植保无人机飞行参数对施药雾滴沉积分布特性的影响
2017-12-20王昌陵宋坚利何雄奎王志翀王士林蒙艳华
王昌陵,宋坚利,何雄奎※,王志翀,王士林,蒙艳华
植保无人机飞行参数对施药雾滴沉积分布特性的影响
王昌陵1,宋坚利1,何雄奎1※,王志翀1,王士林1,蒙艳华2
(1. 中国农业大学理学院,北京 100193;2. 安阳全丰航空植保科技有限公司,安阳 455001)
为探究植保无人机喷雾田间雾滴沉积分布特性和飞行参数及参数精准度对沉积分布影响,该文采用高精度北斗卫星定位系统获取无人机精准飞行参数,以柠檬黄示踪剂水溶液代替农药对4种典型国产植保无人机进行了小麦田间喷雾试验,并将其中2种单旋翼无人机的飞行参数与其变异系数、均方根误差相结合,对雾滴沉积分布特性的影响因素进行了研究。结果表明:4种无人机施药在航线两端区域内沉积量变化剧烈,航线中间区域沉积量较稳定;影响横向雾滴沉积分布主要因素是无人机相邻喷头或喷幅间的雾滴重合度;对于单旋翼无人机,在高度1.1~1.2 m、速度4.2~4.9 m/s的范围内,沉积量与速度均方根误差呈极显著线性正相关关系(<0.01,=0.952),纵向沉积量变异系数与速度变异系数呈极显著线性正相关关系(<0.01,=0.963),总体沉积量变异系数与高度呈显著线性负相关关系(<0.01,=–0.888);使用速度均方根误差、速度变异系数和高度这3个飞行参数和参数精准度指标来分析和预测雾滴沉积量和分布均匀性的方法合理、有效、可行。根据试验结果,该文给出了相关合理建议以改善植保无人机施药效果,研究结果可为植保无人机田间喷雾作业参数确定、作业条件的选择和田间作业规范的制定提供参考。
无人机;农药;喷雾;雾滴;飞行参数;沉积;分布均匀性
0 引 言
当前,中国等世界很多国家都面临着人口老龄化和人口缩减的严峻形势,农业劳动力短缺的趋势在不久的将来会愈发明显[1]。为了保障中国农业的稳定和可持续发展,加快实现农业机械化已经成为中国国家层面的一项发展战略[2-3]。无人机(unmanned aerial vehicle,UAV)航空施药技术的出现和蓬勃发展正切合当前中国现代农业的发展要求,植保无人机航空施药作业效率高,突击能力强;田间地头即可起降,机动灵活,不受地形和作物长势的限制,适用于水田、丘陵、山地等地面机械难以下田作业的情况;采用低量或超低量喷雾,可降低农药使用量[4-10]。
但是,在植保无人机产业近年来快速发展并呈现井喷趋势的同时,一些厂家和飞防服务组织为了片面追求利益和效率,在作业过程中采用不合理的飞行参数,距作物冠层飞行高度大于5 m、飞行速度大于6 m/s的情况时有发生,这不仅会造成作业区施药效果差、病虫害不能得到有效控制,还会在非靶标区域产生作物药害和环境污染,大大降低农药利用率[11-14]。因此,植保无人机施药作业的合理飞行参数的选择和标准作业规范的制定对整个行业的发展都至关重要。
一段时间以来,研究人员已经利用多种方法对无人机飞行参数(速度、高度)与喷雾质量、沉积分布和施药效果的关系进行了探索。邱白晶等[15]采用二因素三水平试验方法探究了无人直升机喷雾沉积浓度、均匀性与飞行高度、速度及两因素间的交互作用的关系。秦维彩等[16-17]在玉米生长后期利用N-3型无人机研究了喷洒参数对玉米冠层雾滴沉积分布的影响。王昌陵等[18-19]提出了一种植保无人机施药雾滴空间质量平衡测试法,基于该方法研究了3WQF80-10型无人机在不同飞行方式、高度和侧风速条件下的雾滴空间沉积分布特性和下旋气流场性质。Zhang等[20]研究了在不同柑橘树形和不同飞行高度下3W-LWS-Q60S型4旋翼无人机在柑橘树体冠层的雾滴沉积效果。陈盛德等[21-22]研究了HY-B-10L 型无人机不同喷雾作业参数对水稻冠层的雾滴沉积分布的影响。Wang等[23]对4种植保无人机的作业效率和沉积分布均匀性进行了测试与评价。但在这些研究中,反映高度和速度参数的指标往往仅有速度和高度的平均值,喷雾作业中无人机飞行参数是否准确及其变化情况对雾滴沉积分布特性的研究尚未见报道。在植保无人机作业过程中,飞行参数并不是一直保持不变的,要想全面衡量一个作业过程中的飞行参数,必须考虑到整体飞行过程中该参数的变化特点,变异系数可用于表征参数分布均匀性进而反映飞行稳定性,均方根误差可表达实测参数与设定参数的差距大小,再结合参数的平均值,才能全面反映飞行过程中参数的大小、离散程度和与准确性。
本文对4种典型国产植保无人机进行了小麦田间喷雾试验,首次将无人机飞行参数平均值与精准度(变异系数、均方根误差)相结合,针对飞行参数对雾滴沉积分布特性的影响进行了研究,以期为植保无人机田间喷雾作业参数确定、作业条件的选择和田间作业规范的制定提供参考。
1 材料与方法
1.1 材料与设备
试验装置主要为参试植保无人机,北斗卫星定位系统,取样、分析装置以及环境监测装置。
1.1.1 参试植保无人机
参与试验无人机有4种,均为当前国内具有代表性的植保无人机机型,分别为:安阳全丰航空植保科技有限公司生产的3WQF120-12型油动单旋翼无人机和3WQFTX-10型电动多旋翼无人机、无锡汉和航空技术有限公司生产的水星一号型电动单旋翼无人机以及新乡市昌杰农业机械有限公司出产的3WCJ8-10型电动多旋翼无人机,表1为4种无人机的主要技术参数。

表1 参试无人机主要技术参数
注:四点式指4个喷头分别放置于无人机4个旋翼下方、喷头连线呈矩形的喷头分布方式。
Note: Tetrapod means that 4 nozzles are respectively set below 4 rotors of the UAV and the 4 nozzles form a rectangle.
1.1.2 北斗卫星定位系统
为测得厘米级精度的无人机飞行参数,试验中使用高精度差分北斗全球导航卫星系统记录无人机飞行速度、高度和轨迹。该系统分为基准站和移动站2个部分:基准站包括T300型接收机、无线4G数据传输模块(上海司南卫星导航技术股份有限公司),用于接收卫星差分定位数据并将数据上传至云服务器;移动站由M1型北斗伴侣和北斗增强高精度智能手机(北京东方联星科技有限公司)组成,安装在待测无人机上,北斗伴侣通过4G信号从云服务器中下载差分数据,并将定位报文传输到与它通过蓝牙相连的北斗增强高精度智能手机上,无人机飞行过程中的时间、地理坐标、海拔高度、飞行速度等实时数据可保存在手机中,飞行结束后可将手机中保存的无人机飞行过程中定位报文数据导入电脑进行分析。基准站接收机水平静态测量精度为±(2.5+0.5´10–6) mm,垂直静态测量精度为±(5+0.5´10–6) mm,指以基准站为中心的方圆直径;实时动态RTK(real-time kinematic,载波相位差分技术)水平定位精度为±(8+1´10–6) mm,实时动态RTK垂直定位精度为±(15+1´10–6) mm;定位报文传输频率为1 Hz。
1.1.3 取样、分析及环境监测装置
取样装置包括雾滴收集器、双头夹和聚氟乙烯塑料取样杆,雾滴收集器采用7 cm化学分析滤纸(杭州特种纸业有限公司),通过双头夹固定在聚氟乙烯塑料取样杆上。使用电子天平和2 L塑料量杯配置质量分数为0.5%的柠檬黄食用色素(上海染料研究所有限公司)水溶液作为喷雾液,测试后将雾滴收集器的荧光示踪剂洗脱液经722型紫外可见分光光度计(上海仪电分析仪器有限公司)检测其吸光值。试验中风速、风向、温度和湿度等环境气象数据通过Zeno-3200型农业/森林自动气象站(美国原生态有限公司)获取,该气象站的采样频率为1 Hz。
1.2 试验方法
试验于2017年4月中下旬小麦生长旺期在河南省新乡县七里营镇中国农业科学院植保所综合试验基地进行。试验区域为100 m´50 m的小麦地块,株高65~70 cm,行距20 cm,株密度约为30株/m2,试验前用彩旗区分出小区边界顶点。田间试验装置布置情况如图1a所示,纵向雾滴收集带沿航线方向布点,布置于小麦植株冠层顶部距地面约70 cm处,每行15个点分布在一条直线上。为更准确地分析无人机在加减速过程中的雾滴沉积分布情况,采用两侧密、中间疏的非等距布点方式,将“1~15”号取样装置到测试小区无人机起降处边界的距离分别设为1、2、4、7、11、16、33、50、67、84、89、93、96、99 m,设置3次重复,行间距12.5 m,共45个测试点;横向雾滴收集带垂直于航线方向,布置于冠层顶部距地面约70 cm处,取样装置间距1 m,每行11个点,行间距5 m,从无人机起降处边界的左侧开始编号为“1~11”号,试验设置3次重复,共33个测试点。

图1 小麦田间喷雾测试
测试前,各型无人机按照施药液量12 L/hm2、飞行速度5 m/s、距小麦冠层顶部飞行高度2 m的施药参数,按表1中喷洒流量调整并校准喷头流量,测试中喷头流量和压力固定不变,随后进行熟悉试验区域、设定飞行参数等飞行前的准备工作。将北斗定位系统移动站固定在无人机上,用于获取无人机飞行参数。配置质量分数为0.5%的柠檬黄水溶液作为喷雾液,注入无人机药箱。测试开始后,操控手遥控无人机起飞,调整到预定飞行高度,从起降处边界进入测试区域,按照各自在2 m飞行高度下的喷幅进行喷雾作业,飞行结束后立即关闭喷洒系统回到起始点待命(图1b)。
每组测试完毕后,试验人员戴乳胶手套收集各布样点的滤纸,按照“测试组—布样方向—重复号—编号”编号后,装在自封袋中密封带回实验室进行定量分析。分析时,加入10 mL去离子水洗脱示踪剂,使用722型分光光度计在430 nm吸收波长处测量洗脱液吸光度,由式(1)、(2)计算出单位面积雾滴沉积量和沉积分布均匀性变异系数。另外,将北斗增强高精度智能手机上的卫星定位报文数据导入计算机,提取时间、经纬度坐标、速度、高度等数据进行分析,得到各组测试中无人机的飞行参数和飞行参数精准度。
1.3 数据处理
1.3.1 雾滴沉积量
按ISO 24253-1田间喷雾沉积测试标准[24]的规定,单位面积雾滴沉积量计算公式如式(1)所示。

式中dep为单位面积雾滴沉积量,mL/cm2;dil为加入洗脱液的体积,mL;smpl为洗脱液的吸光值;blk为空白采样器的吸光值;spray为喷雾液中示踪剂浓度,g/L;cal为吸光值与示踪剂浓度的关系系数,g/L;col为雾滴收集器面积,cm2。
1.3.2 沉积量及飞行参数变异系数
变异系数(coefficient of variation,CV)为一组数据的标准差与平均数的比值,反映该组数据的离散程度。对于雾滴沉积量,可用于描述雾滴沉积分布均匀性[25],数值越小说明雾滴分布均匀性越好;对于飞行参数(速度、高度),可用于表征飞行稳定性,数值越小说明无人机在作业过程中越稳定。变异系数计算公式为

式中CV为变异系数,%;为标准差;`为平均值;为样本数目;X为第次测量值。
1.3.3 飞行参数均方根误差
均方根误差(root-mean-square error,RMSE)用来衡量观测值同真值之间的偏差,可以表征飞行参数精准度,其值越小表明飞行参数距设定值越近、精准度越高。其计算公式为:
式中RMSE为均方根误差;为真实值。
1.3.4 施药液量
施药液量(application rate)指每单位面积农田上所喷施的农药药液量[26]。其计算公式为

式中为施药液量,L/hm2;为喷头总流量,L/min;为喷幅,m;为行驶速度,m/s。
2 试验结果与分析
2.1 无人机田间施药雾滴沉积分布特性
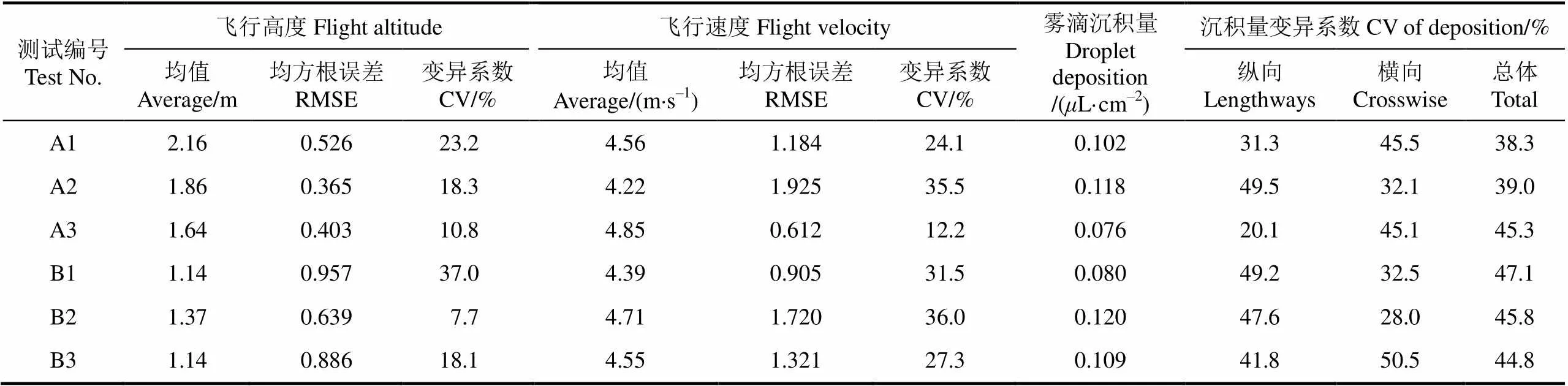
为了分析参试无人机施药时农药雾滴在小麦田间沉积分布特性,采用手动遥控的飞行模式对4种无人机各进行了按照本研究的实际田间生产喷雾试验,飞行速度设为2.00 m/s,飞行高度设为距小麦冠层顶部2.00 m,各无人机喷洒流量如表1中所示,按照式(4)计算出的理论施药液量为12 L/hm2(0.12L/cm2)。其中,4组测试的机型、实测飞行参数、雾滴沉积量、沉积量变异系数如表2所示。

表2 4种机型测试中飞行参数、雾滴沉积量及沉积量变异系数
注:试验过程中环境参数:平均风速1.1 m·s–1、平均温度18.4 ℃、平均相对湿度56.5%。
Note: The environmental parameters during the test: Average crosswind velocity is 1.1 m·s–1, average temperature is 18.4 ℃, average relative humidity is 56.5%.
由表2可知,4种植保无人机施药作业纵向、横向和总体雾滴沉积量变异系数基本在30%~60%范围内,数值远高于ISO 16122-2标准中对地面喷雾机具的沉积分布均匀性变异系数小于10%的要求[27]。3WQFTX-10型无人机由于飞行速度明显慢于其余3种机型,导致其沉积量整体偏高,平均沉积量为理论施药液量的140%左右。对于水星一号型单旋翼电动无人机,结合测试时的实际情况与飞行轨迹可以判断该飞机未能完全覆盖到距测试区域边界1~10 m的区域内,造成纵向测试带两端区域沉积量反而低于中间区域,使该组测试的平均沉积量明显低于其他3种无人机。
喷洒雾滴在纵向、横向雾滴收集器上的沉积分布如图2所示。由图2a可知,4次测试中沿平行于无人机飞行方向(纵向)测试点沉积量数值大小虽有不同,但变化趋势却是类似的,即在航线两端区域(距测试区起降侧边界1~11 m和89~99 m范围内)的沉积量随着距离的变化增减迅速(30% 图2 4种无人机田间雾滴沉积分布 此外,在横向不同位置也呈现出雾滴沉积量差异较大的现象,航线附近的沉积量大都高于0.12L/cm2,根据图2b可以判断出3WQF120-12型和水星一号型无人机相邻喷幅分界线分别位于6号和7号测试点,这2处均远小于喷幅内侧的沉积量(占理论施药液量的65.9%和25.7%),分析主要原因是无人机横向平移距离大于其有效喷幅,导致漏喷。通过测试C的横向沉积则可以探究喷头布置方式对沉积分布的影响,3、7、10号雾滴收集器的沉积量均比相邻测试点明显降低,说明该无人机间距为1.5 m的四点式布局在此飞行高度(1.67 m)下会造成两侧喷头的雾滴重叠程度不足,作业中需保持一定的飞行高度。而对于同为四点式的3WQFTX-10型(喷头间距0.93 m),则不存在同一喷幅内的沉积量明显波动的情况,都在0.15至0.20L/cm2范围内,4号和10号点2个较大的数据应是来源于平移距离过近而产生的重喷。这2种多旋翼无人机喷头分布方式类似,作业过程中飞行高度相近,仅在喷头间距方面有所差异,但雾滴横向沉积分布情况却明显不同,所以在飞行高度低于2.00 m时,四点式多旋翼无人机的喷头间距需适当缩小以避免漏喷,前后2排喷头并不能对雾滴重叠不足产生弥补作用。 因此,对于纵向雾滴沉积分布,影响因素应主要是无人机飞行参数的大小及变化情况;对于横向雾滴沉积分布,主要影响因素是无人机相邻喷头或喷幅间雾滴重合度,横向平移距离与有效喷幅不符以及无人机自身喷雾系统配置不合理都会导致漏喷或重喷现象,降低沉积分布均匀性。 由以上测试结果及分析可知,植保无人机的飞行速度、高度等飞行参数与参数变化情况同雾滴在田间沉积量的多少和分布均匀性都息息相关。均方根误差和变异系数分别是分析一组数据距离设定值差距大小和自身离散程度的参数,可以反映作业过程中飞行参数的变化情况与其飞行稳定性。因此,在雾滴沉积分布均匀性分析中引入飞行参数精准度很有必要,飞行参数精准度结合飞行参数平均值,能全面考量飞行参数对雾滴沉积特性的影响。与多旋翼无人机旋翼下旋气流场分布较复杂、紊乱不同,单旋翼无人机旋翼下旋气流场分布相对简单、明确,即气流从旋翼处开始从上至下呈螺旋状分布,使用单旋翼无人机进行这部分试验可以尽量减少因旋翼气流的变化而引起的雾滴分布不同;而2种参试单旋翼无人机在机身设计和喷头布局上的差异均不大,且均采用扇形雾喷头。因此,为了研究飞行参数及其精准度与雾滴沉积量和分布均匀性的关系,选取2种参试的单旋翼无人机3WQF120-12和水星一号,对A1、B1组测试各进行了2次重复,命名为A2、A3和B2、B3。提取这6次测试中北斗定位系统测得的实时速度和高度,计算出平均飞行速度、速度变异系数、速度均方根误差、平均飞行高度、高度变异系数、高度均方根误差,结果如表3所示。 表3 单旋翼无人机测试中飞行参数、飞行参数精准度、雾滴沉积量及沉积量变异系数 注:试验过程中环境参数:平均风速1.7 m·s–1、平均温度24.6 ℃、平均相对湿度41.2%。 Note: The environmental parameters during the test: Average crosswind velocity is 1.7 m·s–1, average temperature is 24.6 ℃, average relative humidity is 41.2%. 将表3中各类试验结果导入SPSS 20软件进行方差分析可得田间雾滴沉积量及沉积量变异系数的方差分析结果(表4)。由表4中的各因素对雾滴沉积量及其变异系数的影响显著性可知:飞行速度均方根误差对平均沉积量有极显著影响(0.003<0.01);飞行速度变异系数对纵向沉积量变异系数有极显著影响(0.002<0.01);平均飞行高度对总体沉积量变异系数有显著影响(0.018<0.05);其他飞行参数及参数精准度对施药雾滴沉积量和沉积分布均匀性均无明显影响。 表4 雾滴沉积量及沉积量变异系数方差分析 Note: **:<0.01, *:<0.05. 分别对这3组有显著相关关系的试验指标进行回归分析(表5)。结果表明,针对单旋翼无人机进行的6组施药测试中,平均雾滴沉积量与飞行速度均方根误差呈极显著正相关关系(=0.952);纵向雾滴沉积量变异系数与飞行速度变异系数呈极显著正相关关系(=0.963);总体沉积量变异系数与平均飞行高度呈显著负相关关系(=–0.888)。 本次试验中所有测试飞行速度的设定值都是5.00 m/s,测试A和B的6组测试平均速度均小于设定速度,北斗定位系统测得的实时速度也普遍小于设定值。根据式(4),在喷幅变化不大、喷洒流量保持不变的情况下,施药液量与速度成线性正相关,然而表3中的平均速度和平均沉积量的关系并不完全符合这个规律。观察平均速度可以发现其数值相差不大,极差不过0.70 m/s,按照2种无人机喷幅和流量计算出的施药液量变化仅有0.015L/cm2,实则高达0.044L/cm2,接近理论值的3倍。根据方差与回归分析结果,速度的均方根误差会显著影响沉积量的大小,这时速度平均值就不能准确反映沉积量的变化规律,需要采用反映实际速度与设定速度的差异大小的速度均方根误差来分析。因此,在飞行速度小于理论设定值情况下,实际雾滴沉积量会随速度均方根误差的增大而显著提升,使施药液量增大;据此可以推测,当飞行速度大于理论设定值时,雾滴沉积量会随着速度均方根误差的增大而降低。 表5 雾滴沉积量及沉积量变异系数与其显著相关因素回归分析结果 众所周知,无人机在施药过程中喷出的雾滴并不能全部沉积到靶标作物上,地面流失、粒径较小雾滴下降过程中的蒸发、旋翼下旋气流风场与环境风场共同裹挟下的雾滴飘失都会影响雾滴沉积,植保无人机采用的是低容量或超低量喷雾技术,试验采用的扇形雾喷头雾化出的雾滴粒径较小,体积中径在100~200m之间,极易因蒸发或飘移而导致沉积量降低,造成实际沉积量小于理论施药液量。在这种低容量喷雾的条件下,雾滴的损失、施药液量的降低对防治效果将会产生显著影响[28]。另外,由表3可知,速度均方根误差越大,沉积量越接近理论施药液量(0.12L/cm2),这表明无人机喷雾作业时可以在设定速度的基础上适当降低飞行速度,增大飞行速度相对于设定速度的均方根误差,以提高雾滴沉积量,提升喷雾作业效果。 飞行速度变异系数表征了无人机行进过程中的速度变化率的大小,速度变异系数越大,说明速度变化越剧烈,由表5可知,雾滴沿飞行方向上的沉积量变异系数也会随之增大,雾滴沉积分布越不均匀。目前无论在手动操控还是自主飞行模式下,植保无人机单次作业的基本流程是:起飞—调整高度—开启喷雾系统—加速—匀速喷雾—减速—平移—加速—……—减速—降落。施药中无人机在航线两端有多次加速和减速过程,这种加减速过程在飞行中所占比例越大,飞行速度的离散程度越高,变异系数就会越大,此结果进一步印证了无人机飞行状态下的加减速行为是影响纵向雾滴沉积分布均匀性好坏的主要原因。 无人机的速度控制是由飞行控制系统中的GPS或北斗定位模块完成的。目前,对于国产各型植保无人机,飞控系统中采用可达厘米级定位精度的差分RTK技术的屈指可数,造成飞行速度控制精度不足,速度变异系数偏大(20%~30%)。为减小喷雾过程中的飞行速度变异系数,建议升级无人机飞控系统,推进改装含有RTK差分定位功能的GPS或北斗模块,增加无人机作业过程中的飞行稳定性。此外,由前文的试验结果可知,速度分布不均匀会直接导致雾滴分布均匀性不佳,分析这是由于无人机在速度变化时喷洒流量仍保持不变,加减速及平移区域的雾滴沉积量就会随之明显增加。因此,建议采用如下方法从速度控制方面减小沉积分布变异系数:1)如拖拉机作业时设置地头最小拐弯区域一样,植保无人机也需要设置地头起降、平移区域,加减速及平移过程均在作业区域外完成;2)无人机加减速及平移切换航线的状况下关闭喷洒系统;3)在植保无人机上推广应用变量施药系统,该系统能将速度与喷雾流量、雾滴粒径等喷雾参数关联起来,只要输入设定的施药液量,喷雾流量会根据速度的快慢自行调整,保证施药液量不变。 由表5中回归分析结果,在1.1~2.2 m的高度范围和4.2~4.9 m/s的速度范围内,随着无人机飞行高度增加,田间总体沉积量变异系数呈线性减小,说明飞行高度的增加可以使雾滴沉积量的离散程度减小,有效提高雾滴分布的均匀性。无人机飞行高度过低、过于接近作物冠层时,喷杆上相邻喷头喷出的雾滴重叠不足,喷头正下方附近雾滴多,相邻喷头中间位置雾滴少,雾滴分布不均匀;当飞行高度逐渐提升,相邻喷头喷出雾滴重叠更充分,沿喷杆方向不同位置雾滴沉积量差异缩小,雾滴沉积分布均匀性能得到明显优化,这种飞行高度与雾滴沉积分布均匀性的负相关关系与作者此前的雾滴空间质量平衡测试研究中的结论一致[19]。但是,提升高度的另一个结果是易引起雾滴飘失率增大,这主要有2个原因:1)同一区域,在近地面的一定高度,海拔越高,风速越大[29],环境风场也越复杂;2)飞行高度增加,无人机旋翼下旋气流在垂直于地面方向上的流场随之明显减弱,带来下旋气流对雾滴的下压作用减弱的结果[19,30]。当高度增加到一定值之后,高度对雾滴分布均匀性的优化作用会逐渐弱于高度升高引起的雾滴飘失作用,产生田间雾滴沉积量降低、农药利用率下降等不利影响。所以,合理飞行高度的确定需要根据作物特点、地块情况、飞机性能、天气条件和喷雾系统特性等因素综合考虑。 综上所述,针对单旋翼植保无人机低空低量田间喷雾作业,使用飞行速度均方根误差、速度变异系数和高度这3个飞行参数及精准度指标来分析和预测雾滴沉积量和雾滴沉积分布均匀性的方法是合理、有效、可行的。 本文采用高精度北斗定位系统获取无人机飞行参数,使用柠檬黄示踪剂水溶液代替农药对国产4种典型植保无人机进行了小麦田间喷雾测试,得到了各型无人机雾滴田间分布特性,并首次对单旋翼植保无人机飞行参数精准度(变异系数CV、均方根误差RMSE)对雾滴沉积分布特性的影响进行了研究和分析,测试结果通过SPSS 20软件进行显著性和回归分析,得到以下结论: 1)4种无人机在距航线起点和终点10 m左右的两端区域内的雾滴沉积量变化剧烈(30% 2)对于单旋翼植保无人机田间喷雾作业,在平均飞行高度1.1~1.2 m,平均飞行速度4.2~4.9 m的飞行参数下,平均雾滴沉积量与飞行速度均方根误差呈极显著正相关关系(<0.01,=0.952);纵向雾滴沉积量变异系数与飞行速度变异系数呈极显著正相关关系(<0.01,=0.963);总体沉积量变异系数与平均飞行高度呈显著负相关关系(<0.01,=–0.888)。因此,使用飞行速度均方根误差、速度变异系数和高度这3个飞行参数及精准度指标来分析和预测雾滴沉积量和分布均匀性的方法是合理、有效、可行的。 根据以上结论,可以通过以下方法来提高植保无人机施药雾滴沉积分布效果:1)适当提高飞行高度,降低飞行速度;2)设置地头起降、平移区域,加减速及平移过程均在作业区域外完成;3)无人机加减速及平移切换航线的过程中关闭喷洒系统;4)应用喷雾量与速度相关的变量施药系统;5)在飞控系统中加装包含载波相位差分定位功能的定位模块。 [1] He Xiongkui, Jane Bonds, Andreas Herbst, et al. Recent development of unmanned aerial vehicle for plant protection in East Asia[J]. Int J Agric & Biol Eng, 2017, 10(3): 18-30. [2] Lan Yubin, Chen Shende, Fritz B K, et al. Current status and future trends of precision agricultural aviation technologies [J]. Int J Agric & Biol Eng, 2017, 10(3): 1-17. [3] 周志艳,臧英,罗锡文,等. 中国农业航空植保产业技术创新发展战略[J]. 农业工程学报,2013,29(24):1-10. Zhou Zhiyan, Zang Ying, Luo Xiwen, et al. Technology innovation development strategy on agricultural aviation industry for plant protection in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(24): 1-10. (in Chinese with English abstract) [4] 吕宏靖,李哲,于丽杰. 无人旋翼植保机的应用研究[J]. 农业科技与装备,2015(5):68-69. [5] 杜文,曹英丽,许童羽,等. 无人机喷雾参数对粳稻冠层沉积量的影响及评估[J]. 农机化研究,2017,39(4): 182-186, 191. Du Wen, Cao Yingli, Xu Tongyu, et al. Effect and assessment of uav spraying parameters at japonica rice canopies[J]. Journal of Agricultural Mechanization Research, 2017, 39(4): 182-186, 191. [6] 薛新宇,梁建,傅锡敏. 我国航空植保技术的发展前景[J]. 中国农机化,2008(5):72-74. Xue Xinyu, Liang Jian, Fu Ximin. Prospect of aviation plant protection in China[J]. Chinese Agricultural Mechanization, 2008(5): 72-74. (in Chinese with English abstract) [7] Huang Yanbo, Hoffmann W C, Lan Yubin, et al. Development of a spray system for an unmanned aerial vehicle platform [J]. Transactions of the ASABE, 2009, 25(6): 803-809. [8] Huang Y, Thomson S J. Characterization of spray deposition and drift from a low drift nozzle for aerial application at different application altitudes[J]. Int J Agric & Biol Eng, 2011, 4(4): 28-33. [9] 何雄奎. 亚洲农用无人机发展与施药应用[J]. 无人机,2016(2):19-22. [10] 张亚莉,兰玉彬,Bradley K Fritz,等. 美国航空静电喷雾系统的发展历史与中国应用现状[J]. 农业工程学报,2016,32(10):1-7. Zhang Yali, Lan Yubin, Bradley K Fritz, et al. Development of aerial electrostatic spraying systems in the United States and applications in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(10): 1-7. (in Chinese with English abstract) [11] Huang Yanbo, Ouellet-Plamondon C M, Thomson S J, et al. Characterizing downwind deposition of the off-target drift from aerially applied glyphosate using RbCl as tracer [J]. Int J Agric & Biol Eng, 2017, 10(3): 31-36. [12] 陈宝昌,李存斌,王立军,等. 飞机喷雾及影响其喷雾质量的因素[J]. 农机使用与维修,2014(5):26-29. [13] 张东彦,兰玉彬,陈立平. 中国航空施药技术研究进展与展望[J]. 农业机械学报,2014,45(10):53-59. Zhang Dongyan, Lan Yubin, Chen Liping, et al. Current status and future trends of agricultural aerial spraying technology in China[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(10): 53-59. (in Chinese with English abstract) [14] 王潇楠,何雄奎,王昌陵,等. 油动单旋翼植保无人机雾滴飘移分布特性[J]. 农业工程学报,2017,33(1):117-123. Wang Xiaonan, He Xiongkui, Wang Changling, et al. Spray drift characteristics of fuel powered single-rotor UAV for plant protection[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(1): 117-123. (in Chinese with English abstract) [15] 邱白晶,王立伟,蔡东林,等. 无人直升机飞行高度与速度对喷雾沉积分布的影响[J]. 农业工程学报,2013,29(24):25-32. Qiu Baijing, Wang Liwei, Cai Donglin, et al. Effect of flight altitude and speed of unmanned helicopter on spray depositionuniform[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(24): 25-32. (in Chinese with English abstract) [16] 秦维彩,薛新宇,周立新,等. 无人直升机喷雾参数对玉米冠层雾滴沉积分布的影响[J]. 农业工程学报,2014,30(5):50-56. Qin Weicai, Xue Xinyu, Zhou Lixin, et al. Effects of spraying parameters of unmanned aerial vehicle on droplets deposition distribution of maize canopies [J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(5): 50-56. (in Chinese with English abstract) [17] Qin Weicai, Qiu Baijing, Xue Xinyu, et al. Droplet deposition and control effect of insecticides sprayed with an unmanned aerial vehicle against plant hoppers[J]. Crop Protection, 2016, 85: 79-88. [18] 王昌陵,何雄奎,王潇楠,等. 无人植保机施药雾滴空间质量平衡测试方法[J]. 农业工程学报,2016,32(11): 54-61. Wang Changling, He Xiongkui, Wang Xiaonan, et al. Testing method of spatial pesticide spraying deposition quality balance for unmanned aerial vehicle [J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(11): 54-61. (in Chinese with English abstract) [19] 王昌陵,何雄奎,王潇楠,等. 基于空间质量平衡法的植保无人机施药雾滴沉积分布特性测试[J]. 农业工程学报,2016,32(24):89-97. Wang Changling, He Xiongkui, Wang Xiaonan, et al. Distribution characteristics of pesticide application droplets deposition of unmanned aerial vehicle based on testing method of spatial quality balance[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(24): 89-97. (in Chinese with English abstract) [20] Zhang P, Deng L, Lyu Q, et al. Effects of citrus tree-shape and spraying height of small unmanned aerial vehicle on droplet distribution[J]. Int J Agric & Biol Eng, 2016, 9(4): 45-52. [21] 陈盛德,兰玉彬,李继宇,等. 小型无人直升机喷雾参数对杂交水稻冠层雾滴沉积分布的影响[J]. 农业工程学报,2016,32(17):40-46. Chen Shengde, Lan Yubin, Li Jiyu, et al. Effect of spray parameters of small unmanned helicopter on distribution regularity of droplet deposition in hybrid rice canopy[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(17): 40-46. (in Chinese with English abstract) [22] Chen Shende, Lan Yubin, Li Jiyu, et al. Effect of wind field below unmanned helicopter on droplet deposition distribution of aerial spraying[J]. Int J Agric & Biol Eng, 2017, 10(3): 67–77. [23] Wang Shilin, Song Jianli, He Xiongkui, et al. Performances evaluation of four typical unmanned aerial vehicles used for pesticide application in China[J]. Int J Agric & Biol Eng, 2017; 10(4): 22–31. [24] ISO/TC 23/SC 6. ISO 24253-1:2015. Crop protection equipment-Spray deposition test for field crop [S]. [25] Smith D B. Uniformity and recovery of broadcast spray using fan nozzles [J]. Transactions of the ASAE, 1992, 35: 39-44. [26] 何雄奎. 药械与施药技术[M]. 北京:中国农业大学出版社,2012. [27] ISO/TC 23/SC 6. ISO 16122-2:2015. Agricultural and forestry machinery-Inspection of sprayers in use-Part 2: Horizontal boom sprayers [S]. [28] 朱金文,吴慧明,朱国念. 施药液量对农药药理作用的影响[J]. 浙江农业学报,2003,15(6):372-375. Zhu Jinwen, Wu Huiming, Zhu Guonian. A review of influence of spray volume on pesticides efficacy[J]. Acta Agricultural Zhejiangensis, 2003, 15(6): 372-375. (in Chinese with English abstract) [29] 刘学锋,任国玉,梁秀慧,等. 河北地区边界层内不同高度风速变化特征[J]. 气象,2009,35(7):46-53. Liu Xuefeng, Ren Guoyu, Liang Xiuhui, et al. The characteristics of wind speed variation at different altitudes of boundary layer in Hebei province [J]. Meteorological monthly, 2009, 35(7): 46-53. (in Chinese with English abstract) [30] 廖娟,臧英,周志艳,等. 作物航空喷施作业质量评价及参数优选方法[J]. 农业工程学报,2015,31(增刊2): 38-46. Liao Juan, Zang Ying, Zhou Zhiyan, et al. Qualit evaluation method and optimization of operating parameters in crop aerial spraying technology[J] Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(Supp.2): 38-46. (in Chinese with English abstract) 王昌陵,宋坚利,何雄奎,王志翀,王士林,蒙艳华. 植保无人机飞行参数对施药雾滴沉积分布特性的影响[J]. 农业工程学报,2017,33(23):109-116. doi:10.11975/j.issn.1002-6819.2017.23.014 http://www.tcsae.org Wang Changling, Song Jianli, He Xiongkui, Wang Zhichong, Wang Shilin, Meng Yanhua. Effect of flight parameters on distribution characteristics of pesticide spraying droplets deposition of plant-protection unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(23): 109-116. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.23.014 http://www.tcsae.org Effect of flight parameters on distribution characteristics of pesticide spraying droplets deposition of plant-protection unmanned aerial vehicle Wang Changling1, Song Jianli1, He Xiongkui1※, Wang Zhichong1, Wang Shilin1, Meng Yanhua2 (1.100193,;2.455001,) As a consequence of population aging and shrinkage in China, the trend of labor shortage for agricultural production has grown and will continue in future. Acceleration of agricultural mechanization has been proposed as a developmental strategy in support of steady and sustainable development of agriculture in China. In alignment with this national developmental plan, the use of unmanned aerial vehicle (UAV) for pesticide application contributes to the advancement of plant protection mechanization by providing improved ability to apply pesticide in a time sensitive manner with enhanced safety and efficiency.The flight parameter of UAV was one kind of the most important indices affecting the quality of aerial pesticide application. To explore the distribution characteristics of pesticide spraying droplets deposition of UAV and the effect of flight parameters (flight altitude and velocity) and parameter accuracy on the deposition distribution characteristics, the spraying droplets depositions of 4 models of typical Chinese domestic UAVs (3WQF120-12, Mercury Ⅰ, 3WCJ8-10 and 3WQFTX-10) were tested in the wheat field in Xinxiang City, Henan Province in April, 2017. The high-precision Beidou navigation satellite system was used for recording the accurate working altitude, velocity and track of UAV, and the tartrazine tracer water solution of 0.5% was adopted to replace pesticide liquid for spraying. The filter paper with the diameter of 7 mm was used for collecting spraying droplets from UAV at the height of 0.7 m on the top of the wheat canopy, and the sensor of Zeno-3200 weather station was set at the height of 6 m to record the environmental parameters at test site. The size of the testing field was 50 m × 100 m and there were 15 sampling points in a straight line with 3 duplications for longitudinal droplet deposition distribution and 11 sampling points also with 3 duplications for crosswise one. During every test, the operator controlled the UAV remotely to take off, when the UAV reached the required height, then open the spraying system and make the unmanned aircraft fly over the experimental area according to the planned flight. After tests, the eluent from the filter paper was used to measure the absorbance of the tracer tartrazine by the 722 type spectrophotometer and the droplet deposition in every test was figured out. Combining the flight parameters with their coefficient of variation (CV) and root mean square error (RMSE), the impact factors on deposition distribution characteristics were studied and the results were analyzed by significance and regression analysis via SPSS 20 software. The results showed: The deposition in the area of both ends of flight route varied violently (30%<CV<70%) and there were the maximal values, while the deposition in the area of the middle of route was relatively steady (CV<20%); the main factor impacting the crosswise deposition distribution was the overlap ratio of droplets of adjacent nozzles and spraying swath, and too high or too low overlap ratio both led to the poor uniformity of droplets distribution; with regard to pesticide application operation of single-rotor UAV, at the altitude of 1.1-1.2 m, and the velocity of 4.2-4.9 m/s, there was a high significant positive correlation between average droplets deposition and the RMSE of flight velocity (<0.01,=0.952) and between the CV of the longitudinal droplets deposition and the CV of flight velocity (<0.01,=0.963), and the CV of the total deposition was significantly negatively correlated with the average flight altitude (<0.01,=-0.888). So, the method that the droplets deposition and distribution uniformity were analyzed and predicted by the flight parameters and their accuracy, such as the RMSE and CV of flight velocity and flight altitude, was reasonable, effective and feasible. The results of this study provide some theory reference for the determination of the ideal spraying parameters of UAV pesticide application work, the choice of environmental conditions of UAV operation and the formulation of standard working practice of UAV aerial spraying. unmanned aerial vehicle; pesticide; spraying; droplet; flight parameters; deposition; uniformity of distribution. 10.11975/j.issn.1002-6819.2017.23.014 S252+.3 A 1002-6819(2017)-23-0109-08 2017-08-10 2017-10-22 公益性行业(农业)科研专项资助项目(201503130);京津冀协同创新重大专项-北京市重点研发计划(D171100002317003) 王昌陵,博士生,主要从事无人航空植保施药技术研究。 Email:wcl1991@cau.edu.cn 何雄奎,教授,博士生导师,主要从事植保机械与施药技术研究。Email:xiongkui@cau.edu.cn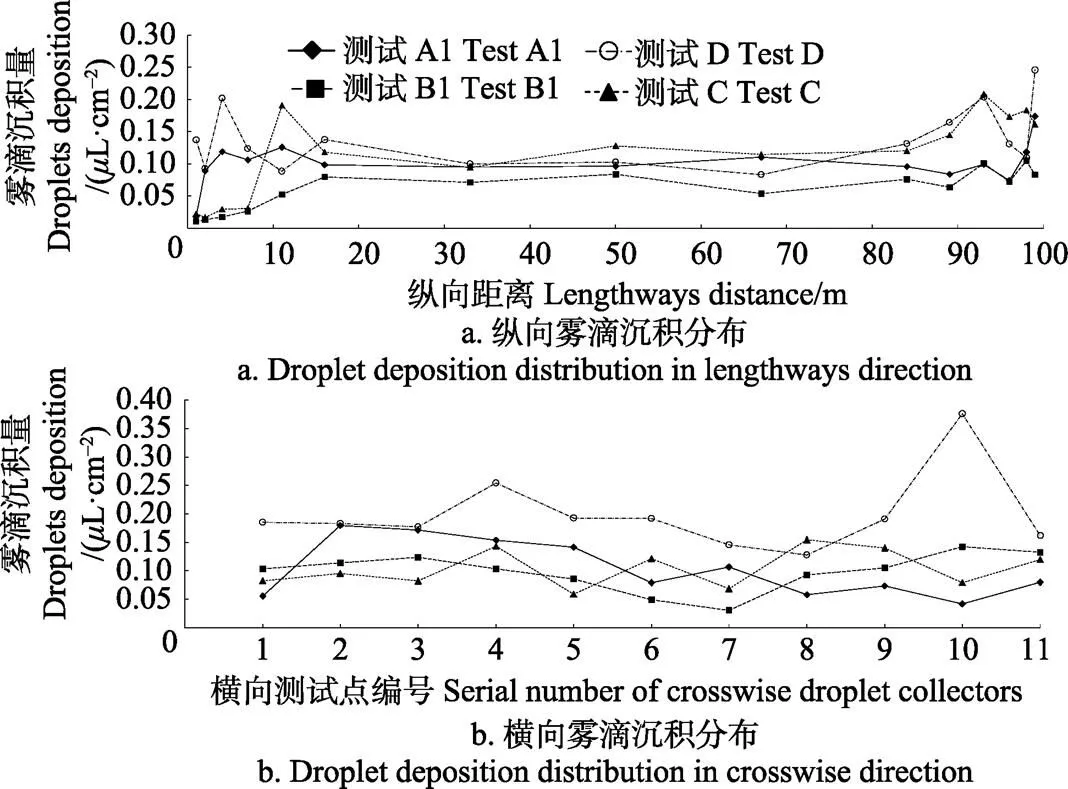
2.2 飞行参数及其精准度对雾滴沉积分布的影响显著性和回归分析

2.3 飞行速度均方根误差对雾滴沉积量的影响

2.4 飞行速度变异系数对纵向沉积量变异系数的影响
2.5 飞行高度对总体沉积量变异系数的影响
3 结论与讨论