抓持-旋切式欠驱动双指手葡萄采摘装置设计与试验
2017-12-04尹建军陈永河刘继展
尹建军 陈永河 贺 坤 刘继展
(江苏大学现代农业装备与技术教育部重点实验室, 镇江 212013)
抓持-旋切式欠驱动双指手葡萄采摘装置设计与试验
尹建军 陈永河 贺 坤 刘继展
(江苏大学现代农业装备与技术教育部重点实验室, 镇江 212013)
针对葡萄的柔性无损采摘要求,基于欠驱动原理和抓持-旋切协同工作方式设计了一种欠驱动双指手葡萄采摘装置,一个电动机通过连杆机构驱动双指四指节手爪从果实中部接近并包络抓取葡萄,复合在双指手上的旋切部件摆动-伸缩带动圆盘刀切断果梗,实现果实与果梗分离。基于此设计思路,首先通过葡萄赤道面直径分析确定了欠驱动手指机构指节尺寸与转角范围,然后通过建立欠驱动手指机构静力学模型,基于传力最优和接触力均布的要求确定了驱动连杆尺寸,结合接触力分析和葡萄挤压破裂试验,获得抓持2 kg葡萄不发生损伤的最大接触力为20 N,再通过手指机构静力学模型求解获得驱动电动机的推力,从而指导驱动电动机的选型。设计了葡萄采摘装置控制系统,通过指节处压力传感器实时反馈接触力实现最大接触力的有效控制。采用加减速梯形控制方式实现了旋切部件运动,圆盘刀转速1 200 r/min可对果梗有效切断。对赤道面直径95~200 mm的葡萄进行50次采摘试验,试验结果表明该装置的采摘成功率为100%,果实挤伤率为5.2%,不考虑视觉定位葡萄与果梗的耗时,完成一次抓持-旋切动作平均耗时29.4 s。
葡萄; 果实采摘; 末端执行器; 欠驱动手爪; 接触力控制
引言
末端执行器是果蔬采摘机器人核心装置之一,通常依靠力封闭进行果实抓取,与果实形成的接触力对果实抓取成功与损伤有直接影响[1-2]。因此,基于接触力控制的末端执行器设计对提高果实采摘成功率和减小机械损伤具有重要意义。
由于番茄、苹果、黄瓜、西瓜、猕猴桃、荔枝、草莓等果蔬的生长特点和采摘要求不同,末端执行器的采摘方式也不同,设计的末端执行器的结构形式也存在差异[3-13]。不管是哪种形式的末端执行器,通过果实与夹持器之间的作用力控制来实现无损采摘,是果蔬采摘末端执行器研究的关键技术之一。为指导末端执行器设计与损伤控制,研究了通过夹持碰撞模型[14]与基于有限元方法来确定果实受挤压后的应力与变形关系[15]。针对不同结构的末端执行器提出了多种抓取果实的力控制方法[16-20],并无涉及成簇生长的葡萄串果采摘装置及其接触力控制研究。
本文针对葡萄的柔性无损采摘要求,考虑葡萄垂直悬挂的生长特点,基于欠驱动原理和抓持-旋切协同工作方式设计一种欠驱动双指手葡萄采摘装置,欠驱动双指四指节手爪从中部接近并包络抓取葡萄,复合在双指手上的旋切装置摆动-伸缩带动圆盘刀切断果梗,实现果实与果梗分离。从抓取果实大小和最大接触力控制的角度,设计采摘装置的机械、力感知和控制系统,研制样机进行葡萄采摘试验。
1 抓持-旋切式欠驱动双指手葡萄采摘装置总体设计
如图1所示,考虑葡萄垂直悬挂的生长特点,抓持-旋切式欠驱动双指手葡萄采摘装置主要由欠驱动双指手、旋转伸缩部件、旋切部件、连接卡盘和RealSense实感相机组成,其工作原理为:该装置通过连接卡盘与机械臂的腕部连接,利用RealSense实感相机对果实与果梗精确定位,采摘装置被机械臂导引到果实位置,双指四指节手爪从果实中部接近并包络抓取葡萄,复合在双指手上的旋切部件摆动-伸缩带动圆盘刀切断果梗,实现果实与果梗分离。双指手抓持葡萄后被机械臂导引到卸果位置,双指手恢复到初始状态,实现放果动作。

图1 抓持-旋切式欠驱动双指手葡萄采摘装置结构简图Fig.1 Grape-picking device with a grasping and rotary-cut type of underactuated double fingered hand1.远指节 2.近指节 3.电位器 4.S型压力传感器 5.主支撑架 6.欠驱动双指手 7.RealSense实感相机 8.夹持电动机 9.旋转电动机 10.连接卡盘 11.伸缩电动机 12.旋转伸缩部件 13.旋切电动机 14.旋切部件 15.平板压力传感器
欠驱动双指手的单根手指由近指节和远指节组成,通过布置在主支撑板上的2套相同的导轨滑块机构和串联式连杆机构驱动2个指节,1个夹持电动机驱动滑块。考虑到柔性无损采摘葡萄要求,在近指节和远指节的中间位置安装4个平面压力传感器(量程50 N,精度0.05%),用来感知各指节与葡萄的接触力大小,用于接触力反馈控制。在4个平板压力传感器表面均贴上软硅胶,目的是增加指面与葡萄之间的摩擦力,且对抓持葡萄时的接触力有一定缓冲作用。在两侧的滑块处各安装1个S型压力传感器(量程50 N,精度0.05%),用来感知夹持电动机的输出推力大小。每根手指安装3个电位器(B503),用来感知滑块与连杆夹角、近指节摆角和近指节与远指节的相对转角。
为实现果实与果梗分离,设计的旋切部件具有3个自由度,旋转伸缩部件的作用是将旋切部件的圆盘刀导引至果梗位置切断果梗。其中,旋转电动机(东方步进电动机PK543AW-T30,额定转矩为1.5 N·m)安装在主支撑架的上方,带动伸缩部件与旋切部件绕固定轴摆动;伸缩部件采用滚珠丝杠和导轨滑块结构,伸缩电动机选取正吉28 mm步进电动机J-2818HB2401型,容许转矩0.12 N·m,可实现0~160 mm的伸缩运动。旋切电动机选用杰胜JS-38SRZ-Y型10 W永磁直流电动机,额定转速1 700 r/min,额定转矩0.075 N·m。
为了对果实与果梗精确定位,在欠驱动双指手的上方设置RealSense实感相机(Intel R200)。
2 欠驱动手指机构设计及驱动选型
2.1 指节尺寸与转角范围确定
葡萄的赤道面直径Φ为100~200 mm,欲使双指手抓持葡萄的工作空间满足该直径要求,应用试凑法取不同的近指节和远指节长度,取近指节l1=80 mm、远指节l2=60 mm时,双指手抓持葡萄的工作空间可满足葡萄直径范围要求,如图2所示。

图2 双指手抓持葡萄的工作空间Fig.2 Work space of grasping grapes of double fingered hand
当Φ=95 mm时,两手指的远指节恰好不发生干涉叠加,且指节与果实形成4点接触,呈包络抓持状态。当Φ=200 mm时,远指节为垂直姿态,远指节恰好与果实形成2点接触,呈夹持状态。据此,双指手抓持葡萄的直径范围为95~200 mm。以水平方向为基准,远指节转角范围为90°~157.66°,近指节转角范围为45°~78.83°,两指节处机械限位结构按两指节的转角范围设计。
2.2 欠驱动手指机构抓取果实的静力学建模

图3 欠驱动手指机构运动简图及受力分析Fig.3 Force analysis and motion diagram of underactuated finger mechanism
由于两侧手指机构沿丝杠对称配置,现取右侧手指机构进行分析。如图3所示,夹持电动机通过摇杆滑块机构OEGH将电动机的输出推力F0转变为四杆机构OABC的输入力矩T0。
左、右侧滑块所受驱动力F02、F01与电动机的输出推力F0的关系为
F01+F02=F0
(1)
夹持电动机通过摇杆滑块机构将驱动力F01、F02传递给连杆式欠驱动机构。因此,连杆OC绕基点O所受到的力矩T0为
T0=F01ccosβcos(α+β)
(2)
式中c——杆OC长度
α——杆OC与水平方向的夹角
β——杆GE与竖直方向的夹角
抓取果实时,2个指节依次被果实约束后,双指手的构型即被确定,如图3所示。根据欠驱动原理[21-22],单手指力学模型可表示为
TTω=FTV
(3)
其中
TT=[T0T1]T
(4)
式中T——四杆机构OABC的输入力矩T0和扭簧作用杆AB的扭矩T1组成的矩阵
k——扭簧刚度系数,k=0.13 N·mm/(°)
T10——初始预紧扭矩,T10=64 N·mm

F——作用在手指上的外力所构成的矢量,由接触力F11和F12构成
V——外力作用点的速度分量,由接触点的法向速度矢量V1和V2构成
l1——近指节OA长
d1——近指节接触点到点O的距离
d2——远指节接触点到点A的距离

对于四杆机构OABC,有
(5)
将式(5)写成矩阵形式为
(6)
其中

式中φ1——OA与OC的夹角
φ2——AO与AB的夹角
b——杆BC长度a——杆AB长度
改写式(3)得
TT=FTVω-1
(7)
其中
Vω-1=JVJωωω-1=JVJω
由式(7)得
(8)
当d1≠0,d1d2≠0时,JV为非奇异矩阵,且Jω恒为非奇异矩阵,均存在逆矩阵。由式(8)得
(9)
其中
由式(9)可得

(10)

(11)
式(10)、(11)给出接触力F11、F12与T0、T1之间的静力学关系。当欠驱动手指机构的尺寸已知时,F11、F12受机构运动位置决定的α、β、φ1、φ2、θ2等角度参数的影响。
2.3 连杆式欠驱动机构参数确定
如图3所示,当四杆机构OABC中杆AB与杆BC、杆BC与杆OC之间相互垂直时,其传力性能最好。按各指节接触力均匀分布的设计要求,令
f1=max(F11,F12)
f2=min(F11,F12)
则手指机构参数优化的目标函数f为
f=abs(f1-f2)
(12)
须满足的几何约束为
(13)
(14)
将杆长a、b、c作为设计变量,联立式(10)、(11),利用Matlab遗传算法工具箱求解式(12)。已知l1=80 mm,l2=60 mm,d1=40 mm,d2=30 mm,且20 mmlt;alt;60 mm,60 mmlt;blt;100 mm,30 mmlt;clt;80 mm,种群规模为200,求得最优解并取整得a=40 mm,b=85 mm,c=55 mm,目标函数f=2.76×10-9N。
2.4 接触力范围确定
2.4.1最小接触力的确定由于葡萄形状不规则,4个指节与葡萄最多形成4点接触,最少形成2点接触。果实重力为G,将软硅胶贴附于手指各指节内侧,硅胶与果实的摩擦因数为μ,最大静摩擦力为Ff,葡萄受力分析如图4所示。

图4 4点接触抓取葡萄受力分析Fig.4 Force analysis of grasping grapes with four contact points
葡萄被抓持而不滑落的临界条件为:果实重力G等于果实与手指之间产生的最大静摩擦力[20-21]。当2点接触时最小接触力Fmin满足

(15)
则3点接触或4点接触时,最小接触力均满足上述临界条件。葡萄质量一般为0.2~2 kg之间,硅胶与葡萄的摩擦因数μ在0.6~0.8之间[22]。取葡萄质量2 kg,摩擦因数μ为0.6,可得Fmin=16.67 N。
2.4.2最大接触力的确定当葡萄串某处受到的挤压力达到单颗葡萄的破裂力时,可认为该处葡萄已经发生机械损伤,据此设定欠驱动双指手的最大接触力。如图5所示,相邻葡萄对单颗葡萄的作用分力为Fi1、Fi2、Fi3,其合力∑Fi等于指节处接触力F11。假设Fi3反作用传递给相邻葡萄,内部任意相邻位置处的葡萄所受合力∑F′i=-Fi3lt;F11,说明接触点处的葡萄受到的接触力最大,最易损伤。

图5 单颗葡萄的受力分析Fig.5 Stress analyses of single grape
为此,对单颗葡萄进行挤压破裂试验,以确定抓持葡萄的最大接触力。试验所选材料为红提、青提、美人提和乒乓葡萄,各取15串,每串葡萄随机选取3颗新鲜无损伤葡萄,每颗葡萄都带有果蒂以保证葡萄的完整性,共计180组试验。如图6所示,首先在物性仪上将葡萄横向放置,然后采用圆形平面压头(直径为100 mm)以0.1 mm/s的加载速率缓慢加载。
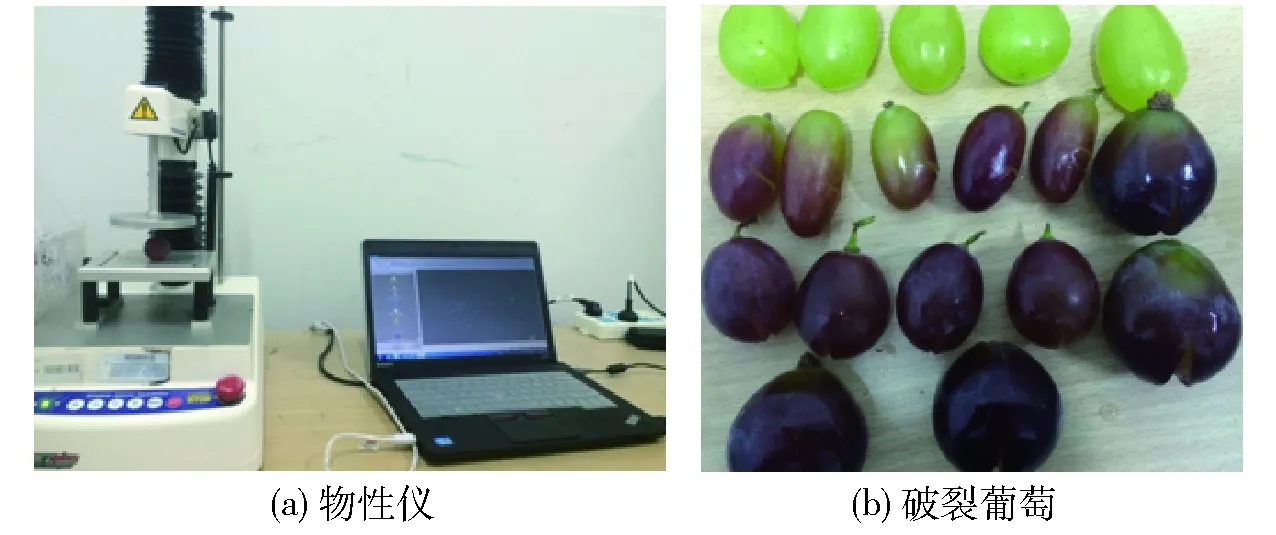
图6 单颗葡萄挤压试验Fig.6 Crush tests of single grape
利用圆形平面压头压缩4种葡萄,部分单颗葡萄挤压破裂如图6所示。统计分析其受力与变形关系曲线如图7所示,4条曲线均呈非线性,且无明显的生物屈服点出现,当Fc达到破裂力时,果皮发生破裂。红提、青提、美人提和乒乓葡萄的平均破裂力分别为36.56、34.92、38.92、31.64 N。为尽量减少接触力损伤并保证可靠夹持果实,最大接触力确定为20 N,对应的葡萄挤压变形最大值不超过5 mm。

图7 4种单颗葡萄的力-变形曲线Fig.7 Force-displacement curves of four types of single grape
2.5 静力学模型求解与手指机构驱动电动机选型联立式(10)、(11)可得
T0=d1F11+(l1cosθ2+d2)F12
(16)
由式(2)得

(17)
同理

(18)
以抓取赤道面直径200 mm为例,已知l1=80 mm,l2=60 mm,d1=40 mm,d2=30 mm,d=60 mm,e=5 mm,θ2=6°,β=30°,最大接触力为20 N,即F11=F12=F21=F22=20 N,由式(1)求得F0=157.25 N。考虑到传递效率和意外过载等因素,手指机构的驱动电动机选用PK543AW-T30型东方步进电动机,其输出推力为212 N,是理论推力F0的1.35倍,满足驱动力要求。
3 采摘装置控制系统设计
3.1 控制系统硬件构成
采摘装置的控制系统硬件主要由STM32单片机、步进电动机及其驱动器、直流电动机、压力传感器、电位器等组成,其结构如图8所示。

图8 采摘装置控制系统硬件结构图Fig.8 Hardware structure of control system for grape-picking device
3.2 欠驱动双指手的最大接触力控制
根据前述接触力分析,双指手至少形成2点接触抓持果实,且2个接触力约束在16~20 N范围内,可保证稳定抓持且不损伤果实。为此,设计的最大接触力控制流程如图9所示。
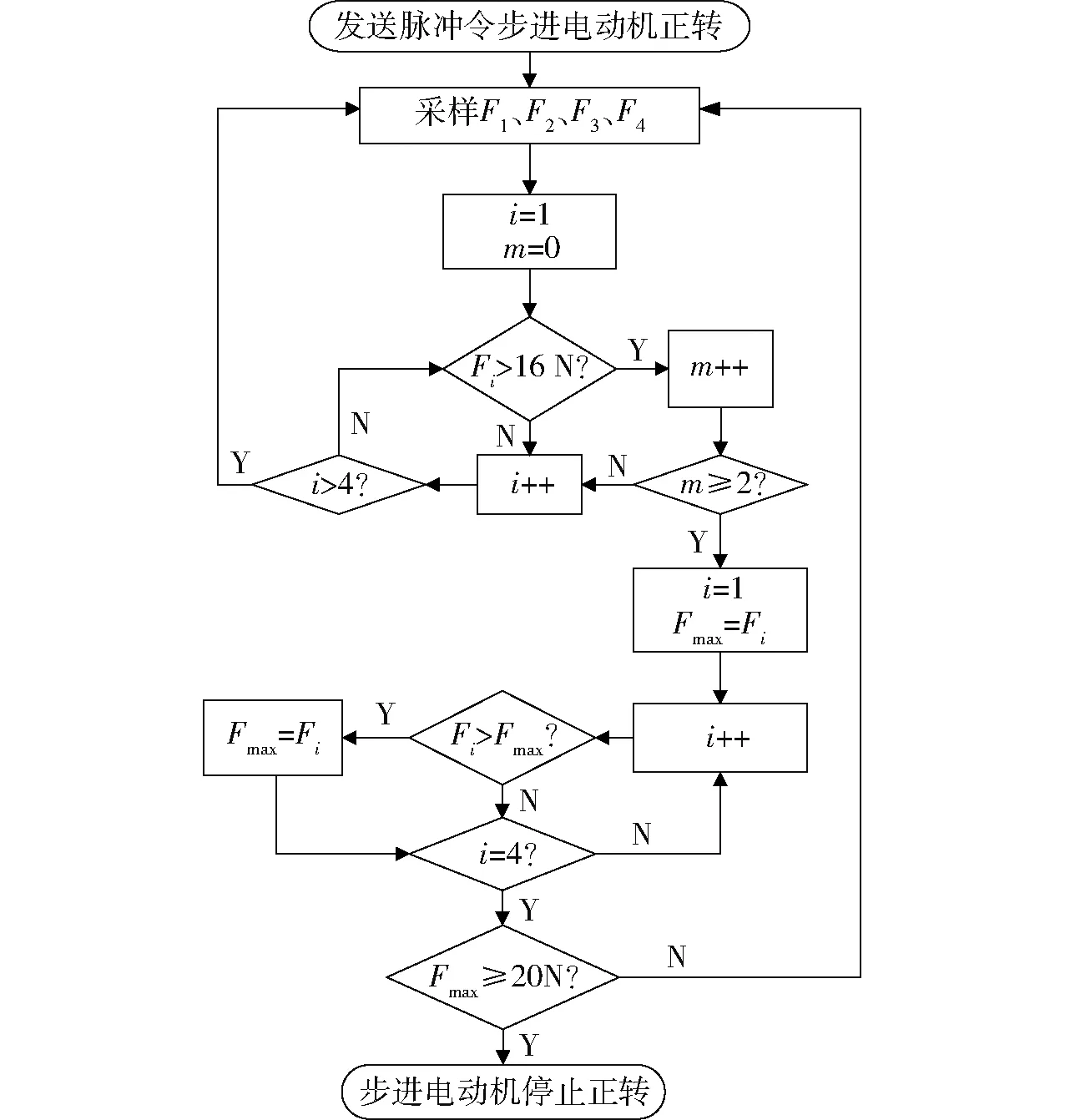
图9 最大接触力控制流程图Fig.9 Flow chart of maximum contact force control
图9中,m为接触点计数变量。设定采样时间间隔为5 ms,循环采样4个接触力信号,首先判定是否有2个接触力大于16 N,若为否,则重新采样,反复判定直到其中2个接触力大于16 N,并判断2个大于16 N的接触力是否达到20 N,若为否,则重新采样再次判断直到有1个大于16 N的接触力达到20 N,则步进电动机停止正转,使双指手保持构型。上述程序对3点接触或4点接触同样适用。
3.3 旋转伸缩部件与旋切部件的运动控制
从步进电动机的矩频特性可知,启动频率越高,启动转矩就越小,启动时会造成失步,而停止时又会发生过冲。为此,对旋转电动机和伸缩电动机采用加减速梯形控制方式。对于旋转电动机,设置转速n=0.25 r/s,步进分辨率δ=1 600 p/r,匀加速50 p达到最大速度,加速用时125 ms,转动11.25°。对于伸缩电动机,设置转速n=1 r/s,步进分辨率δ=400 p/r,匀加速50 p达到最大速度,加速125 ms,前进0.5 mm。减速过程和加速过程相反,匀加减速过程共需100 p。旋转电动机和伸缩电动机的运动控制流程如图10所示。

图10 旋转电动机和伸缩电动机的运动控制流程图Fig.10 Flow chart of motion control of rotary motor and telescopic motor
首先读取果实目标位置,计算所需脉冲数Y,判断步进电动机的脉冲数是否大于100 p。当步进电动机的脉冲数大于100 p,即步进电动机达到最大速度时,此时,先匀加速50 p,再匀速运动脉冲数Z=Y-100,然后匀减速50 p,步进电动机停止运动。当步进电动机的脉冲数小于或等于100 p,即步进电动机无法达到最大速度时,则加速所需脉冲数取Y/2,然后减速Y/2。其中,X1表示旋转电动机需旋转的角度,X2表示伸缩电动机需前进的距离,滚珠丝杠导程为4 mm。
4 采摘试验
研制的葡萄采摘装置如图11所示,但未安装RealSense实感相机。采摘试验时,果实及果梗相对双指手手掌的空间位置通过手工测量获得。

图11 抓持-旋切式欠驱动双指手葡萄采摘装置样机Fig.11 Grape-picking device prototype with a grasping and rotary-cut type of underactuated double fingered hand1.步进电动机驱动器 2.24V电源 3.STM32单片机 4.机械臂 5.采摘装置 6.压力传感器 7.电位器 8.压力传感器显示仪表
为测定葡萄采摘装置采摘果实的成功率及效率,选取50串优质无表皮损伤的红提作为试验对象,赤道面直径范围100~180 mm。试验时,首先用绳系住红提的果梗并悬挂在双指手前方,采摘装置对红提抓持与旋切果梗的试验过程如图12所示,葡萄赤道面直径约150 mm。双指手从葡萄中部的赤道面附近开始接近(图12a),在连杆式驱动机构带动下,近指节首先与葡萄发生接触(图12b),然后远指节与葡萄发生接触(图12c),测得一组接触力变化曲线如图13所示。当接触力满足最大接触力控制条件后,葡萄即被抓持(图12d)。随后,旋转和伸缩步进电动机按图10所示控制流程进行动作,旋转步进电动机带动旋切装置进行旋转动作(图12e),之后伸缩电动机带动旋切装置进行伸缩动作(图12f),当旋切机构到达果梗所在位置时,旋切电动机带动圆盘刀切割果梗(图12g)。果梗切断后葡萄未从双指手滑落,实现稳定抓持(图12h)。

图12 采摘葡萄试验Fig.12 Grape-picking tests
在图13中,设定电动机转速n=0.1 r/s,步进分辨率δ=800 p/r,单片机控制夹持电动机匀速正转,双指手抓持过程分为3个阶段:①0~2 s为接近葡萄阶段,接触力为零。②2~6.5 s为初始夹持阶段,在第2秒时近指节上的压力传感器开始检测到接触力信号,控制器开始调用图9所示的最大接触力控制程序。由于近指节接触力不满足判据,夹持电动机继续正转,第4秒时远指节开始接触果实。③6.5 s后进入稳定夹持阶段,至少1个接触力大于16 N且最大值达到20 N,单片机控制夹持电动机停止正转。

图13 各指节接触力曲线Fig.13 Contact force curves of each knuckle
当完成最大接触力控制后,双指手保持稳定夹持阶段。同时,单片机按图10参数设置控制旋转电动机旋转90°耗时2.5 s。伸缩部件将旋切部件推送到目标果梗位置,依伸缩量不同,耗时在1~5 s范围内。
在采摘试验过程中,旋切电动机的速度设定为400~600 r/min时,刀盘会偶尔出现卡死现象,且切割时间稍长。当速度为600~800 r/min时,切割时间为5~8 s。在速度设定为1 000~1 300 r/min时,切割时间为1~3 s,高速旋切效果较好。
采摘装置进行了50次葡萄采摘试验,采摘装置机械部件与测控系统工作正常,最大接触力控制判据可满足可靠夹持要求,采摘成功率为100%。葡萄赤道面直径为100~180 mm,整个抓持过程耗时16.7~27.1 s。不考虑视觉定位果实与果梗的耗时,采摘装置完成一次抓持葡萄和旋切果梗过程,耗时21.2~37.6 s,平均耗时约29.4 s。
采摘果实后将50串葡萄放入室温环境下,3 d后观察葡萄的挤伤情况。按照挤伤程度可分为:脱粒和表皮出现裂纹的严重损伤和表皮没有出现裂纹的中轻度损伤[23]。中轻度损伤的葡萄颗粒由于细胞结构被破坏,加快了细胞呼吸作用,使果实发生褐变现象。为研究方便,定义果实挤伤率为每串葡萄中出现明显褐变的颗粒数和采摘时发生脱粒、表皮出现裂纹的颗粒数占每串葡萄所有颗粒数的百分比。统计并计算得出,果实的平均挤伤率为5.2%。 造成果实挤伤的因素主要是个别葡萄颗粒与主支撑架、近指节和远指节的非压力传感器平板表面处发生刚性接触而造成的中轻度损伤。
5 结论
(1)欠驱动双指手葡萄采摘装置的双指四指节手爪能从中部接近并包络抓取葡萄,复合在双指手上的旋切装置摆动-伸缩带动圆盘刀切断果梗。
(2)基于欠驱动手指机构静力学模型的驱动连杆尺寸确定与驱动电动机选型正确,可以实现赤道面直径95~200 mm的葡萄抓持。欠驱动双指手的最大接触力控制为16~20 N较为合适,指节压力传感器实时反馈接触力大小可以实现至少2个指节的最大接触力有效控制,满足柔性无损采摘要求。采用加减速梯形控制方式实现了旋切装置的旋转与伸缩运动,圆盘刀转速1 200 r/min可有效切断果梗。
(3)50次葡萄采摘试验表明设计的欠驱动双指手采摘装置的采摘成功率为100%,果实挤伤率为5.2%,不考虑视觉定位果实与果梗的耗时,完成一次抓持-旋切动作平均耗时约29.4 s。
1 宋健, 张铁中, 徐丽明. 果蔬采摘机器人研究进展与展望[J]. 农业机械学报, 2006, 37(5): 158-162.
SONG Jian, ZHANG Tiezhong, XU Liming.Research actuality and prospect of picking robot for fruits and vegetables[J]. Transactions of the Chinese Society for Agricultural Machinery, 2006, 37(5): 158-162. (in Chinese)
2 李秦川, 胡挺, 武传宇, 等. 果蔬采摘机器人末端执行器研究综述[J]. 农业机械学报, 2008,39(3): 175-179.
LI Qinchuan, HU Ting, WU Chuanyu, et al. Review of end-effectors in fruit and vegetable harvesting robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(3): 175-179. (in Chinese)
3 刘继展,李萍萍,李智国. 番茄采摘机器人末端执行器的硬件设计[J]. 农业机械学报,2008,39(3): 109-112.
LIU Jizhan, LI Pingping, LI Zhiguo. Hardware design of the end-effector for tomato-harvesting robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(3): 109-112. (in Chinese)
4 鲍官军,张水波,陈亮,等. 基于气动柔性驱动器的球果采摘末端抓持器[J/OL]. 农业机械学报,2013,44(5): 242-246. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130542amp;flag=1. DOI:10.6041/j.issn.1000-1298.2013.05.042.
BAO Guanjun, ZHANG Shuibo, CHEN Liang, et al. Design of spherical fruit end-grasper based on FPA[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(5): 242-246. (in Chinese)
5 王学林, 姬长英, 周俊, 等.基于灰色预测控制的果蔬抓取系统设计与试验[J]. 农业工程学报, 2010, 26(3): 112-117.
WANG Xuelin, JI Changying, ZHOU Jun, et al.Design and experiment of fruit and vegetable grasping system based on grey prediction control [J]. Transactions of the Chinese Society of Agricultural Engineering, 2010, 26(3): 112-117.(in Chinese)
6 杨庆华, 金寅德, 钱少明, 等. 基于气动柔性驱动器的苹果采摘末端执行器研究[J]. 农业机械学报, 2010, 41(9):154-158.
YANG Qinghua, JIN Yinde, QIAN Shaoming, et al. Research on end-effector of apple picking based on new flexible pneumatic actuator[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(9):154-158. (in Chinese)
7 张凯良, 杨丽, 王粮局, 等. 高架草莓采摘机器人设计与试验[J/OL]. 农业机械学报, 2012, 43(9):165-172. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20120931amp;flag=1. DOI:10.6041/j.issn.1000-1298.2012.09.031.
ZHANG Kailiang, YANG Li, WANG Liangju, et al. Design and experiment of elevated substrate culture strawberry picking robot[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(9):165-172. (in Chinese)
8 HAYASHI S, TAKAHASHI K, YAMAMOTO S, et al. Gentle handling of strawberries using a suction device[J]. Biosystems Engineering, 2011, 109(4): 348-356.
9 傅隆生, 张发年, 槐岛芳德,等. 猕猴桃采摘机器人末端执行器设计与试验[J/OL]. 农业机械学报, 2015, 46(3):1-8. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150301amp;flag=1. DOI:10.6041/j.issn.1000-1298.2015.03.001.
FU Longsheng, ZHANG Fanian, YOSHINORI Gejima, et al. Development and experiment of end-effector for kiwifruit harvesting robot[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3):1-8. (in Chinese)
10 钱少明, 杨庆华, 王志恒, 等. 黄瓜抓持特性与末端采摘执行器研究[J]. 农业工程学报, 2010, 26(7): 107-112.
QIAN Shaoming, YANG Qinghua, WANG Zhiheng, et al.Research on holding characteristics of cucumber and end-effector of cucumber-picking[J]. Transactions of the Chinese Society of Agricultural Engineering, 2010, 26(7): 107-112. (in Chinese)
11 纪超, 冯青春, 袁挺,等. 温室黄瓜采摘机器人系统研制及性能分析[J]. 机器人, 2011, 33(6):726-730.
JI Chao, FENG Qingchun, YUAN Ting, et al. Development and performance analysis on cucumber harvesting robot system in greenhouse [J]. Robot, 2011, 33(6):726-730. (in Chinese)
12 胡志勇, 张学炜, 张伟,等. 西瓜采摘末端执行器夹持力精确控制[J]. 农业工程学报, 2014, 30(17): 43-49.
HU Zhiyong, ZHANG Xuewei, ZHANG Wei, et al. Precise control of clamping force for watermelon picking end-effector[J]. Transactions of the Chinese Society of Agricultural Engineering, 2014, 30(17): 43-49. (in Chinese)
13 叶敏, 邹湘军, 杨洲, 等. 荔枝采摘机器人拟人指受力分析与夹持试验[J/OL]. 农业机械学报, 2015, 46(9): 1-8. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150901amp;flag=1. DOI:10.6041/j.issn.1000-1298.2015.09.001.
YE Min, ZOU Xiangjun, YANG Zhou, et al. Clamping experiment on humanoid fingers of litchi harvesting robot[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(9):1-8. (in Chinese)
14 刘继展, 白欣欣, 李萍萍, 等. 果实快速夹持复合碰撞模型研究[J/OL]. 农业机械学报, 2014, 45(4): 49-54. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140408amp;flag=1. DOI:10.6041/j.issn.1000-1298.2014.04.008.
LIU Jizhan, BAI Xinxin, LI Pingping, et al. Complex collision model in high-speed gripping of fruit[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(4): 49-54. (in Chinese)
15 姬伟, 李俊乐, 杨俊,等. 机器手采摘苹果抓取损伤机理有限元分析及验证[J]. 农业工程学报, 2015, 31(5):17-22.
JI Wei, LI Junle, YANG Jun, et al. Analysis and validation for mechanical damage of apple by gripper in harvesting robot based on finite element method[J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(5):17-22. (in Chinese)
16 周俊, 杨肖蓉, 朱树平. 基于自适应神经模糊网络的果蔬抓取力控制[J/OL]. 农业机械学报, 2014, 45(7): 67-72. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140711amp;flag=1. DOI:10.6041/j.issn.1000-1298.2014.07.011.
ZHOU Jun, YANG Xiaorong, ZHU Shuping. Griping force control using adaptive neuro-fuzzy inference systems[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(7): 67-72. (in Chinese)
17 金波, 林龙贤. 果蔬采摘欠驱动机械手爪设计及其力控制[J]. 机械工程学报, 2014, 50(19):1-8.
JIN Bo, LIN Longxian. Design and force control of an underactuated robotic hand for fruit and vegetable picking[J]. Journal of Mechanical Engineering, 2014, 50(19):1-8. (in Chinese)
18 LI Z, LI P, YANG H, et al. Stability tests of two-finger tomato grasping for harvesting robots [J]. Biosystems Engineering, 2013, 116(2): 163-170.
19 王学林, 肖永飞, 毕淑慧,等. 机器人柔性抓取试验平台的设计与抓持力跟踪阻抗控制[J]. 农业工程学报, 2015, 31(1): 58-63.
WANG Xuelin, XIAO Yongfei, BI Shuhui, et al. Design of test platform for robot flexible grasping and grasping force tracking impedance control[J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(1): 58-63. (in Chinese)
20 姬伟, 罗大伟, 李俊乐,等. 果蔬采摘机器人末端执行器的柔顺抓取力控制[J]. 农业工程学报, 2014, 30(9):19-26.
JI Wei, LUO Dawei, LI Junle, et al. Compliance grasp force control for end-effector of fruit-vegetable picking robot[J]. Transactions of the Chinese Society of Agricultural Engineering, 2014, 30(9): 19-26. (in Chinese)
21 GERT A K, FRANS C T H, JUST L H. A planar geometric design approach for a large grasp range in underactuated hands [J]. Mechanism and Machine Theory, 2011, 46: 1121-1136.
22 LIONEL B, CLEMENT M G. Kinetostatic analysis of underactuated fingers [J]. IEEE Transactions on Robotics and Automation, 2004, 20(2): 211-221.
23 李智国, 刘继展, 李萍萍. 机器人采摘中番茄力学特性与机械损伤的关系[J]. 农业工程学报, 2010, 26(5):112-116.
LI Zhiguo, LIU Jizhan, LI Pingping. Relationship between mechanical property and damage of tomato during robot harvesting[J].Transactions of the Chinese Society of Agricultural Engineering, 2010, 26(5): 112-116. (in Chinese)
DesignandExperimentofGrape-pickingDevicewithGraspingandRotary-cutTypeofUnderactuatedDoubleFingeredHand
YIN Jianjun CHEN Yonghe HE Kun LIU Jizhan
(KeyLaboratoryofModernAgriculturalEquipmentandTechnology,MinistryofEducation,JiangsuUniversity,Zhenjiang212013,China)
According to the requirements of flexible and nondestructive grape-picking, a kind of grape-picking device with a grasping and rotary-cut type of underactuated double fingered hand was developed based on the underactuated principle and cooperative working mode of grasping and rotary-cut. To realize the separation of the fruit from the stalk, an electric motor drove a double fingered hand with four knuckles by a linkage mechanism, and the hand approached from the middle of the grape and enveloped it. Its rotary-cut device installed on the hand drove the cutting disc to cut off the stalk by the jigging and telescopic motion. Based on this design idea, the dimensions and rotation angle range of two knuckles of underactuated finger mechanism were firstly determined by analyzing equatorial diameter of grape. Then, the static model of the underactuated finger mechanism was established, and the driven linkage size was determined according to the requirements of optimal force transfer and well-distributed contact force. Combining with the contact force analysis and squeezing-bursting test of the grapes, maximum contact force of grasping 2 kg grape without damage was obtained, which was equal to 20 N. Thrust force of the electric motor was obtained by solving the static model of the underactuated finger mechanism, and type choice of the electric motor was directed according to the thrust force. The control system of grape-picking device was designed, and the effective control of maximum contact force was realized according to real-time feedback of contact force from four pressure sensors fixed on knuckles. The motion of the rotary-cut device was realized by adopting the control mode of acceleration and deceleration, cutting disc can effectively cut off the stalk with the speed of 1 200 r/min. By picking 50 bunches of grapes with the equatorial diameter ranged from 95 mm to 200 mm, the results of grape-picking tests showed that the picking success rate of the device was 100%, extrusion wound rate of grapes was 5.2%, and average cost time of the device was 29.4 s without consideration of time consuming of vision localization of grape and its stalk to complete a grasping and rotary-cut motion.
grape; fruit-picking; end-effector; underactuated hand; contact force control
10.6041/j.issn.1000-1298.2017.11.002
TP241.3; S372
A
1000-1298(2017)11-0012-09
2017-03-10
2017-04-18
国家自然科学基金项目(51475212)和江苏高校优势学科建设工程项目(苏政办发(2014)37号)
尹建军(1973—),男,研究员,博士,主要从事收获机械集成设计和农业机器人研究,E-mail: yinjianjun@ujs.edu.cn
