无人智能技术在水库地形测量与库容计算中的应用
2017-12-05牟乃夏潘灶新李海斌
张 晨,牟乃夏,周 霞,潘灶新,李海斌,庾 鹏,杨 骥
(1. 山东科技大学测绘科学与工程学院,山东 青岛 266510; 2. 广州地理研究所,广东 广州 510070; 3. 广州市梅州水库管理处,广东 惠州 516870)
无人智能技术在水库地形测量与库容计算中的应用
张 晨1,2,牟乃夏1,周 霞2,潘灶新3,李海斌3,庾 鹏3,杨 骥2
(1. 山东科技大学测绘科学与工程学院,山东 青岛 266510; 2. 广州地理研究所,广东 广州 510070; 3. 广州市梅州水库管理处,广东 惠州 516870)
随着无人机和无人船技术的发展,将其运用于水库地形测量已成为当今水利工程的发展趋势。本文采用无人机和无人船,以及不规则三角网的库容计算方法,对梅州水库的库容进行了复核,并阐述了相应的数据获取方法和数据处理过程,以及库容的计算方法和原理。无人机和无人船等新技术的使用,提高了水库地形的获取精度及库容的计算精度,不仅降低了成本,提高了效率,而且推动了水利科技的进步,具有实践意义。
无人机;无人船;倾斜摄影;声波测深;库容计算
水利工程是我国国民经济的基础产业,对国民经济发展与人民财产安全影响重大[1]。库容作为水利工程运行管理中确定水库功能发挥的重要依据,直接影响水库的防洪安全及运营管理[2]。影响水库库容精度的因素主要有库容的计算方法和库区的地形数据[3]。传统的库容计算方法有等高线法[4]、断面法[5]和方格网法[6]等。随着测绘手段的不断进步,传统的计算方法由于工作量大、精度低等缺点[7],已无法满足库容的精度要求,目前使用最多的是基于不规则三角网(TIN)的库容计算方法[8-11]。库区的地形数据主要包括水下地形数据和水上地形数据[12],水下地形数据主要通过水下地形测量获取[13],水上地形测量主要通过人工实测获取[14-15],工作量大且实施困难。
无人机技术由于其灵活、快速,以及不受地形、环境等条件制约的特点,被广泛应用于气象监测、土地利用现状调查、大比例尺测绘等方面,且均取得了较好的成果[16-17]。无人船具有稳定、精准、智能、高效等特点,也逐步运用于水域勘测[18]。将无人机和无人船运用于水库地形测量,可以很好地解决水库等水利工程由于区域覆盖面广、环境复杂等造成的测量工作实施困难、测量范围不全面等问题[19-20]。本文以惠州市梅州水库为例,采用无人机和无人船等先进技术获取水库的地形数据,并采用不规则三角网的库容计算方法,实现梅州水库库容的复核,以期为水利工程全面、高效的地形测量和水库库容计算提供依据。
1 研究区概况
梅州水库位于增江支流永汉河上游南昆山脚下,是一座以防洪为主,结合供水、灌溉、发电等综合利用的中型水利工程,是治理增江的重点防洪工程之一。工程始建于1975年,经过几十年的变化,库区经历了淤积、岸边崩塌等地质现象,建库前所测定的库容量已不能反映现实库容量的变化,这给洪水分析、防洪决策等工作带来了安全隐患。
梅州水库涵盖高山、水库、村镇、山地、河流等多种地貌,下游60多平方千米的洪泛区涵括永汉镇、河口洪泛区、广河高速等,地形地貌复杂,采用传统方法获取地形数据是一项艰巨、复杂的工作,存在监测工作实施困难及监测不全面等难题。基于微型无人机倾斜摄影技术与无人船声波测深技术的水库地形获取方法,为解决上述问题提供了技术快捷、经济可行的方式。
2 研究方法
水库地形测量分为水下地形测量和水上地形测量两部分。水下地形测量采用无人驾驶水下地形测量船和声波测深设备,对梅州水库集雨面积进行水深测量,获取测区水下地形分布;水上地形测量采用固定翼无人机搭载尼康D810全画幅专业数码相机,对梅州水库及下游洪泛区共200 km2区域进行彩色数码航空倾斜摄影,获取测区水上地形分布。其中,尼康D810的有效像素为3635万像素,镜头焦距为35 mm,像元尺寸为0.004 88 mm。
水库库容是某一水位以下或两水位之间的蓄水容积,本文利用不规则三角网(TIN)的库容计算方法,以实现库容的高精度计算。技术路线如图1所示。
3 水库库容计算
3.1 无人机影像数据获取
无人机航摄作业主要包括航摄设计与飞行、像片控制点测量和数据处理。为保证飞行质量,作业前首先进行实地勘探,了解测区的地形和天气等情况,最终确定了航摄的季节和时间为8—9月晴朗天气的9:00—16:00,并确定了航飞的范围和路线,如图2所示。
为保证数据质量,在航摄飞行中要尽量使飞机姿态平稳。测区总航程为659.50 km,依据测区海拔高度差将测区分为两块,对其进行6组航摄飞行,其中航向重叠率为80%,旁向重叠率为60%,地面分辨率为20 cm。在6组影像中,选取无云且质量好的数据组成如图2所示的航摄数据,其中每一种颜色代表一组航飞数据,以避免云层和阴影等的影响,保证影像质量。
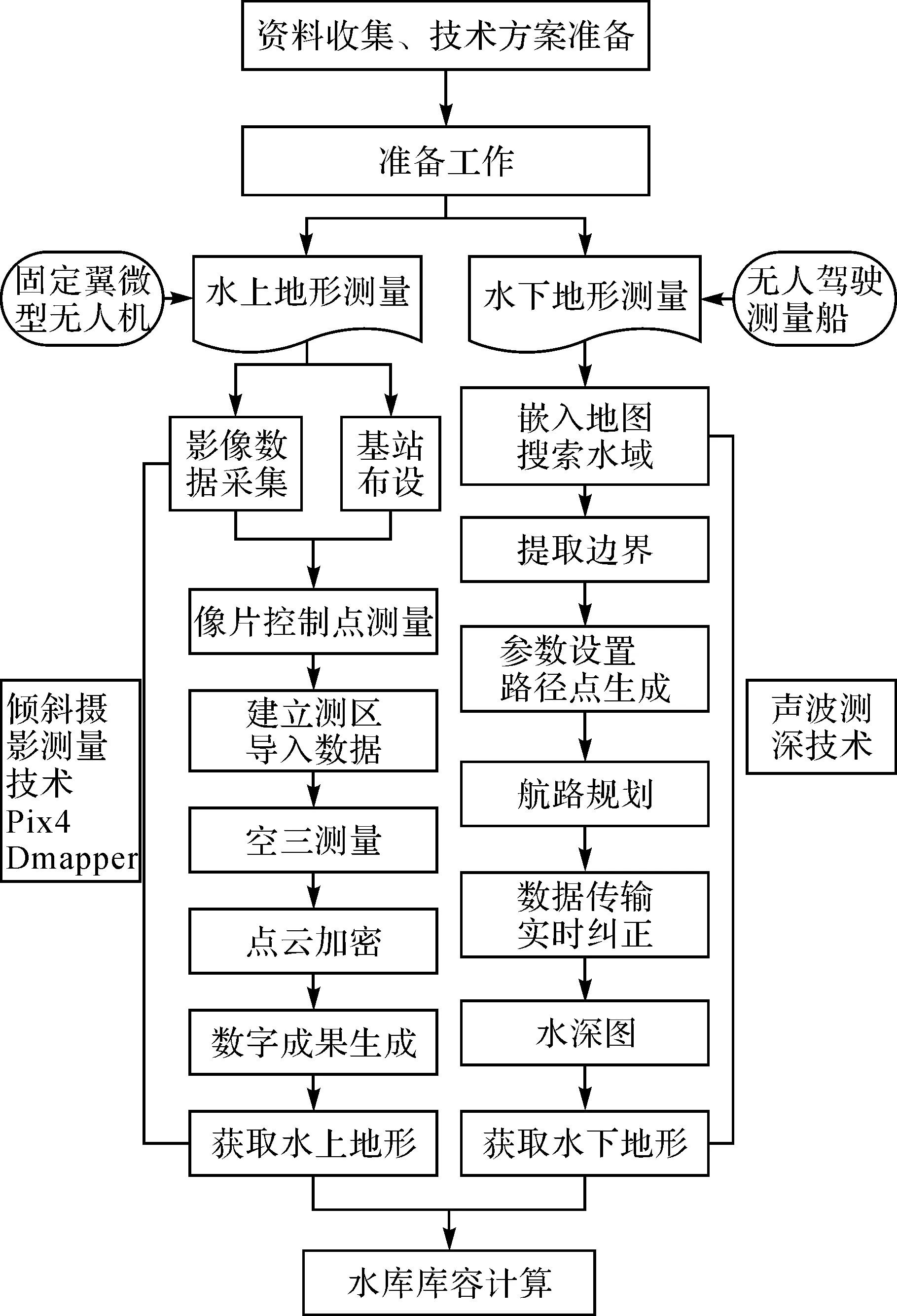
图1 技术路线

图2 航摄范围和航飞路线
3.2 全自动影像数据处理
无人机遥感影像的数据处理主要包括像片控制点测量、空中三角测量、影像校正和数字成果生成等内容。像片控制点采用网络GPS RTK技术施测,测量得到的数据为平高点,每个测区都包含两个以上的多余观测控制点,分布如图3所示。

图3 像控点分布
空中三角测量主要包括内定向、相对定向、绝对定向和加密点坐标计算,本文采用的软件为Pix4Dmapper。为提高精度,在Pix4Dmapper中输入数字航测仪的检定报告进行系统误差改正,输入无人机记录的高精度POS数据进行航摄姿态的校正,最终可以得到梅州水库两块测区的DSM、DOM、三维点云及质量报告分析。
质量报告分析主要包括区域网空三误差、自检校相机误差和控制点误差。梅州水库两块测区主要的质量报告分析见表1。局部成果如图4所示。
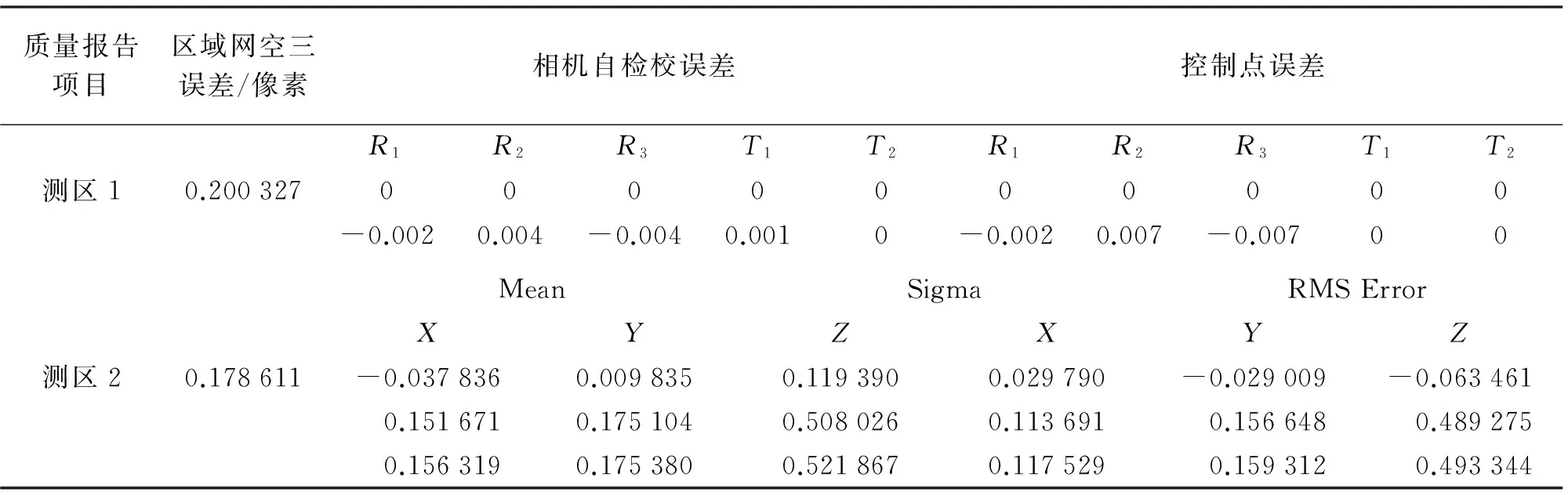
表1 质量分析报告

图4 梅州水库DOM和DSM(局部)
3.3 无人船水深数据获取
梅州水库水域面积较大,水库边界复杂,为简化测量,提高路径规划的科学性和准确性,把该水库划分为9个子区域,通过声波测深设备与微型无人船系统集成,实现路径规划、自主导航、姿态校正、波浪测量、水下地形自动勘测等功能,其中数据传输通过以太网或无线电发送路径数据至无人船控制器,实现路径规划和路径控制的目的。
水下地形数据的处理需要结合测深仪电子图像数据,对所有水深数据进行校对,以剔除或修正异常水深点,去除粗差。水下地形的高程是由水位减去测深仪所测得的水深求得的,利用高程可以得到水下全覆盖水深图,获取测区水下地形分布,水深图如图5所示。

图5 梅州水库水下全覆盖水深图
结合固定翼微型无人机倾斜摄影技术、Pix4Dmapper全自动影像处理技术和无人船声波测深技术,建立了梅州水库库区约6 km2范围内的地形三维模型,其中最大水深测量误差<0.1 m,水平定位误差为10 cm,高程定位精度为20 cm。
3.4 水库库容计算
TIN是基于矢量数字地理数据的一种形式,通过将一系列具有X、Y和Z值的结点组成三角形构建而成,形成这些三角形的插值方法有很多,本文利用的是Delaunay三角测量方法,基本原理如下:
设平面域上有n个节点,根据Delaunay三角形的几何对偶Voronoi图进行划分,Voronoi图会将平面分成n个凸多边形,每个凸多边形内的所有点到结点的距离都要比到其他节点的距离短,如下式
(1)
式中,S(Pi)是Pi与其他n-1个节点的连线的垂直平分线所形成的n-1个半平面的交集。一般情况下,3个Voronoi多边形共同拥有Voronoi图的一个顶点,每个多边形内有且仅有一个节点,连接这些共顶点的多边形内的节点就可以形成一个Delaunay三角形,所有这样的三角形的集合就是Delaunay三角剖分。构成的Delaunay三角形是唯一的,没有任何点位于三角形的外接圆内部且所有三角形的最小内角都被最大化了。
ArcGIS集成了构建TIN的算法,利用“栅格转TIN”工具可以简单、快速、准确地构建TIN模型,然后根据实际情况对结果进行修改,使TIN模型更加合理。构建的TIN模型如图6所示。根据构建的TIN模型,采用“表面体积”工具,可以快速计算出所需水位所对应的水库库容。
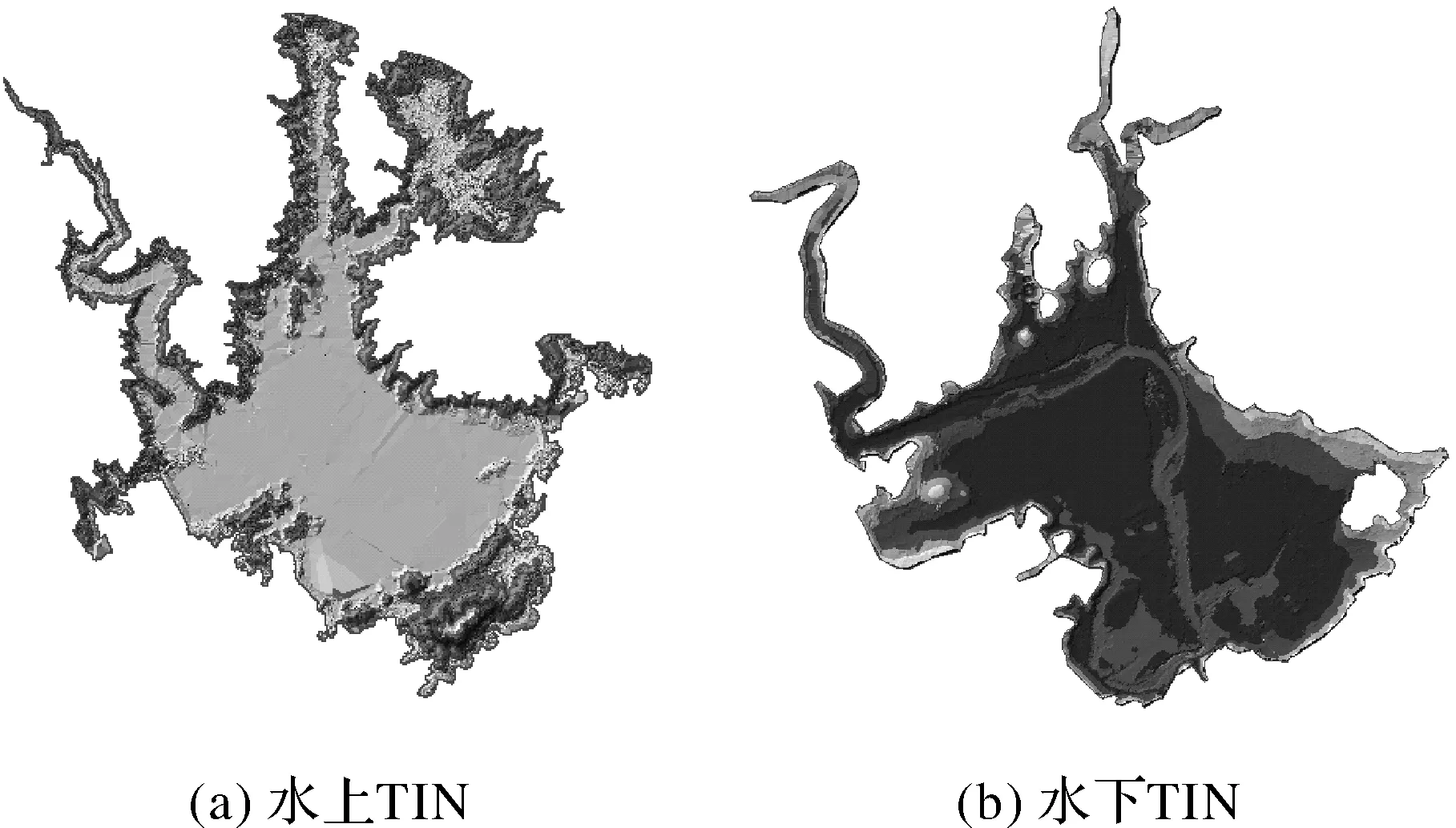
图6 梅州水库的TIN模型
为了准确地绘制梅州水库的库容曲线,为防洪预测提供科学依据,本文以0.01 m为间隔,以当时水位44.7 m为分界线,根据水上和水下地形对校核洪水位56.74 m以下的库容进行计算,得到的部分结果见表2。然后利用SPSS软件对数据进行拟合,根据拟合的精度得到三次曲线最为拟合(水下R2=1.000,水上R2=0.999),拟合结果如图7所示。根据得到的库容曲线可以快速定位任意水位所对应的水库库容和淹没面积,为防洪预测提供科学依据。

表2 库容计算结果(部分)

图7 库容曲线
4 结 论
(1) 本文采用的基于无人机与无人船的水库地形测量方法,具有精度高、速度快、时间灵活、成本低、效率高等优点,是一种简单有效的库区地形获取方法。该方法已成功运用于梅州水库水利工程立体化监测,具有实用意义。
(2) 数据处理利用数字航测仪检定报告、无人机POS数据及像控点进行系统误差和影像校正,保证了数据成果的质量和精度。
(3) 库容数据采用SPSS软件进行拟合,根据拟合的精度得到三次曲线最为拟合(水下R2=1.000,水上R2=0.999)。
(4) 从库容曲线图可知,当时水位44.7 m的计算库容与已有的准确库容数据较为接近,且水下与水上库容曲线衔接完好,增长幅度没有异常值。由此可见,通过该方法得到的数据精度较高。
(5) 计算得到的两个关键点(当时水位44.7 m和校核洪水位56.74 m)的水库库容都大于设计值,说明梅州水库库容增大了,主要原因可能是过去的地形测量误差比较大。
[1] 李刚.水利工程管理维护问题研究[J].中国水运月刊,2011,11(7):125-126.
[2] 马文祥.基于GIS的中小水库地形和库容测量实践[J].测绘通报,2006(8):66-68.
[3] 童思陈,周建军.河道型水库动防洪库容近似计算方法[J].水力发电学报,2003(4):74-82.
[4] 蔡守华.小型水库兴利库容及灌溉面积复核计算方法[J].中国农村水利水电,2010(11):69-71.
[5] 陈晓玲,陆建忠,蔡晓斌,等.基于空间信息技术的堰塞湖库容分析方法研究[J].遥感学报,2008,12(6):885-892.
[6] 张红梅,赵建虎.水库库容和淤积量精密测量及计算方法研究[J].武汉大学学报(工学版),2003,36(5):26-29.
[7] 袁勇.基于DEM库容计算及可视化研究[D].武汉:武汉大学,2004.
[8] 刘东,李艳.基于遥感技术的鄱阳湖面积库容估算[J].遥感信息,2012(2):57-61.
[9] 牟乃夏,刘文宝,王海银,等.ArcGIS 10地理信息系统教程——从初学到精通[M].北京:测绘出版社,2012.
[10] TKH T,CG A.2D Finite Element Mesh Generation by Medial Axis Subdivision[J].Advances in Engineering Software & Workstations,1991,13(5-6):313-324.
[11] 周秋生,王延亮,马俊海.对TIN模型边界生成算法的研究[J].测绘通报,2005(5):30-32.
[12] 王守彬,王新洲,刘晓东.GPS-RTK与数字测深集成技术在水下地形测量中的应用[J].测绘信息与工程,2004(9):30-31.
[13] 赵建虎,张红梅.水下地形测量技术探讨[J].测绘地理信息,1999,24(4):22-26.
[14] 汪志明,徐亚明,张洪波,等.差分GPS RTK技术在富春江水库库容测量中的应用[J].测绘地理信息,2003,28(6):7-8.
[15] 杨中华,陈琳.基于GIS的水库库容测量方法的研究与实践[J].测绘通报,2002(11):28-30.
[16] 毕凯,李英成,丁晓波,等.轻小型无人机航摄技术现状及发展趋势[J].测绘通报,2015(3):27-31.
[17] 汤坚,杨骥.无人机倾斜摄影技术在特高压输电线路路径优化中的应用研究[J].南方能源建设,2015,2(S1):203-206.
[18] 金久才,张杰,马毅,等.一种无人船水深测量系统及试验[J].海洋测绘,2013,33(2):53-56.
[19] HUANG R Q,PEI X J,FAN X M,et al. The Charac-teristics and Failure Mechanism of the Largest Landslide Triggered by the Wenchuan Earthquake, May12, 2008, China[J].Landslides,2012,9(1):131-142.
[20] 冯家莉,刘凯,朱远辉,等.无人机遥感在红树林资源调查中的应用[J].热带地理,2015,35(1):35-42.
ApplicationofUnmannedIntelligentTechnologyinTopographicSurveyingandCapacityCalculationofReservoir
ZHANG Chen1,2,MOU Naixia1,ZHOU Xia2,PAN Zaoxin3,LI Haibin3,YU Peng3,YANG Ji2
(1. College of Geomatics, Shandong University of Science and Technology, Qingdao 266510, China; 2. Guangzhou Institute of Geography, Guangzhou 510070,China; 3. Guangzhou Meizhou Reservoir Management Office, Huizhou 516870,China)
With the development of UAV and unmanned boat technology, its application to reservoir topography has been becoming the development trend of water conservancy project. In this paper, the unmanned aerial vehicle (UAV) and unmanned boat, as well as the calculation method of irregular triangulation are used to calculate the capacity of Meizhou reservoir. And the data acquisition method and data processing process, as well as the calculation method and principle of storage capacity are elaborated. The use of new technologies, such as unmanned aerial vehicles and unmanned boat, improves the acquisition accuracy of reservoir terrain and the calculation accuracy of storage capacity, which not only reduces the cost, improves the efficiency, but also promotes the progress of water science and technology, with practical significance.
unmanned aerial vehicle; unmanned boat; tilting photography; sonic sounding; capacity calculation
张晨,牟乃夏,周霞,等.无人智能技术在水库地形测量与库容计算中的应用[J].测绘通报,2017(11):72-76.
10.13474/j.cnki.11-2246.2017.0351.
P23
A
0494-0911(2017)11-0072-05
2017-05-04
广州市水务科技项目(MZSK-2016-01);广东省水利科技创新项目(2015-14);广州市产学研协同创新重大专项(201604016047);广东省科学院实施创新驱动发展能力建设专项资金(2017GDASCX-0601;2017GDASCX-0101);山东省自然科学基金(ZR2016DM02)
张 晨(1993—),女,硕士,主要研究方向为地理信息系统与遥感。E-mail:1024029982@qq.cm
牟乃夏
