宝马双离合器变速器电控系统介绍
2017-12-05陈晓霞周晓飞
陈晓霞,周晓飞
(1. 河北省机电工程技师学院,河北 张家口 075000;2.石家庄创业汽车技术研究中心,河北 石家庄 050000)
宝马双离合器变速器电控系统介绍
陈晓霞1,周晓飞2
(1. 河北省机电工程技师学院,河北 张家口 075000;2.石家庄创业汽车技术研究中心,河北 石家庄 050000)
1 双离合器变速器简介
宝马双离合器变速器(DKG)用于E90M、E92M、E93M等车型上,其变速器型号为GS7D36SG,它结合了顺序挡换挡变速器(SMG)与自动变速器的优点。与SMG一样,它可以在自动换挡模式“前进挡”和手动换挡模式“顺序换挡”下使用。双离合器结构示意如图1所示。

图1 双离合器内部结构
变速器控制由DKG电子系统负责,功能执行由DKG液压系统负责。这些系统组成一个机械电子模块且集成在变速器内。
双离合器变速器特点如下:①液压操纵式双离合器(所谓的湿式离合器);②集成式机械电子模块,由DKG电子系统和DKG液压系统组成;③内部直接润滑;④特殊机油冷却循环回路;⑤新型M DKG选挡开关(M DKG,名称前的字母M区分普通DKG特殊信息和MDKG特殊信息);⑥自动驻车锁;⑦长度针对DKG调整的传动轴(较短);⑧全可变M差速器锁,传动比改为3.154(非DKG为 3.846),壳体端盖进行了调整。
2 双离合器变速器工作原理
从结构上看,DKG由两个子变速器构成,每个子变速器都带有一个离合器。离合器1与子变速器1连接,离合器2与子变速器2连接。DKG工作原理简图如图2所示。

图2 DKG 工作原理简图
子变速器1包含挡位 1/3/5/7/R,子变速器2包含挡位2/4/6。这意味着无论是换高挡还是换低挡(R挡除外),下一个挡位始终位于另一个子变速器上。
以当前挡位(例如在子变速器1上)加速期间,变速器提前挂入位于子变速器2上的下一个挡位。随后进行换挡时,可以通过有针对性地控制离合器在牵引力不中断的情况下,迅速将驱动力从子变速器1传递到子变速器2。因此在提供牵引力和换挡舒适性方面优势非常明显。同时,在保留了手动变速器优点(例如与发动机直接连接)的情况下,DKG结合了自动变速器牵引力和舒适性方面的优点。
3 车载网络
3.1 车载网络接口
图3为M DKG变速器电子控制系统与M选挡开关的联网情况和至E9*M3车载网络的接口示意图。
3.2 车载网络概览
E9xM3车载网络增加了M双离合器变速器方面的功能,车载网络概览见图4。
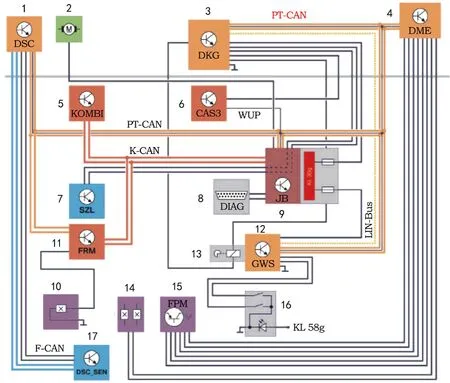
图3 M DKG 车载网络接口系统电路图

图4 E9xM3 M DKG车载网络概览
4 机械电子模块
4.1 机械电子模块结构
集成在DKG变速器壳体内的机械电子模块,由DKG电子系统和DKG液压系统组成。
换挡拨叉轴行程传感器直接固定在DKG电子系统上(图5b)。上部行程传感器内集成有用于内部输入轴1和2的转速传感器。驻车锁传感器集成在倒数第2个行程传感器内(图5b)。

图5 机械电子模块
8个挡位通过4个液压缸和4个独立换挡拨叉轴挂入。换挡拨叉轴位置由换挡拨叉轴传感器以非接触方式探测(图6)。

图6 DKG系统机械电子模块
4.2 传感器系统和通信
4.2.1 传感器
双离合器变速器包含带转动方向识别功能的变速器轴1转速传感器、不带转动方向识别功能的变速器轴2转速传感器、离合器1和2的离合器油压力传感器、3个温度传感器(1个用于喷出的离合器油,2个冗余温度传感器用于DKG电子系统)、4个用于传输换挡拨叉轴位置的线性传感器、1个双(冗余)驻车锁传感器等传感器,安装在变速器内,传感器信号直接发送至DKG电子系统内,其工作原理如图7所示。

图7 DKG工作原理图(带离合器、轴、DKG电子系统和传感器)
系统还通过一个复杂的温度模型计算油底壳温度,并借助离合器喷油温度和DKG电子系统温度进行验证。
4.2.2 转矩干预
4.2.3 LIN总线模块
为了实现与选挡开关(GWS)的冗余通信,除了PTCAN模块外,DKG电子系统内还有一个LIN总线模块。
5 M选挡开关(M GWS)
5.1 选挡开关
E9x M3的双离合器变速器有1个M专用选挡开关。其操作与带顺序换挡M变速器(SMG)的E6x M5/M6类似。
M GWS由带显示的选挡杆、带控制单元的壳体和以电气方式连接的外部驾驶逻辑模式选择按钮组成,DKG M选挡开关见图8。
5.2 选挡杆:显示和功能
1.3.6 PPCI术后3月,患者复查超声心动图,了解心功能情况,记录左室射血分数(left ventricle ejection fration,LVEF);观察LVEF>50%的发生率。
选挡杆上的换挡示意/行驶模式/选挡显示与带SMG的E6x M5/M6类似。区别如下:E92 M3选挡杆不再卡止在2个选挡杆位置N和R,而是只卡止在R位置。M GWS 选挡杆为单稳态。这意味着向前、向后、向右或向左移动后选挡杆自动返回其初始位置,倒车挡除外。在此选挡杆向左侧卡止在选挡杆位置R处,必须由驾驶员移回到初始位置。根据选挡杆操纵情况和行驶模式,换挡示意/行驶模式/换挡显示背景呈红色。

图8 DKG M选挡开关(M GWS)
这种显示方式能准确显示当前选择的行驶模式和换挡可能性。
该显示由定向照明(用于照亮换挡)和功能照明组成。处于不同位置的红色LED显示当前选择的行驶模式和换挡可能性。M GWS内的功能照明由DKG电子系统控制。
系统监控功能照明。为此DKG电子系统读取显示信息并将其与所要求的显示内容进行对比。
为了实现与DKG电子系统的冗余通信,除PT-CAN总线模块外,M GWS内安装了一个LIN总线模块。
5.2.1 选挡杆基本位置(单稳态)
除了卡止位置R外,选挡杆始终位于单稳态选挡杆基本位置。起动发动机时,驻车锁始终处于挂入状态且离合器处于无压力分离状态。无论在哪个挡位下关闭了发动机,是否踩下/启用了脚制动器,都可以起动发动机。在选挡杆基本位置处选挡杆显示背景呈红色(图9a)。
5.2.2 行驶模式前进挡D(自动换挡模式)
首次将选挡杆短促向右推移时,就会启用前进挡D,此后 DKG 在自动换挡模式下自动换到第1或第2挡。除了选挡杆基本位置外,在选挡杆显示内D/S背景也呈红色(图9b)。
5.2.3 行驶模式S(顺序换挡模式)
第2次短促向右推移时,DKG从自动换挡切换到顺序换挡模式S。
每向右推移选挡杆1次,DKG就会在顺序换挡与自动换挡模式之间切换1次。如果在 2 挡至 6 挡下行驶时选择行驶模式S,则除D/S外,符号“+”和“-”背景也呈红色(图9c)。
现在驾驶员可以通过向后操纵选挡杆换到较高一挡,或通过向行驶方向操纵来换低挡。驾驶员给出的换挡要求始终在允许的转速范围内执行。达到最高转速时不会自动换高挡(例外:快速起步控制)。
只要在自动换挡模式下向前或向后推移选挡杆,或者操作转向盘上的换挡翘板开关,M DKG就会切换到顺序换挡模式。
在顺序换挡模式下有2个附加显示,一个用于1挡,另一个用于7挡。在1挡下符号“-”的背景不再为红色,因为此时无法继续换低挡(图9d)。
在7挡下符号“+”的背景则不再为红色,因为此时无法继续换高挡(图9e)。
5.2.4 空挡N
驾驶员也可以有意识换到空挡,方法是短促向左推移选挡杆。在选挡杆显示内符号N背景呈红色(图9f)。在自动洗车设备内洗车时需换到空挡。
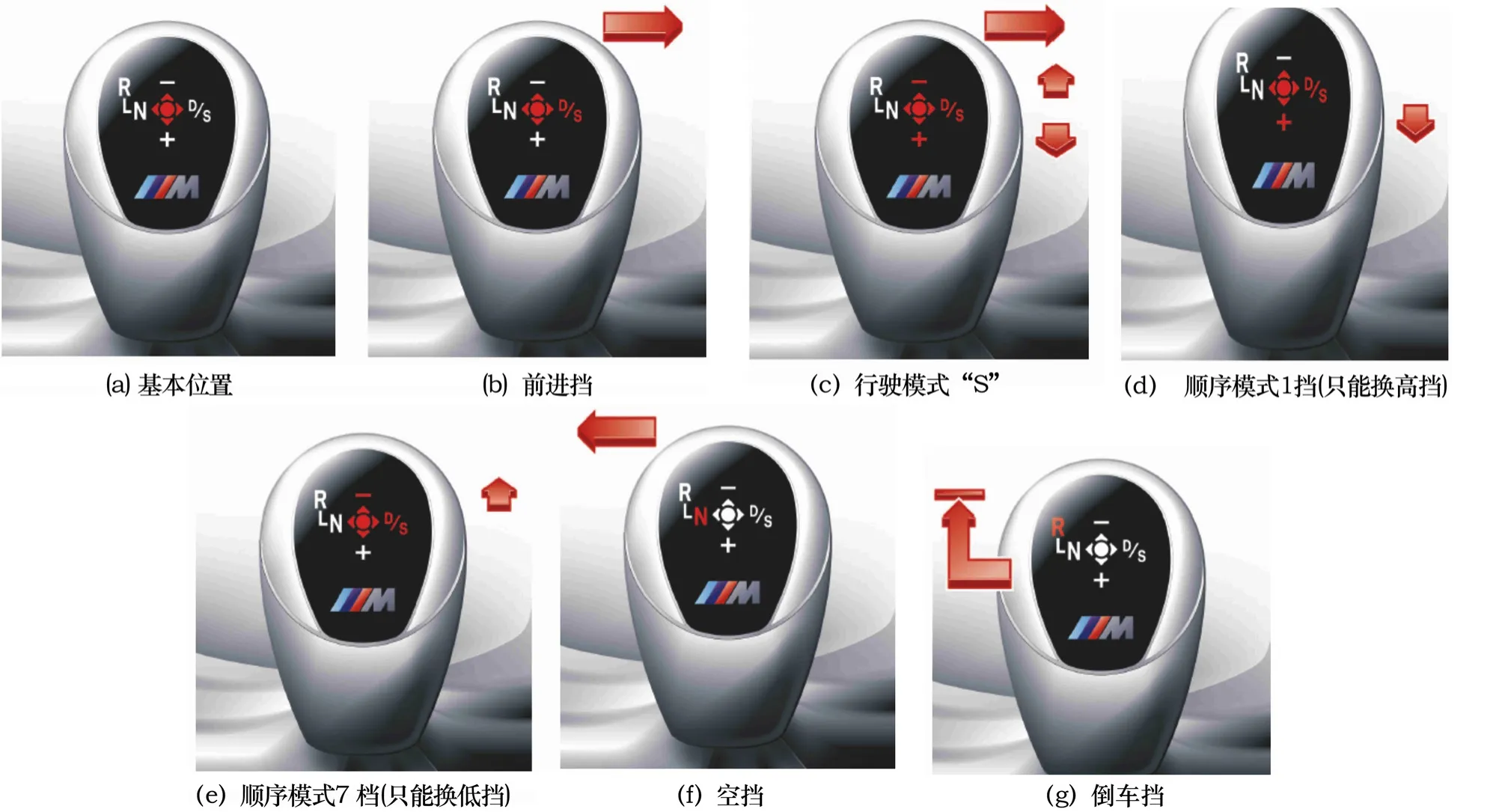
图9 D KG GWS各挡位示意图
5.2.5 选择挡位倒车挡“R”
挂入倒车挡后,在这个卡止位置下符号R背景呈红色(图9g)。如果处于卡止的选挡杆位置R时起动发动机,选挡杆基本位置按1 Hz频率以红色闪烁。其目的是提醒驾驶员,倒车挡处于挂入状态,驾驶员必须将选挡杆移回到基本位置,以便选择一个新挡位或行驶模式。
5.3 驾驶逻辑模式选择
其操作和显示与 SMGⅡ和SMGⅢ相同。通过驾驶逻辑模式选择开关,可选择顺序换挡模式下的6个换挡模式和自动换挡模式下的5个换挡模式。所选换挡模式在组合仪表中以条形图方式显示。
在顺序换挡模式下会影响换挡速度,因此直接影响换挡软硬度。只有停用DSC功能后才能选择第6个换挡模式。
此后可以使用快速起步控制功能。在自动换挡模式下,会影响换挡时机和换挡速度。较高的换挡模式意味着较高的换挡转速和换挡速度。换挡时机在很大程度上还取决于加速踏板位置和移动速度。
5.4 传感器系统
选挡杆位置由霍尔传感器以非接触方式探测。传感器通常为2~4组,其布置如图10所示。总共14个霍尔传感器(GWS SMG Ⅱ4,GWS SMG Ⅲ8)。因此可保证最大的故障处理和诊断能力。
5.5 DKG的接口

图10 M GWS 选挡杆位置霍尔传感器布置
为确保始终可供使用,选挡杆位置信号通过PTCAN和LIN总线进行传输。因此即使2个通信线路中的一个失灵时,也可以将信号发送给DKG。M GWS通过PTCAN唤醒导线上的高电平来唤醒。M GWS本身不具有主动唤醒能力。只要在PT-CAN上或LIN总线上总线通信处于启用状态,选挡杆上的显示就会处于启用状态。
6 电气故障
1)变速器内部故障/传感器、阀门信号不可信和超出限值,如表1所示。
2) 制动器、驻车锁和选挡开关(GWS)有故障/不可信,如表2所示。
3) 无效总线信息如表3所示。

表1 变速器内部故障/传感器、阀门不可信和超出限值
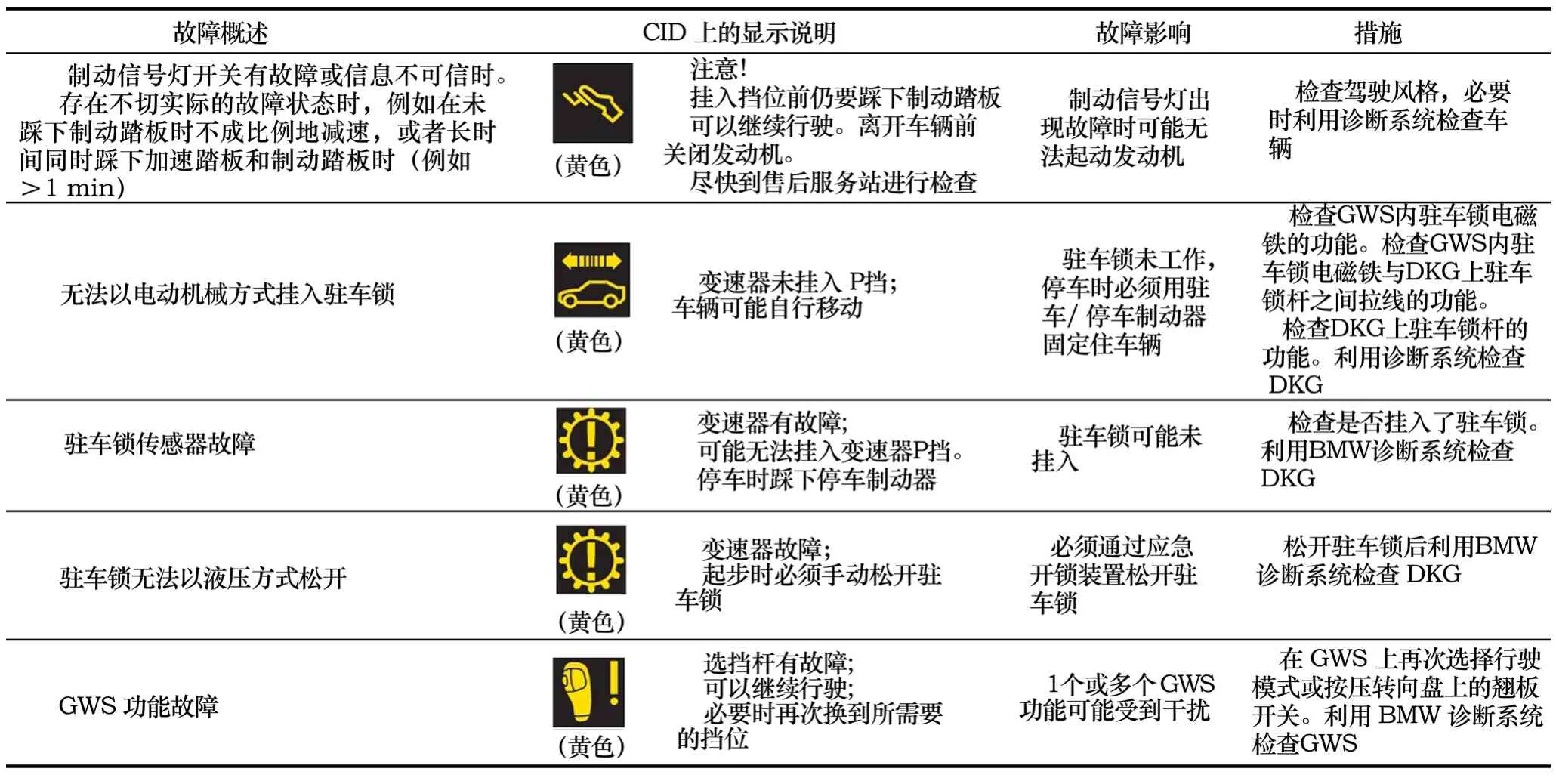
表2 制动器、驻车锁和选挡开关(GWS)有故障/不可信

表3 无效总线信息
(编辑 心 翔)
征集汽车智能技术稿件
当前全球汽车行业正处在工业4.0时代,以智能制造为主导,通过充分利用信息通讯技术和网络空间虚拟系统和信息物理系统相结合的手段,将制造业向智能化转型。
早在20世纪70年代,美欧等发达国就已经开始进行无人驾驶智能汽车的研究,进入21世纪后,智能汽车的前2个层次“辅助驾驶技术”和“半自动驾驶技术”已经得到广泛应用,并成为提升产品档次和市场竞争力的重要手段。辅助驾驶技术包括自主式辅助驾驶技术和协同式辅助驾驶技术两种,通过警告让驾驶员防患车祸于未然。其中,包括前碰撞预警FCW、车道偏离预警LDW、车道保持系统LKS、自动泊车辅助APA等在内的自主式辅助驾驶技术已经得到广泛应用,处于普及推广阶段,并由豪华车下沉至B级车。汽车辅助驾驶技术成为获取E-NCAP四星和五星的必要条件。在美国、欧洲、日本等汽车发达国家和地区,基于车联网V2I/V2V技术的协调式辅助驾驶技术正在进行实用性技术开发和大规模试验场测试。半自动驾驶技术在高端车上逐渐获得应用,比如已经获得广泛应用的自适应巡航控制系统ACC。
世界汽车巨头们正致力于第3层次“高度自动驾驶技术”的实用化研发和产业化,即将实现量产上市。沃尔沃将率先量产全球第一个自动驾驶技术——堵车辅助系统。该系统是自适应巡航控制和车道保持辅助系统的集成与延伸,它可以使汽车在车流行驶速度低于50 km/h的情况下,自动跟随前方车辆行进。此外,奥迪、凯迪拉克、日产、丰田等都计划推出诸如自动转向、加减速、车道引导、自动停车、自适应巡航控制等技术的汽车,它们大多属于第3层次的智能驾驶技术。
我国从20世纪80年代开始着手无人驾驶汽车的研制开发,虽与国外相比还有一些距离,但也取得了阶段性成果。国内中国科学院合肥研究院、清华大学、国防科技大学、上海交通大学、西安交通大学、吉林大学、同济大学、天津军交学院、中国汽车技术研究中心等都参与过无人驾驶汽车的研究项目。
《汽车电器》将重点推出汽车智能技术版块,期望广大的科研人员能够就智能传感技术、智能公交系统、影音娱乐、车辆防盗、车辆追踪、多车互动、异常预警、远程指导等方面踊跃投稿,展示最新科研成果,与同行进行技术交流,共同推动我国智能汽车的全面发展。稿件需密切联系实际,深入浅出,全文字数含图表控制在8 000字以内。此类稿件优先刊登。
投稿信箱:qcdq@qcdq.cn 邮件主题注明“智能技术”
咨询电话:0731-82798408 http://www.qcdq.cn
《汽车电器》杂志社
U463.5
B
1003-8639(2017)11-0077-06
2017-01-04;
2017-01-22
陈晓霞,女,讲师,硕士,从事电子电工方向教学与研究工作;周晓飞,男,石家庄市青年岗位能手,从事汽车应用与维修技术研究。