基于卫星控制仿真转台的多路可充电直流电源系统设计
2017-12-14,
,
(哈尔滨工业大学 航天学院,哈尔滨 150001)
基于卫星控制仿真转台的多路可充电直流电源系统设计
高桦,白子扬
(哈尔滨工业大学航天学院,哈尔滨150001)
针对航天工程地面仿真系统研制任务需要,设计和实现了可重复充电的多路直流稳压电源;对实验转台上用电设备的做了需求分析,给出了电路设计方案,对稳压模块进行了选型;电源系统采用12V7Ah蓄电池,稳压模块采用DC-DC,功率放大器采用OPA548T;实验结果证明设计是成功的,8路电压输出误差平均值优于0.1 V ,电源系统静态工作时间长达10小时,满足了仿真任务的设计需要。
直流电源系统;蓄电池;DC-DC;OPA548T;姿态控制物理仿真系统
0 引言
可重复充电的多路直流稳压电源广泛应用在航空航天工程领域中,主要用来解决应用系统中不方便提供交流动力电源时的问题,因此,研制该系统成了当前的重要需求。在电源系统设计的过程中,首先要考虑的就是用电设备的用电需求,即必须先满足用电设备的工作电压和工作电流,并留出足够的功率余量以保证其工作的可靠性[1-3]。在用电需求满足之后,电源系统供电持续时间是紧接着考虑的问题。如果电源供电时间过短,电源电量消耗过快,仿真控制实验就无法完整进行,所以需要选择用电容量满足要求的电源。其次,电源系统的集成性也是很必要的。将电源系统集成化,能节约开发时间,提高产品质量,降低成本。在最后,还应认真考虑布局、接地回路等,以达到较高的电压调整精度和低噪音,同时避免系统中电路之间的干扰、振荡以及过热等问题的出现[4-7]。本文介绍了该系统的设计和实现方法。
1 需求分析
图1和图2分别是卫星姿态控制仿真实验系统硬件原理框图和系统实物照片。系统工作原理是:首先使实验转台悬浮。PC机通过无线网卡将控制实验程序下载至DSP控制器,光纤陀螺作为角速度测量传感器,负责采集转台角位移偏差数据,DSP将采集的转角位移偏差数据,通过控制算法形成控制命令数据,由D/A通道输出,从而驱动飞轮工作,使转台机动到设定角位置。可充电8路稳压电源为台上用电设备提供直流电源。
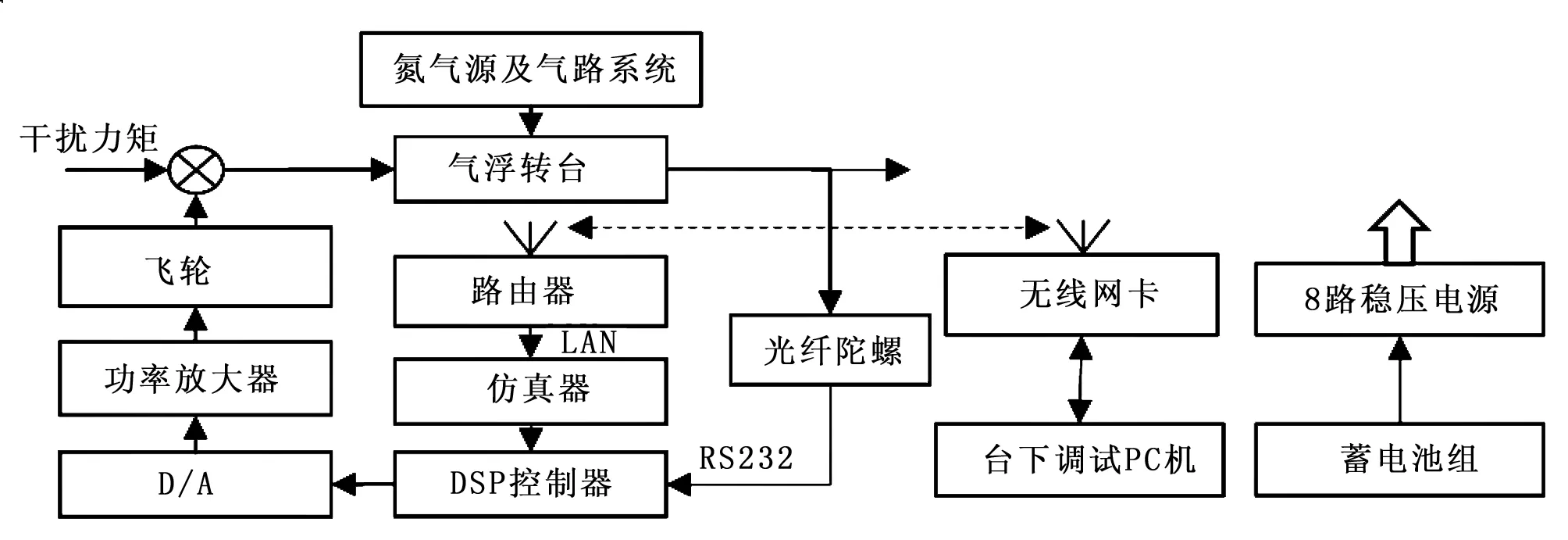
图1 卫星姿态控制仿真系统原理框图

图2 飞行器仿真控制实验转台系统
卫星姿态控制实验台台上用电设备如表1所示。表1显示了实验台上共有8个用电设备,分别是:DSP目标板和D/A芯片,他们是用来控制实验台的;光纤陀螺,它是用来测量实验台角速度的;电磁阀和反作用飞轮,他们是作为执行机构驱动实验台的;功率放大器,它是用来为电磁阀和飞轮提供功率驱动电压的;DSP仿真器和路由器,他们是用来与台下PC机建立无线数据通讯,进行实验控制程序的下载。

表1 姿态控制实验台台上设备用电统计表
从表1可以看出输出电源路数是10路,输出电压的种类是6种,合计功率实测值约89 W。其中功率Pn′代表标称值,功率Pn代表实测值。
2 可充电多路电源系统的电路设计
实验台上直流电源系统的作用就是将直流电源输入总电压变压和稳压后按不同电压种类分别分配给台上8个用电设备使用,并提供稳定的工作电压和工作电流。
需要遵循以下几条原则:
1)确定电源规格。包括确定电源功率,电源输出路数以及电源尺寸。电源功率要留出足够的余量。在系统设计时要认真进行器件选择和工作电压规划,尽量减少工作电压种类。从表1和表2 中可以看出,输入电压和输出电压要满足实际需要,稳压模块输出电流和输出功率的容量选择要大于实际需要。
(2)使用标准模块。设计系统时,应尽可能使用市场上通用的电源模块。这样可缩短设计和开发的时间,提高可靠性,降低设计成本和产品成本。从表2中可以看出选择的稳压模块均是市场可以买到的。

图3 实验台台上电源系统设计原理图
3)冷却方法。设计系统时,必须认真考虑散热问题。电路箱内布局均匀安装了5块电路板,50 W以上的大功率稳压模块和功率放大器均安装了散热片。
4)布局。安排好电源的位置,尽可能缩短输入和输出连线。系统中较长的AC馈线就像接收天线一样,会增加EMI,而过长的输出馈线会导致电压调整精度降低,增加噪音。把表2中列出的稳压模块及电压表和电流表安装集成在一个电路箱内。
5)连接导线的尺寸。在选择电源时,除了考虑输出电压、电流外,还应重视负载连接导线的电阻。为减少连线电阻所造成的压降,应该尽可能缩短电源输出端与负载间的距离,并且增大连接导线的截面积[8-12]。实际制作中把稳压模块输入电路和输出电路均分别共地,导线选用多股铜导线,尽可能短的连接,并可满足正常工作。
台上直流电源系统原理框图如图2所示。实验台台上电源系统的电源是由4个12 V/7 AH的蓄电池串并联后提供,总电源的电源电压是24 V,总输出容量是14 Ah。电源系统安装了一块电压表和一块电流表,用来监测蓄电池总输出电压和电源系统的总工作电流。每个蓄电池电压使用变得较低时需要由充电器充电。设置了一个电源开关管理整个直流电源系统供电开闭。
电源24 V经过各稳压模块后,共提供了8路直流电源输出供给台上设备使用。其中±15 V是给DSP控制器的D/A供电,+5 V/4A是给DSP控制器的目标板供电,±12 V是给执行机构反作用飞轮的功率放大器供电,+28 V是给执行机构反作用飞轮提供电源,±28 V是给执行机构喷气系统的功率放大器供电,+5 V /2A是给DSP的仿真器和陀螺分别供电,+12 V/1.67A是给路由器供电。
3 DC-DC转换模块选型
在稳压电源模块的设计和选择中,根据图2中各稳压模块输入电压、输出电压与输出电流,以及上述设计原则,对稳压模块进行选型。所选稳压模块型号和数量如表2所示。
要求的情况下尽可能短。

表2 稳压模块型号选择
表2是根据电源产品手册进行选型的,稳压模块输入电压范围为18~36 V。经计算得知,当每个蓄电池电压下降至9 V以下时,稳压模块将无法正常输出。故当蓄电池电量低于9 V时,应及时更换电池并充电,从而保证实验的正常进行。
4 功率放大器设计及实现
功率放大器电路是指对执行机构的反作用飞轮和喷气系统的电磁阀的驱动电路。图4是用于驱动飞轮的功率放大器电路,在设计飞轮功放电路中,输入电压为0~2 V,输出电压为0~5 V。功放电源电压为±12 V。功放电路采用反相放大电路,功率集成放大器采用型号为OPA548T,并安装了散热片。取R1=2 kΩ,R2=5.1 kΩ,放大系数K1=2.5。公式(1)为反相放大器电路的输入信号和输出信号的关系式。

(1)
图4是用于驱动电磁阀的功率放大器电路。在设计电磁阀功放电路中,输入电压为±4 V,输出电压为±24 V。功放电源电压为±28 V。功放电路采用同相放大电路,功率集成放大器采用型号为OPA548T,并安装了散热片。取R1=1 k,R2=5.1 k,放大系数K2=6.1。公式(2)为同相放大器电路的输入信号和输出信号的关系式。
(2)
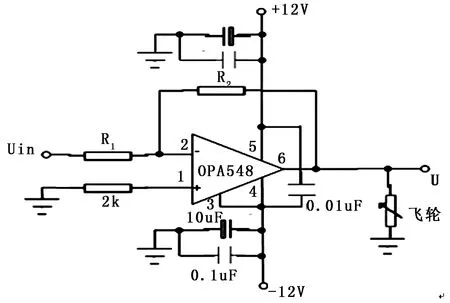
图4 飞轮功放电路图

图5 电磁阀功放电路图
通过功放电路实验验证,执行机构飞轮和电磁阀系统均工作在功放线性区。
5 实验数据及分析
多路直流电源系统经实验完成后,测量的电源输出数据如表5所示。
通过表5可以看出,对电源系统带上全部负载时电路输出电压实测值与其设计值对比,我们可以看到,实测值与设计值之间的误差在允许范围内,平均误差优于0.1 V。电源系统的静态使用时间T静态为:

(3)
式中,Q为蓄电池组总能量,单位为焦耳,U为蓄电池组输出电压,单位为伏,C为蓄电池组电池容量,单位为安时。W为台上用电设备静态实测总功率,单位为瓦。由公式(3),经计算得:

在蓄电池完全充满电的情况下,电源系统可以支持整个实验控制仿真转台设备在静态工作状态下约10小时。动态状态下,根据飞轮和喷气系统的使用频次,它的工作电流比静态较大,因此,动态工作状态下可连续使用达5小时左右,电源系统经过一段使用时间后发现各项功能和性能满足了仿真实验需要。

表5 电源系统带上全部负载时电路静态输出数据
6 结论
设计和实现了飞行器姿态控制仿真转台电源系统,该系统为8路的可充电直流电源,采用蓄电池作为充电电池,稳压电路采用DC-DC,分别采用了一块电压表和一块电流表监测电源系统的总电压和总电流,设计和实现了飞轮和喷气系统的功率放大器电路,经实验验证,该电源系统的功率和电压路数满足了设计要求,误差优于0.1V,静态下可提供约10小时的供电时间。该系统还具备集成性好,布局合理,抗干扰性好,稳压电源模块具有抗短路保护及散热性好等优点。该项研究成果可应用在航天器姿态仿真控制系统研制及其他相关的工程领域中。
[1] 张 松,李 杰,侯利朋,等.便携可调高功率升压电源设计[J].实验室研究与探索,2014(3):101-109.
[2] 余炽业,何志辉,宋 跃.DC-DC开关电源模块并联供电系统[J].电源技术,2012(6):851-854.
[3] 胡亮灯,孙 驰,赵治华,等.高电压宽范围输入低电压输出的DC-DC辅助电源设计[J].电工技术学报,2015(3):851-854.
[4] 侯世英,陈剑飞,孙 韬,等.基于开关电容网络的DC-DC变换器[J].电工技术学报,2014(10):90-97.
[5] 魏晓光,王新颖,高 冲,等.用于直流电网的高压大容量DC/DC变换器拓扑研究[J].中国电机工程学报,2014(S1):218-224.
[6] 文常保,贾亚飞,李演明,等.一种外部可调限流型恒流/恒压DC-DC转换系统[J].微电子学,2014(6):722-726.
[7] 池上升,胡 炜,樊明辉, 等.电子技术应用,一种适用于降压DC-DC的改进型电流检测电路[J].2014(9):41-47.
[8] 陆 婷,杜月林,杨 飞,等.大功率双向DC-DC电源变换器实验装置设计[J].实验技术与管理,2016(9):100-105.
[9] 侯惠淇,韩志刚,JordiCosp-Vilella.线性辅助的DC-DC电压转换器的设计[J].电子技术应用,2015(7):47-49.
[10] 韩冬林.基于LCS703HG的高压DC-DC电源设计[J].电源技术,2012(2):1934-1937.
[11] 茹金平,陈得友.软开关隔离型升压DC-DC变换器设计与实现[J].电子器件,2016(2):305-311.
[12] 房绪鹏,庄见伟,李 辉.一种新型双向DC—DC变换器[J].工矿自动化,2016(9):52-56.
DesignofMulti-channelRechargeableDCPowerSupplySystemBasedonSatelliteSimulationPlatform
Gao Hua,Bai Ziyang
(School of astronautics,Harbin Institute of Technology,Harbin 150001,China)
In order to meet the needs of ground simulation system for aerospace Engineering, we design and implement a multichannel DC regulated power supply. In this paper, we give the demand analysis of the electrical equipment on the experimental platform, provide the circuit design scheme and select the voltage regulator module. The power system uses a storage battery pack composed of 12 V7Ah batteries. The voltage regulator module uses DC-DC. And the power amplifier uses OPA548T.The experimental results show that our design is a great success. At last, we control the average value of 8-channel voltage output error within 0.1 Volts.The power system has a quiescent operating time of up to 10 hours and meets the development needs of design tasks.
DC power system; storage battery;DC-DC;OPA548T; attitude control system of semi physical simulation
2017-05-31;
2017-07-21。
高 桦(1958-),男,黑龙江哈尔滨人,副教授,主要从事飞行器导航智能测控与仿真技术方向研究。
1671-4598(2017)09-0311-04
10.16526/j.cnki.11-4762/tp.2017.09.079
V448.25+
B
