基于移动机器人的室内火灾预警点探测与定位的方法研究
2017-12-14,,
,,
(武汉理工大学 机电工程学院,武汉 430070)
基于移动机器人的室内火灾预警点探测与定位的方法研究
张钏钏,陈国良,李晓龙
(武汉理工大学机电工程学院,武汉430070)
火灾探测技术已成为对火灾进行预防的重要手段之一,目前常用的固定式火灾探测装置不能自主的探测和定位到火警点,对火灾发生初期的预防和灭火有一定的局限性;论文针对该问题,在分析火灾探测技术的基础上,提出一种多位姿仿人鼻的火灾探测装置,并制备出样机,同时尝试将其与可移动机器人结合来实现对室内火警点的探测和定位;基于不同的烟雾情况制定出不同的探测准则,根据该准则进行路径轨迹仿真,经过仿真结果可以看到移动机器人最终定位到火警点的位置;可移动的火灾探测装置在探测和定位到火警点的过程中,若所在空间中由拐角或家具死角导致烟雾扩散有聚集死角的情况存在,会对探测和定位过程造成很大的影响,仿真实验中的移动机器人在探测和定位火警点中的轨迹可以看出死角的存在虽然影响了对火警点的探测,但最终还是能够探测和定位到火警点,其路径轨迹表现出很好的一致性和连续性。
火灾探测;移动机器人;目标定位
0 引言
火灾安全问题越来越成为人们所关注的焦点,人们已由过去被动接受火灾,开始转变为主动探测与预防火灾。火灾的发生和发展是一个极其复杂的过程,存在着丰富的特征信息。火灾探测的基本方法是利用传感技术探测火灾特征信息,运用相关的特征提取与融合算法实现对火灾的预测。火灾探测的研究主要集中在两个方面: 一是火灾发生时的物理特征及其探测方法; 二是基于物理特征的探测信息,火警的预测算法[1]。目前,火灾发生时所表现的物理特征分为:温度、火焰、烟雾等,其对应的火灾探测方法有感温、感光、感烟等探测方法。
但是目前的这些火灾探测装置都难以实现本课题火灾发生前通过烟雾探测的方法来提前得知火灾情况,并定位到火警点的目的。其原因主要在于:
1) 一般的感烟探测器固定在建筑顶部,在大空间室内环境,烟雾上升至一定高度会被周围的空气冷却,停留空中不再上升,使得传统的感烟探测器失去了作用。
2)现有的感烟火灾探测器为非自主式工作方式,仅能探测到烟雾并进行报警。不能通过烟雾的变化来自主的定位到火警点。
总之,普通型感烟火灾探测器易受固定式、非自动式、空间高度、气流等复杂条件的限制,有时达不到极早期火灾探测报警的要求。
1 火灾早期的烟雾扩散模型
火警点的烟雾扩散有各种形式,其扩散服从热导定律,本论文的前提条件是室内空旷无对流的环境中进行烟雾探测和定位的,不考虑空气流动对烟雾扩散的影响。此情况下烟雾通常多以高斯分布为基本扩散模型[26]。高斯分布又名正态分布,其分布函数为:
(1)
假设只有一个火警点时,其烟雾强度满足如下的高斯分布[1]。
C=C0+S*e-r2/b
(2)
式中,C为烟雾强度;C0为该区域内烟雾强度的背景值;S为火警点处烟雾强度;b为高斯分布参数;r为烟雾探测点与火警点的距离。
1)浓度背景值C0:烟雾浓度背景值为在没有其他烟雾源时,当地自然条件下产生的烟雾浓度值。本论文中的自然条件不考虑风俗热量等环境因素对烟雾扩散的影响。故,根据所在场地的具体背景而言,简单起见,分析时将其取值为0。
2)高斯分布模型参数b:平面区域内计算已知点源的高斯分布模型参数b时,直接利用点源和某个相应的受影响点之间的关系,即它们相距的距离和各自的烟雾强度来计算。可通过实验获得多个 不同距离对应的烟雾浓度,并将实验结果代入式(2),根据极大似然估计法获得b的极大似然估计值。
由上述的烟雾扩散模型函数可知:烟雾的浓度随着与火警点之间的距离变换而发生变化的,其具体扩散示意图如图1所示。

图1 烟雾与火警点的距离梯度图
由图1可知,
r1gt;r2gt;r3gt;r4
(3)
与火警点的距离相对应的烟雾浓度关系为:
c1lt;c2lt;c3lt;c4
(4)
将公式(3)中的不同值带入到式(2)中,会得到相应的浓度值,由上述可知,随着r的增大,相应点的烟雾强度以非线性方式减小,根据这样的烟雾扩散模型,可通过实时监测烟雾强度来不断趋近于火警点。
2 火灾探测装置的原理及机构设计
由烟雾的分布情况可知,当烟雾探测装置处于火警点制造的烟雾范围内,可通过测量装置所在位置周围的烟雾强度,定位到烟源的方向。
烟雾探测时,单一的传感器无法对烟雾源进行定位[2]。分析人类感知与定位烟雾的过程可知,当人初步感知到烟雾的瞬间,会通过鼻腔的缩放加大烟雾的吸入量以强化对烟雾的判断,接着会下意识地寻找烟源,在看不见烟雾的情况下,将扭动其颈部改变鼻子的方位,通过多次的试探性感知以实现对烟源的定位。
本论文基于人类鼻子感知与定位烟源的过程设计一种多位姿调整的仿人鼻烟雾探测装置,该装置采用类似于人鼻的双烟道结构,具有类似于人鼻方位调整的转动与俯仰自由度,以及模拟人鼻腔缩张的双烟道张合自由度,可实现对鼻子运动的模拟。
图2为双烟管道平面结构示意图,采用螺旋副结构实现双烟管道的张合自由度。简单分析其运动如下:图中,与双烟管道水平位置3为螺旋滑块起始位置,管道距离螺旋轴为b。螺旋滑块的起始位置3到位置1的距离为l;Φ3为左鼻烟管道摆动角,Φ4为右鼻烟管摆动角,则在起始位置3时:
Φ3=Φ4=0
(5)
当螺旋滑块从位置3运动到任意位置1时:

(6)
图中a为螺旋滑块移动的距离,因每转一圈移动m,当转n圈时移动的距离为a,则:
a=nm
(7)
由此可通过螺旋副的移动距离来实现左右鼻烟管道需要旋转的角度Φ3、Φ4。
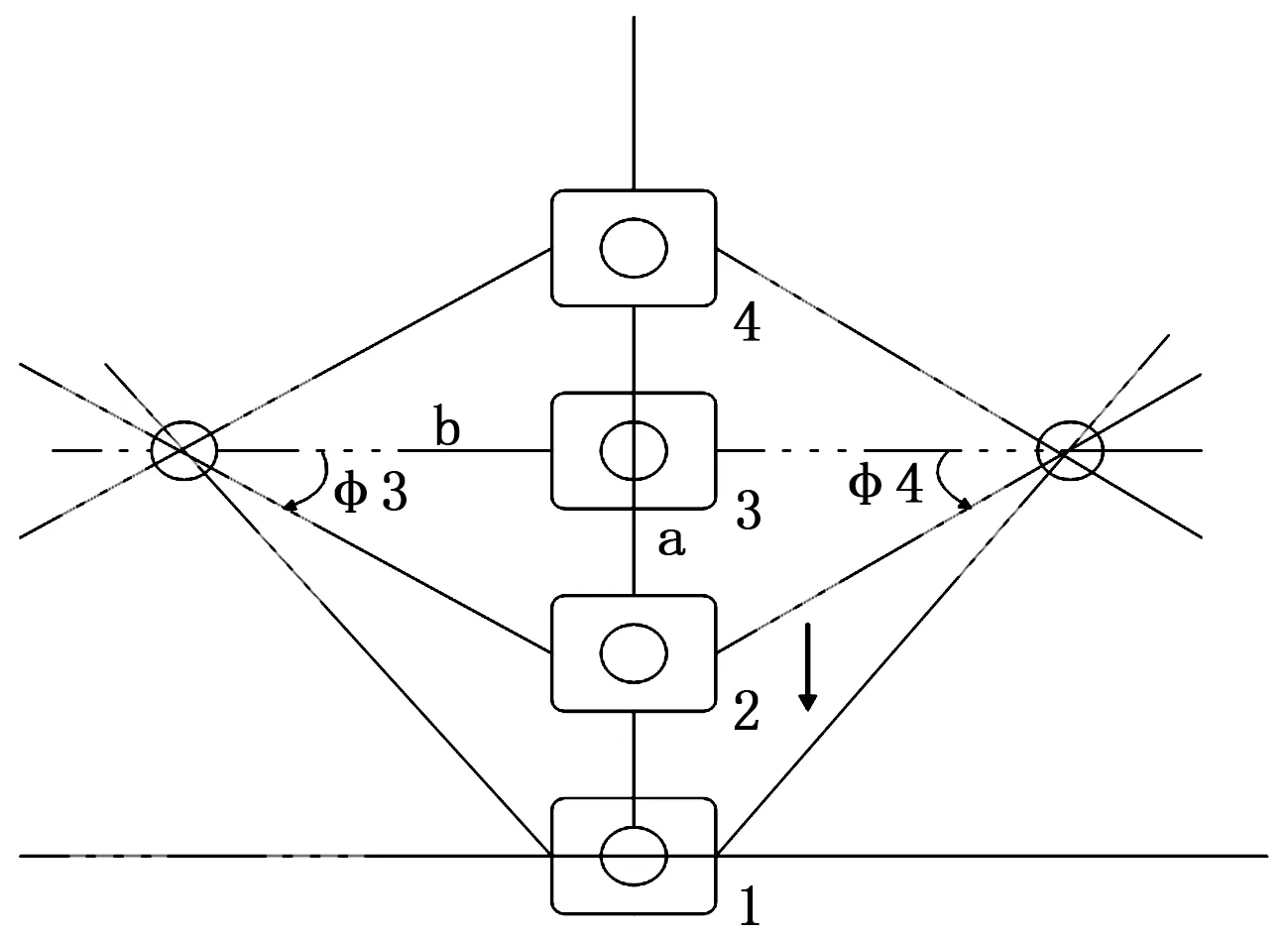
图2 双烟道张合结构示意图
通过上述张合自由度结构示意图所设计的结构,可完美的实现双烟管道的各自旋转,不断改变其夹角,直至达到二者测量值重合的位置。
制备该装置样机如图3所示。样机以丝杆步进电机驱动张合自由度的螺旋副,以实现双鼻管道的张合;采用步进电机驱动颈部扭转自由度,以实现仿人鼻的整体水平扭转;由步进电机驱动来实现鼻烟管道仰俯自由度,仿照人通过控制头部的仰俯带动鼻子的仰俯运动,以使探测器处于较为理想的烟雾吸入方位。

图3 火灾探测装置实物图
样机中3个步进电机为11HS04系列两相混合式步进电机,步距角度:1.8°,其主要特性:高精度、低转动惯量、体积小,广泛用于各种自动化设备。丝杆电机选用的是42 HS系列的两相混合式丝杆步进电机,步距角度为1.8°,精度为±5%,能使样机实现上面所设计的运动要求。
烟雾传感器选择MQ-2的烟雾探测传感器,其探测范围100 ppm~10 000 ppm。 MQ-2型烟雾传感器属于二氧化锡导体气敏材料,当与烟雾接触时,就会引起表面电导率的变化。利用这一点就可以获得烟雾的信息,烟雾浓度越大,电导率越大,输出电阻越低。可通过模拟电压输出值来反映出相对位置的烟雾浓度。
采用ZQ520-02PM型微泵吸入烟雾。微泵吸附能力为4~5 L/min,可实现快速灵敏的测量效果,其与烟雾接触的进气口可达到50 KPa的负压,通往传感器所在的封闭腔的出口可达将近100 KPa的正压,为传感器获得烟雾信息提供了可靠的吸附能力。
由于实验中,为了能够在火灾探测装置探测到火警点信息的前提下,自主的根据烟雾分布情况定位到火警点的位置,需将多位姿仿人鼻的火灾探测装置安装到移动机器人上,使得二者能够实现探测和定位的动作同时进行,根据单片机控制步进电机过程以及与轮式机器人通讯方式,设计出最佳安装方法。其具体安装如图4所示。

图4 实验平台安装示意图
3 基于探测原理制定探测方法
根据人感知到烟雾并寻找烟雾的过程,制定其工作方法。首先,当人感知到烟雾的瞬间,会不由自主的缩放鼻道加大呼吸量感知烟雾强度,判断出烟雾的来源方位;接着,通过控制头部的仰俯带动鼻子的运动,更进一步感知烟雾在此时的强度最大方位;
在上述基础上MQ-2的烟雾传感器结合仿人鼻的吸烟管道,根据实时旋转和距离、角度变化来识别空气流动和烟雾聚集死角的环境因素的影响,得出烟雾数据,与不同燃烧物火警点对应的烟雾浓度和温度进行对比,当微泵工作T后,停止工作,对左右两端的烟雾传感器数据进行比较,并得出此时烟雾的偏向,扭转或旋转鼻烟管道,再让微泵继续工作T,如此循环。
4 自主定位到火警点的方法
将火灾探测装置安装到机器人上,有火灾发生时,产生的烟雾被火灾探测装置探测到,即可触发移动机器人启动,并遵循着火灾探测器探测到的烟雾情况进行移动,不断地趋近火警点。
当空旷房间中只有一个烟源时,火灾探测装置探测到的烟雾情况有如下几种情况:
1)火灾探测装置接收到单一的烟雾。
当火灾发生后,在空旷的房间中没有干扰,全程形成的烟雾仅是单股扩散时,火灾探测装置只需根据烟雾探测传感器所作出的决策信号进行前进即可。若将移动机器人视作一个半径为R的圆,其对火警点的探测和定位的过程如图5所示。

图5 单股烟雾时的探测定位过程
其中移动步长为移动机器人在一个位置上对烟雾进行探测并做出一个相应的局部决策后,移动机器人趋近目标移动的距离dl,根据高斯分布模型可知烟雾浓度会随着与火警点间的距离变化而变化,因此移动步长不宜过大,本论文中移动步长为移动机器人的半径R。
2)火灾探测装置陷入到烟雾聚集死角。
移动机器人在室内进行火警探测与定位时,会因一些因素而致使烟雾产生聚集,如室内建筑或家具死角造成的烟雾聚集,若根据烟雾传感器检测浓度来判断是否为火警点,会有一定的误差。为解决此问题,在烟雾传感器的基础上,再分别添加一个温度传感器,其放置位置和原理在第二章中已详述。通过同时检测烟雾的浓度和温度来判别是否达到火警点的状态,进而判断是否定位火警点成功,从而避免因烟雾死角而做出误报的现象。
当进入到烟雾聚集死角时,经过温度传感器判断出此处并非火警点,则需要相应的策略使得火灾探测装置走出烟雾聚集死角,并找到正确的扩散来源,然后进行下一步的探测和定位。
若火灾探测装置进入到烟雾聚集区域,周围浓度都相等,此时无法判断移动方向,本论文针对以下两种情况做出不同决策:烟雾顺着墙壁或家具壁聚集到角落中而形成的烟雾聚集死角,探测装置因浓度相等无法判断方向时,可沿着死角壁移动,最终找到烟雾来源方向;烟雾从死角中间某一位置扩散到死角中而形成烟雾聚集死角,探测装置因浓度相等无法做出判断,沿着墙壁仍无法找出烟雾来源方位时,移动机器人返回到进入死角时的位置,使移动机器人沿着烟雾能探测到区域和烟雾不能探测到区域的界限处移动,直到探测到烟雾浓度大于死角处的浓度为止,此时烟雾来源方向可获得。其探测过程如图6、图7所示。
图6 顺着死角壁扩散形成的烟雾死角探测过程 图7 死角中间某一部位扩散形成的烟雾死角探测过程
当火灾探测装置感知到空气中的烟雾时,可启动探测装置的扭转和仰俯等动作,以使得封闭腔中的烟雾传感器能够充分的接触到此空间中的烟雾,并将此过程中探测到的数据传入控制器中,经过数组的比较来获得烟雾的分布情况,从而判别出在能感知到的空间范围中烟雾浓度最浓的地方,并将此结果通过通讯串口传给移动机器人的运动控制器,来控制机器人超着此方向移动0.5 m的距离,停止,然后继续上述的烟雾探测和引导机器人前行的动作,不断重复此操作。当探测到的烟雾浓度范围已经达到火警点的烟雾强度范围之内时,为了避免种种因素造成的误报,需进行层层排除。首先,需启动机器人以此点为圆心,向半径为1 m的圆所覆盖的范围进行探测,若烟雾浓度没有上升的现象,可排除烟雾因扩散不均匀导致的烟雾强度忽高忽低的现象;其次,将安装在封闭腔中的温度传感器在此处所显示的烟雾温度数据与火警点的烟雾温度范围进行对比,若已达到火警点的烟雾温度范围,可排除因为房间的构造和家具死角造成的烟雾聚集带来的干扰。如若上述情况都已排除,可确定此处为火警点。
5 对移动机器人定位火警点的过程进行仿真
当房间中有家具和拐角时,烟雾的扩散过程会受此情况的影响,在扩散过程中会产生烟雾聚集,当可自主移动的火灾探测装置在探测和定位火警点的过程中,会因烟雾聚集和死角的存在的干扰而误将其视作火警点,这一干扰会使其定位到火警点耗时增大,所行路径轨迹有决策不前的迹象,其具体实验情况与无死角时的路径对比情况用Sinmulink建立基于移动机器人的火灾探测装置对火警点进行距离火警点的5 m的有死角和无死角的探测和定位系统模型[6],其仿真模型如图8所示。

图8 结合移动机器人的火灾探测装置探测火警点的Simulink模型
对上述建立的系统模型,设置合理的采样时间和仿真参数,对安装有火灾探测装置的移动机器人定位室内火警点的过程进行仿真,仿真结果如图9所示。

图9 对室内火警点定位的过程仿真
由上述结果可知:可移动的火灾探测装置在探测和定位到火警点的过程中,若所在空间中由拐角或家具死角导致烟雾扩散有聚集死角的情况存在,会对探测和定位过程造成很大的影响,仿真实验中的移动机器人在探测和定位火警点中的轨迹可以看出死角存在虽然影响了对火警点的探测,但最终还是能够探测和定位到火警点,其路径轨迹表现出很好的一致性和连续性。采用上述的烟雾探测与定位方法可探测和定位到火警点。
6 结论
本论文因固定式探测烟雾装置不能实现火灾定位的需求,依据人鼻工作机制设计出仿人鼻的多位姿感烟探测装置,其包含平面张合自由度、平面整体转动自由度和上下仰俯自由度,来模仿人鼻一样的工作流程,实时检测烟雾信息.且此装置可在移动机器人的基础上实现自主定位到火警点的功能,使火灾在发生初期得到有效的防护作用,在现实生活中,该设备可在火灾发生前将其控制,具有较大的实际应用意义和应用前景。
[1] 刘子建. 基于高斯分布的火灾烟雾扩散模型[J]. 消防科学与技术, 2014(10):1205-1208.
[2] 邵君玲. 感烟感温复合探测器设计[D]. 秦皇岛:燕山大学, 2014.
[3] 蒲书缙, 杨莘元, 赵忠凯, 等. 一种复杂环境下的多传感器目标识别系统[J]. 兵工学报, 2006, 27(3): 418-421.
[4] Fabre S, Apprioub A, Briottetc X. Presentation and description of two classification methods using data fusion based on sensor management[J]. Information Fusion, 2001, 2(1):49-71.
[5] Wan Shuping. Applying interval-value vague set for multi-sensor target recognition[J]. Int J of Innovative Computing,Information and Control, 2011, 7(2): 955-964.
[6] Corke P. Robotics, Vision and Control: Fundamental Algorithms in MATLAB[M]. Springer Publishing Company, Incorporated, 2013.
ResearchonMethodofDetectionandLocationforIndoorFireWarningPointBasedonMobileRobot
Zhang Chuanchuan,Chen Guoliang, Li Xiaolong
(School of Mechanical and Electronic Engineering,Wuhan University of Technology,Wuhan 430070,China)
Fire detection technology has become one of the important means to prevent fire, At present, the frequently-used and fixed fire detection device can not detect and locate the fire point autonomously, thus, there are some limitations in the early stage of fire prevention and fire fighting. Based on the analysis of fire detection technology, this paper proposes a kind of multiposition humanoid nose fire detection device, and model machine is prepared, at the same time, tries to combine it with the mobile robot to realize the detection and location of indoor fire point.In the process of detection and location of fire point with a movable fire detection device ,a great impact will be caused on the detection and localization process,if there exists gathering corner of smoke spreading because of the dead corner or furniture corner in the space.Although the dead corner affects the detection of fire alarm point,the detection and location device can also detect and locate the fire point in the experiment.And its path show great consistency and continuity.
fire detection; mobile robot; target localization
2017-03-06;
2017-03-24。
国家自然科学基金项目(61373110)。
张钏钏(1989-),女,河南三门峡人,研究生,主要从事机器人技术方向的研究。
1671-4598(2017)09-0166-04
10.16526/j.cnki.11-4762/tp.2017.09.043
TP273
A
