文提出的有源阻尼方法的正确性。需要指出的是,有功电流稳态值和给定值略有偏差,这是由于仿真时考虑了电流观测器存在的模型参数误差。
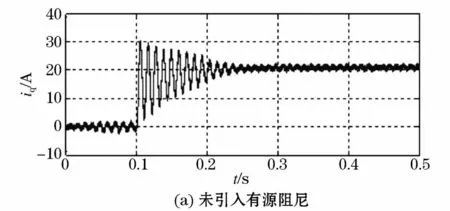

图10 电流动态响应仿真结果Fig.10 Simulation results of current dynamic response
4 结束语
文章提出一种新型PWM整流器间接电流控制策略。该方法包含电压外环和电流内环,其中电流内环采用电流观测器获取反馈量。与传统方案区别在于,本文方案的电流内环只包含有功电流反馈控制,对无功电流则由稳态电压矢量关系生成控制量,使其稳态时自然为零,简化了控制结构;引入了有源阻尼策略对系统零极点重新配置,使电流环响应性能得到很大改善。仿真结果表明,本文提出的方案具有很好的稳态、动态性能。该方案硬件成本低,动态性能高,结构简单,参数设计容易,是一种新颖的PWM整流器控制方案。
