断路器操动状态声音辨识的优化算法的研究
2017-12-20赵书涛李沐峰王亚潇孙会伟
赵书涛,李沐峰,王亚潇,孙会伟
(华北电力大学电气与电子工程学院,河北保定071003)
0 引 言
高压断路器在电力系统中起着至关重要的控制作用,其可靠运行是保证整个电力网连续不间断供电的基础。随着坚强智能电网的建设,对220 kV以上的断路器可靠性要求越来越高,因此更加迫切需要对断路器运行状态检测方法进行改进,科学的评价操动机构的运行状态。文献[1]提出一种“非接触式”断路器故障的声诊断方法,克服了传统接触式测量夹具安装问题。该方法基于断路器在操动过程伴随的声音信号分析,识别断路器运行的机械状态。声音信号属于非接触式测量,传感器安装方便,且信号变化的频带较宽,但由于声音的传播介质是空气,从声源到传感器的过程中容易受到外界噪声的干扰,如将其直接应用于断路器运行状态判别,易引起判断结果的不准确,因此需要对声音信号首先进行盲源分离。
由盲分离的固有特性,其分离结果具有顺序及幅值的不确定性[2]。源信号数是进行盲源分离的重要前提,通过一个声音传感器观测断路器合闸声音信号,同时环境中可能存在机械轰鸣声或人的语音声。目前,这类盲源分离方法在断路器状态识别领域还没有成熟的经验。文章旨在利用高压断路器操作过程,声音信号突然发生且随时间幅值递减的特性,经过改进势函数的盲源数估计,利用盲源分离以及信号包络特征判别出分合闸声音信号,参与断路器运行状态分析,提高了断路器的状态识别及故障诊断的准确性。
1 断路器声音信号盲源分离的处理过程
断路器运行中通过的电流会产生微小振动,同时伴随发出微弱的声音信号;当在断路器操动时,会产生极强的声音信号和振动信号。由传感器变换后,根据其时间、能量和频率特征,可用于断路器运行状态的在线识别。但声音信号中很有可能混有高强度的扰动,且实际潜在的源信号数目未知,这就需要提取信号特征进行盲源分离,恢复之后的声音信号直接影响断路器运行状态评估结果。
针对断路器声音信号及其含环境噪声扰动的特点,文章提出一种基于盲源数估计的信号盲源分离方法,如图1所示。对于现场采集的声音信号,在利用改进势函数法估算信号源数的基础上,将声音信号进行EEMD分解,利用IMF分量重构后再进行盲源分离,最后取分离得到的多个源信号的包络线,与断路器操作时声音信号波形比较,获得确定的分合闸声音信号分量,为后续的故障状态联合诊断奠定基础。

图1 断路器操动状态识别的声音信号处理过程Fig.1 Voice signal processing recognition of circuit breaker operating state
2 基于改进势函数法的源数估计
2.1 传统势函数法进行源数估计
对信号源数进行估计实际就是对信号分量聚类分析的过程。势函数估计信号源数方法由Pau Bofill等人提出[3],即假设传感器得到的观测信号个数η=2时,定义势函数为:

式中 x1(t)与 x2(t)是观测函数,at是两个观测函数的平方和的开方,α(t)代表两个观测数据形成的方向向量,∂(θ)代表基函数。
由于采集值均为数字信号,故对势函数中的变量α的取值应是离散值,假设试验中的采样点数是N,则N的取值越大代表分辨率越高,即αk=π/2N+kπ/N,其中 k=0,1,2,…N,对每个 α都计算出其对应的势函数的大小,找出势函数的极大值个数,也就是信源个数。
上述的势函数法实际上是聚类法的一种实现,它是以αk作为一个聚类中心,采样数据在αk处分布密集大时,其势函数取值也会较大。可是此方法只能用于2个观测信号,应用范围较小,而且其中极端数值对函数局部区域取值影响很大,会导致估计源数增多,结果可靠性不高。
2.2 基于高维混合函数对势函数法进行的改进
文章采用基于改进的势函数法进行源数估计。传统的势函数法只能判别2维信号空间,为了扩大可观测的信号个数范围,即需要构造出一个观测信号的高维信号空间。定义其高维混合函数为:


从势函数的理论上讲,因为信源会使势函数取值较大,所以式(3)中势函数取极大值的个数即是信号源数。可是在实际中,由于改进后的高维混合函数相较于传统势函数法提高了数据空间维度,就会在高维空间产生聚类中心的不稳定性,可能会出现局部异常极值导致判断结果增多。因此,文章引入聚类密度函数:

式中β是λζ的概率密度参数,其值需要通过相关性比较(Correlation Comparison Algorithm)进行估算[4]。使L(λ)关于各个λζ的偏导数等于0有:

解方程可得:

对上式反复迭代计算有:

式中χ是防零项,取一极小的正数,对计算结果影响可以忽略,其目的是防止分母取值为0。
由于极端数值影响,使σ(λζ)会出现超过信源个数的极值个数,但由于这些极值比正常信源的聚类中心值小很多,因此只要设定一聚类门限μ,保留满足不等式的λζ才是正常的信源产生的聚类中心,通过比较聚类门限得到的聚类中心个数就是所求的信源数。
综上所述,改进势函数法进行源数估计流程图如图2所示。
3 基于改进EEMD-FastICA的盲源分离
由上节方法确定盲源数之后,使用快速独立分量分析(FastICA)算法进行盲源分离[10]。利用 EEMD方法将原信号分解为多个IMF分量,然后将其与分离出的IMF分量组成一个新的多维信号,并且取其维数等于信源数,经过这样的处理得到的新信号满足使用FastICA算法的前提条件[7-8]。
FastICA算法是近年来在盲源分离领域应用最为普遍的一种方法。其中,采用牛顿迭代法对目标函数寻优,由于这种迭代算法的方向不一定是下降的,因此,当初始点远离极小点的时候,其收敛性未知。为了克服这个不足,文章引入拟牛顿法(DFP),改进牛顿法的搜索模式,其迭代公式如下:

图2 源数估计流程图Fig.2 Flow chart of source number estimation

式中 x(k)表示观测函数;p(k)表示搜索方向;λk表示搜索步长;▽f(x(k))表示求取函数梯度;H(x)称为海塞(Hesse)矩阵,其初始值 H(0)选取单位矩阵 E,通过循环迭代可以实现目标函数的最优化求解。
基于改进EEMD-FastICA的盲源分离算法主要步骤如下:
(1)源数估计。对采集到的断路器声音信号,运用改进的势函数法估计信号源的个数;
(2)对观测信号x(t)进行改进EEMD分解,得到IMF分量 ximf=(h1,h2,…,hn,rn);
(3)合成新的多维信号。将各IMF组合成为新的多维信号xIMF,并使其维数等于估计的源信号数。
(4)盲信号分离。针对新的多维信号,应用改进FastICA算法,采用DFP算法实现盲源分离,得到分离后的源信号y。
4 盲源分离实验结果分析
在实验室中模拟实际复杂噪声环境,断路器型号为ZN65-12,声音信号均采用工业拾音器以及NIPXIe-4492数字采集卡得到。分别在断路器正常合闸与发生故障合闸两种情况下,采集多个声源同时发声时的混合声音信号,两混合信号波形如图3所示。

图3 混合信号的时域波形图Fig.3 Time-domain waveform ofmixed signals
(1)源信号数的估计。观测混合声音信号共44 100个数据点,分别用改进势函数法进行源数估计:
已知观测函数只有一项x1(t),取聚类中心矢量λ=5,防零项χ=10-8,迭代精度ε=0.000 1与聚类门限μ=0.5。计算聚类密度函数偏导数为0时,两种情况的混合信号均找到5个极值点,如表1、表2所示。

表1 正常状态下高维混合函数所有极值点Tab.1 All extreme points ofmultidimensionalmixed signals in the normal state

表2 故障状态下高维混合函数所有极值点Tab.2 All extreme points ofmultidimensionalmixed signals under fault conditions
通过与聚类门限μ对比可知,在第一种情况下,只有 L(λ1)、L(λ4)、L(λ5)三项满足,且其余两项的比值运算结果与聚类门限差别极大,可以判定所求聚类中心个数为3,即信源数估计值取3;在第二种情况下,有 L(λ1)、L(λ2)、L(λ4)三项满足0.5,且其余两项的比值运算结果与聚类门限差别极大,可以判定所求聚类中心个数为3,即信源数估计值取3;两种情况均与预先设置的信源数相符。
(2)信号分解。将混合信号用改进的EEMD进行分解,为准确反映现场环境,实验中加入强度为原信号标准差0.1倍的白噪声,分解结果如图4、图5所示。


图4 正常状态混合信号EEMD分解结果Fig.4 Normalmixed signals EEMD decomposition results
(3)信号重构及分离。根据(1)的估计结果,两个混合信号均是由三个原始信号组成,所以取前三个IMF分量重组成一个新的多维信号xIMF(t)。然后运用FastICA算法进行盲源分离,结果如图6、图7所示。分解后得到的信号变化趋势与原信号基本一致,可用于断路器机械状态的识别。


图5 故障状态混合信号EEMD分解结果Fig.5 Fault statusmixed signals EEMD decomposition results

图6 正常状态声信号分离后的结果Fig.6 Results of separating normal acoustic signal

图7 故障状态声信号分离后的结果Fig.7 Results of separating fault status mixed signals
(4)利用包络特征判别合闸信号的运行状态。事先在安静环境中单独采集断路器合闸声音,分析其包络线特征,如图8所示。断路器合闸声音信号存在“瞬间发生、波峰递减、不重复”的特点。
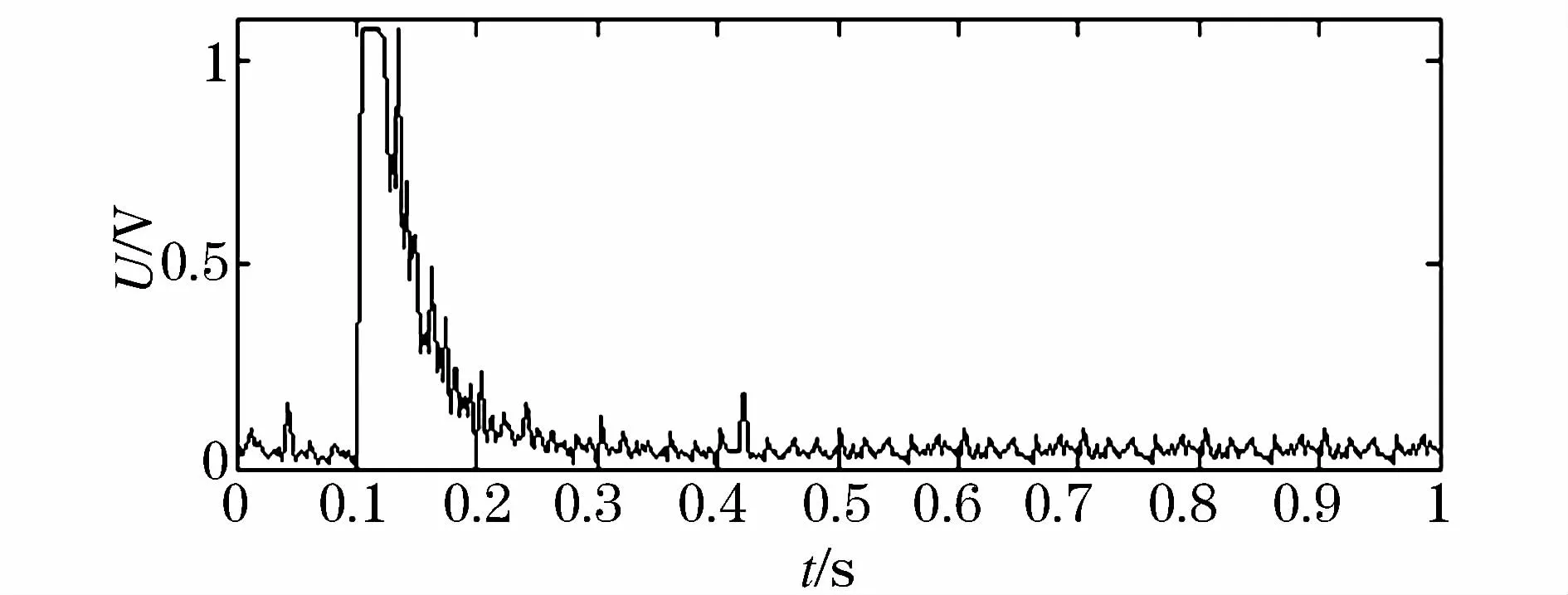
图8 安静环境中合闸声音信号上包络线Fig.8 Envelope of closing sound signal in a quiet environment
据此特点对比图6中盲分离出的三个信号,可以看出:第二个信号不断重复,第三个信号不满足“波峰递减”的特征。解混后的第一个信号波形与在单独断路器合闸声音包络线波形最接近,虽然采样起始时间差异导致波峰位置不同,但该信号满足包络线包含所有信号特征,与断路器合闸时间长度相符,因此可以确定此为断路器正常合闸声音信号分量。
而在图7中,经过盲分离的三个信号,同样可以看出:解混后的第三个信号波形与在单独断路器合闸声音包络线波形最接近,可以确定此为断路器合闸声音信号分量。但是,其合闸声信号不符合“不重复”特点,产生了两个波峰,可以推测这是由于三相合闸不同期,导致产生了不在同一时间的两次触头撞击声音,由此判定断路器的故障状态。
5 结束语
辨识断路器操动过程状态是其故障诊断的关键,基于“非接触式”的声信号分析,是评价断路器分合闸正常与否的一种有效方法。文章提出改进的势函数法计算聚类中心数,可准确地估计出未知混合观测信号的源个数。将观测信号EEMD分解后组成多维信号分量,拟牛顿法无需二阶导数信息,比传统的牛顿法进行FastICA更快捷,且初值对收敛性的影响更小。将观测信号盲源分离后,比对单独合闸信号包络线特征可获得辨识断路器操作状态的声音信号,解决了原本盲源分离信号顺序不确定的问题。在提取复杂测试环境中的断路器操作声音信号的基础上,再集图像、振动和电信号分析为一体进行多信息、特征融合,可为断路器在线机械状态辨识和故障趋势预测奠定基础。
