一种基于kinect体感相机的家庭康复训练系统
2017-11-27李邦政农旭安李旭昌
李邦政+农旭安+李旭昌


摘 要 在社会老龄化背景下,康复医生和患者比例失配的情况非常严峻。家庭康复系统通过kinect骨骼追踪技术采集训练者动作的深度信息,使医生远程了解患者训练进展。借助计算机和互联网,患者可以咨询医师,而医师可以根据训练效果通过互联网远程指导与开出训练动作“处方”。患者在家里就可以康复训练。测试结果表明:该系统病人的康复有积极影响。
关键词 kinect相机;家庭康复训练;远程指导
中图分类号 TP3 文献标识码 A 文章编号 1674-6708(2017)198-0148-02
为了促进运动功能障碍患者身体肌能更好恢复,患者在治疗出院后仍需在社区或者家庭进行康复训练。然而运动功能障碍患者的社区康复仍有一些困难:1)上门服务的治疗师数量稀少而且收费高;2)患者在缺乏标准、系统的动作辅导情况下自行训练,科学性不高,效果有限。3)患者需在康复活动中心等特殊环境训练,且穿戴复杂的训练设备,对患者来说很不方便。家庭康复系统通过kinect骨骼追踪技术采集训练者动作的深度信息;借助计算机和互联网,患者可以咨询医师,而医师可以根据训练效果通过互联网远程指导与开出训练动作“处方”,患者在家里就可以康复训练。
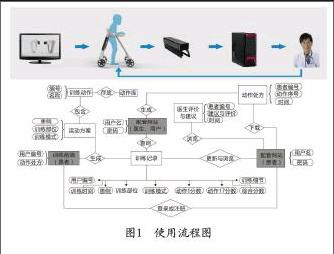
1 系统的使用流程
系统硬件由助行车、kinect相机、计算机组成。显示器显示的康復动作引导残疾人系统的完成康复训练,Kinect传感器安装在离人0.4m~8m的范围内,用于捕捉患者肢体康复动作时肢体和身体的倾斜角度,计算机接收到Kinect传感器获取的自动捕捉数据,并与标准康复动作对比,正确的给与语音奖励,错误的给与语音提示。计算机通过网络实时传输给外部计算机,医生可以根据数据判断训练完成情况,并通过计算机远程指导,如图1。患者在起立训练时,液压弹簧将人体托起,减轻下肢承受力。患者站立起来后,弹力复位皮筋和折叠复位结构将座椅垂直收起,增加患者行走训练的空间。患者在训练累时,将座椅水平旋转90℃,即可在座椅上休息。结束训练时,将助行车折叠以减少占用空间。系统特别适合下肢力量不足患者的训练。
2 系统构成
2.1 前端系统模块
前端系统主要由kinect传感器和显示器组成。Kinect是Microsoft公司推出的一款性能极强的传感器。其核心部件包括红外投影机、彩色摄像机、红外深度摄像机和芯片4个部分,捕捉范围在1m~8m。Kinect传感器能够提供的数据信息有:深度信息、视频和音频3种。Kinect在系统中的功能主要有:患者数据的输入和储存、根据运动障碍一侧、康复部位及训练模式设立康复计划、进行训练时的语音提醒。显示器主要是显示动作模板和实时显示患者训练画面、训练结束后通过聊天窗口和PDF文档反馈训练结果的评价。
2.2 后台实时数据处理模块
数据采集并初步处理后,系统对根据相应关节连线的角度值和位置范围值对患者的运动数据进行实时评分。数据采集模块中利用公式计算相联系的3个关节点连线的夹角,如公式(1):
通过公式(2),当Kinect捕捉关节运动时,系统可以随时获取节点之间的相对夹角,从而计算出Δt时间范围内运动的关节点与圆心关节点的夹角变化Δθ,并假设该运动关节点对应角度范围的变量为K,K通过公式(2)确定:
在每次数据采集过程中,系统计算当前时间和前Δt时刻的夹角变化Δθ,获得K的数据并计算,当K=假时继续捕捉运动关节点所在位置信息,当K=真时显示相应音频信息和文字信息提醒,结束并开始下一动作的信息采集。
2.3 动作库模块
动作库由动作模板和评分算法组成,它不仅是整个系统的重要部分,而且是康复训练前端的核心。动作模板和评分算法分别具有为患者提供训练引导、为评价用户训练情况提供依据的作用。根据每个动作的特点,选取评分要点,如关键部位夹角、关节位置的范围值以及不同关节点位置关系等。动作库如表1。
2.4 患者动态实时火柴人显示模块
将系统设定Kinect采集信息为30帧/秒,且在显示器动态实时播放含有20个人体关节点的火柴人的画面,患者可以参照火柴人的画面了解自己训练动作是否标准并及时作出调整。Kinect骨骼追踪技术所采集的共有人体20个关节点。
2.5 中心网站和网络交流模块
开发中心网站的目的是为了方便患者查阅个人训练情况、医生意见、下载新“康复处方”、医生可以查询患者资料并远程指导训练。网站包含3个部分:1)公共部分,包括首页、登陆页面和注册页面。2)患者用户部分,包括患者登陆后的总页与集合在该页的各功能页,如图4。3)医生用户部分,包括医生登陆后的总页与集合在该页的各功能页。
2.6 助行车
助行车主要用于辅助患者起立、行走和原地休息。患者在起立训练时,液压弹簧将人体托起,减轻下肢承受力。患者站立起来后,弹力复位皮筋和折叠复位结构将座板垂直收起,增加患者行走训练的空间。患者在训练累时,将座板水平旋转90°,即可在座椅上休息。结束训练时,将助行车折叠以减少占用空间。整体效果图如图2。
3 系统测试
为了检验系统的稳定性和可靠性,分别选取肘关节屈曲、双手合并、肘关节屈曲加平移、头部360°转动等4个动作,每个动作测试100次。对比实际动作与系统识别是否准确。结果表明系统对肘关节屈曲、双手合并动作能完全识别,而小肘关节屈曲加平移、头部360°转动5次识别不出。其原因是测试人员动作较快而系统识别发生误差。总体而言该系统的稳定性和可靠性能够满足患者需要。
4 结论
在社会老龄化,运动性功能障碍患者逐年增多而医护人员紧缺的背景下,家庭康复训练系统能解放医生的劳动力,提高患者康复效果。它在优良的人机交互、医患之间良性互动的基础上,对病人的康复有积极的影响。测试结果表明,该系统的稳定性和可靠性符合设计要求,具有一定的应用价值。
参考文献
[1]姚倩,王丽,侯筱婷.基于Kinect的自主康复系统的设计与实现[J].电子产品世界,2015(8):37-39.
[2]杨艺,许源,张俊杰,等.基于Kinect与虚拟现实的社区家庭康复系统的研制[J].微型电脑应用,2014,30(3):32-34.
[3]姜振兴.基于Kinect的人体康复系统研究与设计[D].青岛:中国海洋大学,2015.endprint
