提高弱电网中光伏并网逆变器稳定性的控制方法*
2017-12-20孙如田郑松
孙如田,郑松
(1.克拉玛依职业技术学院,新疆独山子833600;2.杭州电子科技大学,杭州310018)
0 引 言
随着传统化石能源的大量消耗以及环境问题的恶化,近年来以风光为代表的新能源倍受人们的青睐,大量的分布式电源接入电网之中[1-2]。随着电网中新能源渗透率的增大,电网越来越表现出弱电网的特性[2-3]。弱电网中电网阻抗的变化会导致系统稳定裕度降低,使系统进入不稳定运行状态,尤其是对于多逆变器并联系统,可能导致逆变器之间的不稳定现象,威胁着系统的安全稳定运行[4-5]。
目前已有部分文献提出了增强弱电网中并网逆变器稳定性的方法,文献[3]采用虚拟阻抗技术对逆变器输出阻抗进行改善,进而提高并网逆变器对电网阻抗变化的适应性,但该方法在实现过程中需要引入微分环节,工程实际中不能实现;文献[6]针对多逆变器并网系统提出在并网点添加一个阻性有源滤波器来增强系统的稳定性,但该方法需要额外添加硬件设备,提高了成本。文献[7]采用零补偿的控制策略来提高系统的相位裕度,但当电网阻抗大范围变化时,该方法的效果较差;文献[8]采用在滤波电感L1和电容C支路串联或者并联虚拟电阻的方法来改善逆变器的等效输出阻抗,但该方法在改变输出阻抗的同时也改变了电流环的性能。
基于上述分析,本文首先分析了电网阻抗变化对系统无源阻尼比及稳定性能的影响,然后提出一种变增益控制策略来对系统的相位进行实时补偿,进而提高系统的稳定性,增强系统对电网的适应能力。最后通过仿真验证了本文理论分析的正确性。
1 电网中并网逆变器稳定性分析
1.1 并网逆变器等效模型
图1为一种常见的并网逆变器控制结构,其中icabc、isabc、upabc分别为滤波器三相电容电流、三相并网电流及三相并网点电压。Zg为电网阻抗,主要包括电阻和电抗,系统的稳定性问题由感性分量引起[9-10],因此本文只考虑感性分量,记 Zg(s)=sLg。由于在三相静止坐标系下无法实现有功和无功的解耦控制,因此将系统转换到两相静止坐标系下进行控制,kc为电容电流有源阻尼系数。
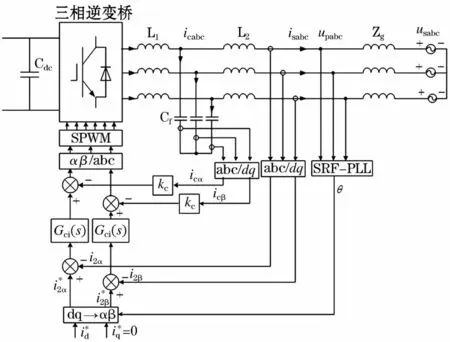
图1 三相并网逆变器及其控制结构Fig.1 Control strategy of the grid-connected inverter in two-phase stationary coordinate system
采用对正弦交流能够实现无静差跟踪的准PR控制器来控制并网电流,其数学模型如式(1)所示[9]。

工程实际应用中,电网阻抗可以认为是滤波电感L2的一部分。因此可以得到系统在复频域下的等效控制结构如图2所示(仅以a轴为例进行分析)。忽略系统扰动usa(s),则可以得到参考电流到输出并网电流的开环传递函数如式(2)所示。

图2 系统控制结构模型Fig.2 Control configuration model of the system

式中 Leq=L2+Lg
1.2 电网阻抗对系统稳定性的影响
为了抑制高频谐波,系统的开环截止频率ωc一般设置得远小于开关频率ωs,而滤波电容对系统低频特性的影响较小,因此在ωc处可以忽略滤波电容的影响,将jωc带入式(2)得到系统开环传递函数在截止频率处的幅值:

对于准PR控制器,虽然在极点频率ω0处能够获得很大的幅值增益,但在该频率处系统的相频曲线穿越0°线,对系统相位造成了-180°的相移。为了减小控制器对系统相位裕度的影响,通常将ωc设计得远大于ω0。故在ωc处可以将准PR控制器近似简化为:

将 Gc(jωc)代入式(3),由开环传递函数在截止频率处的幅值为1得到:

由式(5)可以解得 ωc,然后将 jωc代入式(1)可得准PR控制器在ωc处的相角:

根据式(2)得到不考虑准PR控制器时电流开环传递函数在截止频率ωc处的相角:
因此可以得到系统的相位裕度为[7]:

以表1中所示的逆变器参数为例,根据式(6)可以得到系统相位裕度随电网阻抗变化的曲线如图3所示。可以看出随着电网的增加,系统相位裕度减小。当电网增加到一定值时,系统相位减小至零。当电网阻抗继续增大时,相位进一步减小为负值,系统出现不稳定现象。

表1 系统参数Tab.1 System parameters

图3 系统相位裕度随电网阻抗变化曲线Fig.3 Curve of phasemargin with grid impedance variation
2 提高弱电网中并网逆变器稳定性的控制方法
上述分析表明弱电网中电网阻抗的变化会使系统的相位裕度降低,导致系统进入不稳定状态。如果能够在电网阻抗变化的过程中维持系统具有足够的相位裕度,则可以保证系统具有足够的稳定裕度,进而可以避免不稳定现象的发生。因此本文提出一种变增益的控制方法来实时补偿系统的相位裕度,进而增强系统的稳定性。
首先采用如式(7)所示的环节对系统的开环相位进行补偿,其能够对特定频率处的相位进行补偿,且对系统开环增益几乎无影响[2,11]。

式中k1、k2和k3均为系统的调节参数,可以通过调节这两个参数来改变系统的相位及幅值。
采用所提环节补偿后的电流环控制器为:

系统相位曲线变化情况如图4所示,可以看出随着电网阻抗的增加,系统相位趋于恒定。

图4 开环传递函数相位曲线Fig.4 Phase curve of open loop transfer function
由图4可以看出,经式(7)所示环节补偿后每一个电网阻抗值所对应的系统开环相位曲线在基波频率ω0至相位交界频率ωg范围内均存在一个峰值。如果通过调节系统增益的方法使得开环截止频率始终在上述相位峰值所对应的频率点ωp处取得,则系统将始终具有足够的相位裕度。根据运行条件对比例系数k1进行实时调整,进而使系统的相位裕度达到最大值。系统的可变增益控制结构如图5所示。

图5 变增益控制结构框图Fig.5 Block diagram of gain-scheduling control configuration of the system
3 径向基函数(Radial Basis Function,RBF)神经网络
径向基函数神经元网络是一种前向网络,其拓扑结构如图6所示。这种网络完成如式(8)所示的非线性映射[12]:

式中 X∈Rn是输入矢量;ψ(·)是一个R+→R的函数;||·||是欧氏范数;Wi是权值;ci是 RBF网络的数据中心;nr是中心数目。ψ(·)取径向基函数主要基于如下原理。

图6 RBF神经网络结构Fig.6 Structure of the RBF neural network
如果前向学习集合为 S={(Xi,ti)∈Rn×R|i=1…N},ψ(·,W)是未知函数,W是待学习的权值,那么神经网络学习过程就是寻找ψ(·,W)及W使式(9)中的能量函数取最小值:

式中||·||是函数空间上的 L2范数,约束算子 P(·)应当仔细选择以保证函数ψ的平滑。λ表示约束的严格程度。从正则方法出发采用变分原理可以证明ψ(·)应该取径向基函数。
容易看出,k1是关于电网阻抗Lg的非线性函数,直接根据系统模型求解该非线性函数是非常困难的,因此本文采用径向基函数(Radial Basis Function,RBF)神经网络对该非线性函数进行建模,具体步骤如下:
(1)在[0mH,5mH]内随机取一列数值作为Lg的输入值,然后根据系统模型采用数值计算的方法求取每一个电网阻抗值所对应的kx值;
(2)将步骤(1)所得的数据组分为两部分,其中一部分用来训练神经网络模型,另外一部分用来对训练好的模型进行验证。
对训练好的RBF神经网络模型进行验证的结果如图7所示,可以看出由神经网络模型的数据与实际

图7 神经网络模型输出结果Fig.7 Output result of neural network
数据几乎完全重合,因此所训练的RBF神经网络模型可以用来代替k1关于Lg的非线性函数。
3 变增益控制方法对电网阻抗的鲁棒性分析
采用变增益控制方法后系统相位裕度随电网阻抗的变化曲线如图8所示,可以看出随着电网阻抗的增加系统始终具有足够的相位裕度,满足系统稳定性的要求。图9进一步给出了不同电网阻抗情况下开环传递函数伯德图,可以看出随着电网阻抗的增加系统开环截止频率有所降低,但始终远大于基波频率,且在基波频率处始终具有足够大的幅值增益,满足跟踪性能的要求。
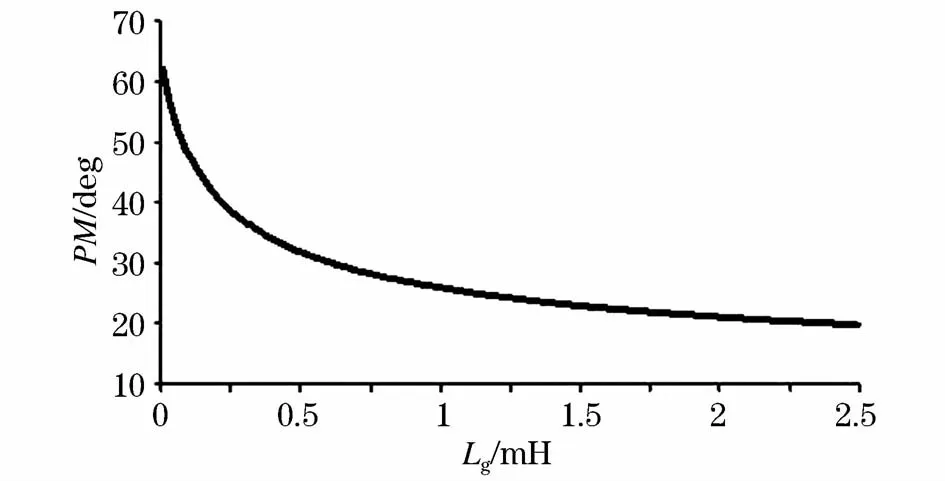
图8 采用变增益控制方法后相位裕度随电网阻抗变化曲线Fig.8 Stabilitymargin curve with grid impedance variation after adopting varying-gain control strategy

图9 采用变增益控制方法后系统开环传递函数伯德图Fig.9 Bode diagram of open loop transfer function after adopting varying-gain control strategy
4 仿真验证
为了验证理论分析的正确性,以一台额定容量为250 kW的逆变器为例进行仿真分析,仿真系统主要参数如表1所示。电网采用三相交流理想电压源模拟,电网阻抗采用集中参数电感模拟,光伏电池采用文献[13]中的数学模型搭建。
图10为原始系统相位裕度为零情况下(Lg=1.25 mH),采用本文所提可变增益控制方法前后系统仿真波形。可以看出在采用可变增益控制方法之前,由于系统相位裕度接近于零,因此系统处于临界不稳定状态,并网电流中谐波含量较大,波形畸变严重。加入本文所提控制方法后,并网点电压及并网电流波形均变好,满足并网要求,系统处于稳定运行状态。

图10 L g=1.25 mH时采用变增益控制方法前后仿真波形Fig.10 Simulation waveform before and after adopting varying-gain control strategy under 1.25 mH grid impedance
图11、图12为原始系统相位裕度为负值情况下(Lg=2 mH,Lg=3 mH),采用本文所提出的可变增益控制方法前后系统仿真波形。可以看出由于原始系统的相位裕度为负值,采用本文所提控制方法前并网电流及并网点电压均畸变严重,系统处于不稳定运行状态。当加入所提控制方法后,两种情况下系统并网电流及并网点电压均变好,谐波含量较小,满足并网要求,系统处于稳定运行状态。
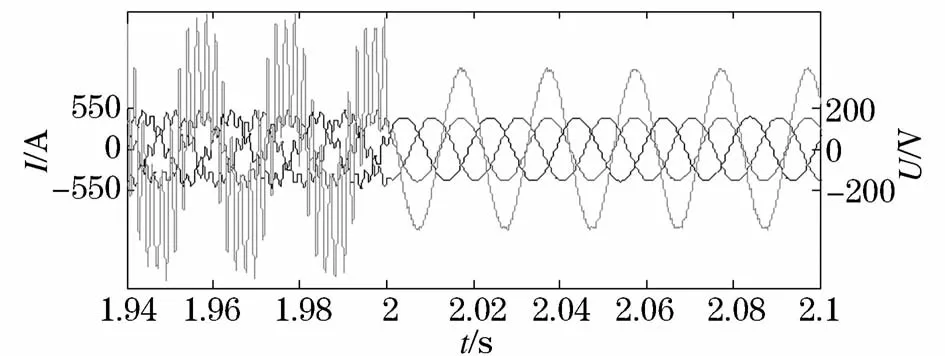
图11 L g=2 mH时采用变增益控制方法前后仿真波形Fig.11 Simulation waveform before and after adopting varying-gain control strategy under 2 mH grid impedance
综上所述:不论原始系统的相位裕度为零,还是为负值,当加入本文所提可变增益控制方法后,系统稳定裕度得到提高,并网电流及并网点电压波形良好,满足并网要求。

图12 L g=3 mH时采用变增益控制方法前后仿真波形Fig.12 Simulation waveform before and after adopting varying-gain control strategy under 3 mH grid impedance
5 结束语
文章研究了电网阻抗对并网逆变器稳定性的影响,电网阻抗的增加导致系统稳定裕度降低,从而使系统进入不稳定状态。提出了一种基于神经网络的变增益控制方法对系统相位裕度进行实时补偿,从而实现系统稳定裕度的提升。在电网阻抗变化的过程中,变增益控制方法能够始终维持系统具有足够的稳定裕度,提高了系统稳定性,增强了系统对电网阻抗变化的鲁棒性。
