基于模型预测控制的智能车辆路径跟踪控制器设计*
2017-11-24王艺蔡英凤陈龙王海李健储小军
王艺 蔡英凤 陈龙 王海 李健 储小军
(江苏大学,镇江 212013)
基于模型预测控制的智能车辆路径跟踪控制器设计*
王艺 蔡英凤 陈龙 王海 李健 储小军
(江苏大学,镇江 212013)
为提高智能车辆路径跟踪的鲁棒性,基于模型预测控制原理提出了一种路径跟踪控制方法。该方法对车辆的3自由度非线性动力学模型进行线性化,得到线性时变模型和预测方程,并将包括控制量、控制增量等约束纳入二次规划的求解过程,同时考虑质心侧偏角、路面附着系数等影响操稳特性的约束条件。在CarSim和MATLAB/Simulink平台上以不同车速进行了双移线工况下的联合仿真,结果显示,该控制器可较好地实现路径跟踪,并保持较好的稳定性。
1 前言
自动转向控制作为智能车辆自动化驾驶控制的关键技术[1],通过控制转向角操控车辆侧向运动以实现路径跟踪。很多模型算法可以实现较高精度的路径跟踪,应用较多的有PID算法[2]、纯点追踪控制[1]、前馈-反馈控制[3]、预瞄跟踪最优控制[4~5]、线性二次型调节器(Linear Quadratic Regulator,LQR)跟踪控制器[6]和模型预测控制等方法[4]。
模型预测控制(Model Predictive Control,MPC)于20世纪70年代被提出,目前已广泛应用于各个领域[7]。模型预测控制具有预测模型、滚动优化和反馈校正等基本特征[8],尤其适用于不易建立精确数学模型且存在约束条件的控制系统,在解决智能车辆在高速和冰雪等复杂路面条件下的路径跟踪控制问题上具有独特的优势[9]。车辆的行驶环境复杂多变,充满各种不确定因素,所以不论是车辆自主驾驶还是由驾驶员控制车辆,都需要根据周围的环境信息实时决定下一步的行驶计划,这一点同模型预测控制的思想一致[10]。近年来,MPC已广泛应用于智能车辆路径跟踪控制[11]。
为了提高智能车辆在中低速工况下跟踪目标路径的准确性,本文从智能车辆对路径跟踪控制的实时性和鲁棒性出发,同时强调车辆行驶稳定性,对智能车辆的自主转向进行研究。首先建立车辆3自由度动力学模型,并构建预测方程,将问题转化为二次规划问题,然后确定各约束条件,最后利用CarSim与MATLAB/Simulink平台进行联合仿真,验证控制效果。
2 车辆动力学建模
整车属于复杂的系统,因此在进行车辆动力学建模时,需要对模型进行一定程度的简化。本文主要的研究目标是实现车辆较好、较快地跟踪期望路径,不需要研究车辆的悬架特性;同时,考虑到本文基于模型预测原理进行路径跟踪控制,需要尽可能简化约束以减小计算量。基于此,本文作如下简化:
a.忽略路面的凹凸不平,假设车辆始终行驶在平坦路面上;
b.忽略悬架作用和车辆的垂向运动;
c.忽略车辆本身转向系统的影响,以前轮转角作为系统输入;
d. 假设左、右轮胎完全一致,只考虑轮胎的侧偏特性且工作于线性区;
e.忽略空气阻力和滚动阻力。
用单轨模型描述车辆运动,构建只有纵向、横向、横摆3个自由度的车辆模型,如图1所示。
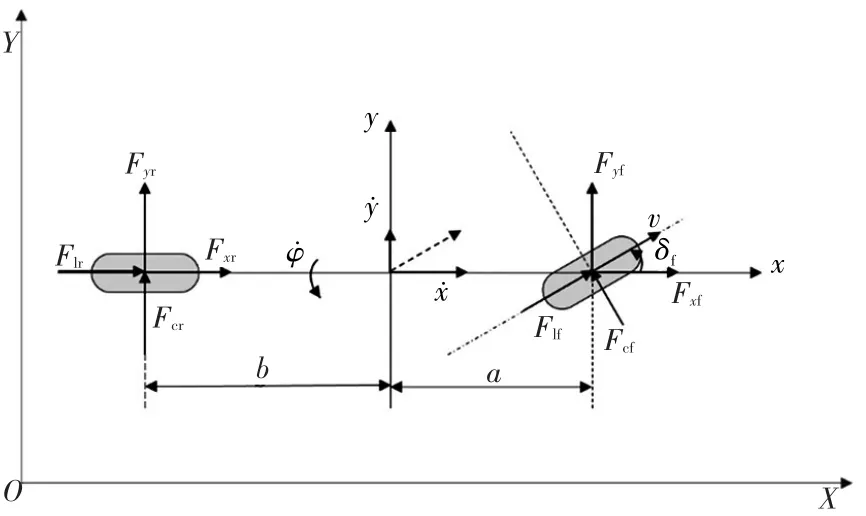
图1 3自由度车辆模型
据此建立的车辆动力学模型为:
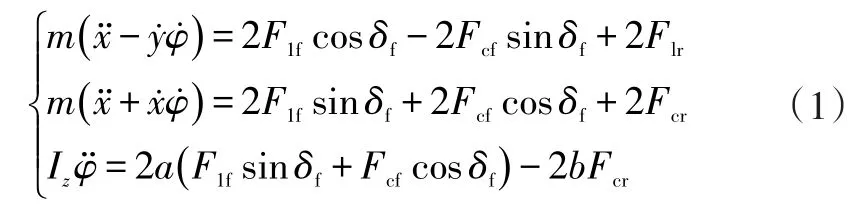
其中,Fcf、Fcr分别为车辆前、后轮胎所受的侧向力,与轮胎的侧偏刚度、侧偏角有关;Flf、Flr分别为车辆前、后轮胎所受纵向力,与轮胎的纵向刚度、滑移率有关;Fxf、Fxr分别为车辆前、后轮胎在x方向所受的力;Fyf、Fyr分别为车辆前、后轮胎在y方向所受的力;δf为车辆前轮转角;φ为车辆横摆角;a为前轴到质心的距离;b为后轴到质心的距离;Iz为车辆绕乙轴的转动惯量。
根据前文假设,本文涉及的轮胎力用线性函数近似表示。引入侧偏刚度、侧偏角、纵向刚度、滑移率后,轮胎力可以表示为:

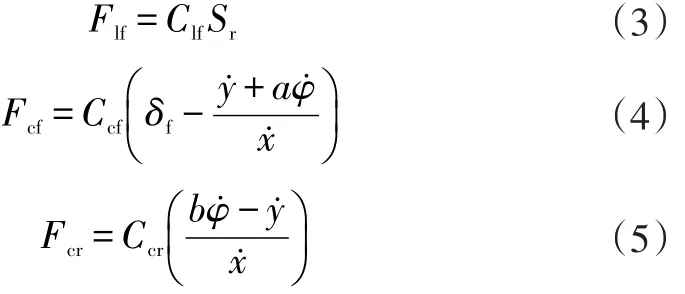
式中,Ccf、Ccr分别为车辆前、后轮胎的侧偏刚度;Clf、Clr分别为车辆前、后轮胎的纵向刚度;Sf、Sr分别为车辆前、后轮胎的滑移率。
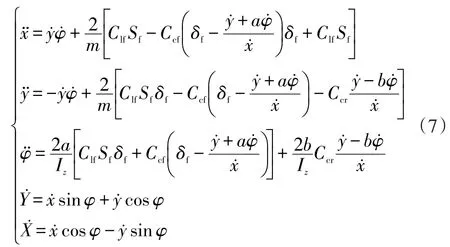
式(1)所描述的车辆动力学模型中存在一些三角函数,影响计算的复杂程度,为了减小计算量,此处假设车辆前轮转角以及轮胎侧偏角均处于较小的角度区间,所以三角函数可转换成:

至此,车辆的动力学方程转变为:
3 控制器设计
3.1 线性时变模型
以线性时变模型作为预测模型的控制算法叫做线性时变模型预测控制算法。相较于非线性模型预测控制,线性时变模型计算更加简单,实时性好,因此应用相当广泛[8]。
前文所得车辆模型为非线性模型,经过线性化得到线性时变方程:

式中,A(t)=∂f/∂ξ;B(t)=∂f/∂u;C=(0,0,0,0,1,0)T。
对线性时变方程采用一阶差商的方法进行离散化后得到离散的状态空间方程:

式中,A(k)=I+TA(t);B(k)=TB(t);T为采样周期;I为单位矩阵。
引入增量模型后,状态空间方程为:

3.2 预测方程
预测方程是模型预测控制中的重要部分,需计算出未来一段时间系统的输出。先将式(9)转换成:

至此可以得到新的状态空间表达式:

根据模型预测控制的基本理念,设Np为预测时域,Nc为控制时域,Nc≤Np。定义k时刻时系统输出为:

定义k时刻系统输入为:
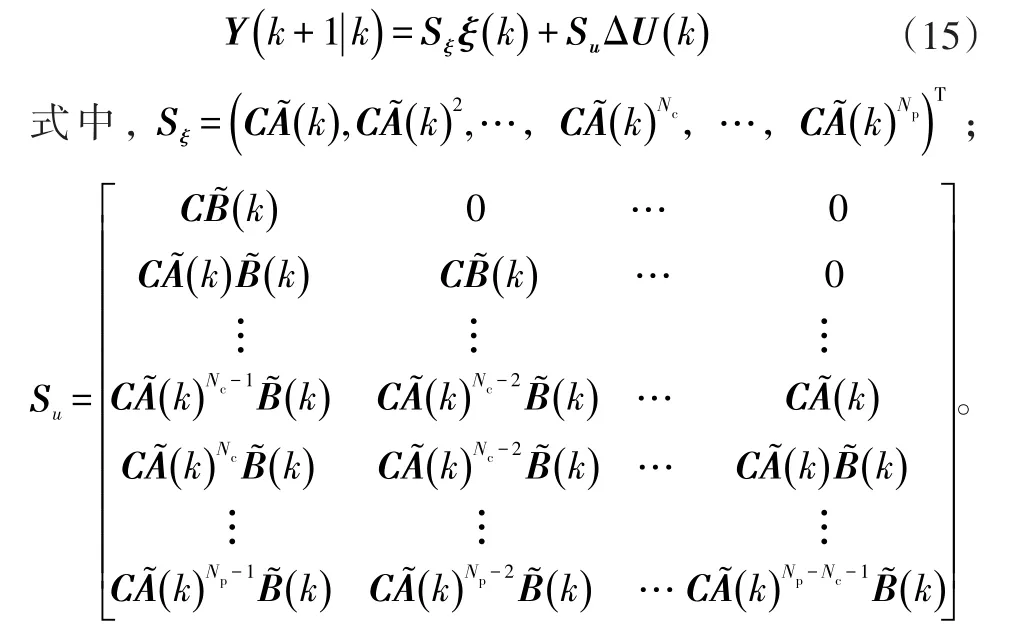
依据模型预测控制原理的基本相关理论可以得到系统未来k时刻的输出方程为:
3.3 构建约束条件
在设计模型预测控制器时,除了考虑控制量及其增量的约束,还需考虑车辆的动力学约束。由于前文进行动力学建模时,轮胎部分的动力学特性采用了近似直线的表达式,所以首先引入轮胎侧偏角约束。
此外,汽车的操纵稳定性不仅关系到行驶时的操纵方便,也决定着车辆高速行驶下的安全性能,同时,决定了车内乘员的乘坐舒适性。因此,本文除了正常的动力学约束外,同时引入质心侧偏角约束和路面附着条件约束,以保证车辆的操稳特性和乘坐舒适性。
各约束条件如下:
a.轮胎侧偏角约束
根据轮胎的侧偏特性,在轮胎侧偏角不超过5°时,侧偏角与侧偏力成线性关系。根据前文构建动力学模型时提出的小角度约束,设定前轮侧偏角约束条件为:-2°≤β≤2°。
b.质心侧偏角约束
质心侧偏角影响着车辆的稳定性,某公司关于车辆稳定性研究得出的结果显示:在附着条件良好的干燥沥青路面上,车辆稳定行驶的质心侧偏角极限可以达到±12°;而在附着系数较低的冰雪路面上,极限值近似为±2°[9]。考虑到实际正常行驶时,达不到极限区间,故本文将质心侧偏角的约束条件设置为:-10°≤β≤10°(良好路面),-1°≤β≤1°(冰雪路面)。
c.附着条件约束
汽车的动力性能还受到路面附着系数的影响。路面附着条件较好时,该因素对车辆行驶影响不大,当条件较为恶劣时,则会对车辆的动力性和乘客的舒适性产生影响[9]。此外,限定过小的约束条件会造成控制器的求解失败。因此,本文将路面附着系数的约束设置为软约束。当车辆纵向匀速行驶时,车辆的侧向加速度和路面附着系数存在以下关系:

因此,可以将路面附着条件约束写成:

至此,将所有约束纳入二次规划的求解过程。
3.4 模型预测控制器
由于车辆动力学模型本身的复杂性,在设计目标函数时加入松弛因子,得到目标函数为:

综合考虑目标函数和约束条件,控制器需要在每个控制周期内需解决:
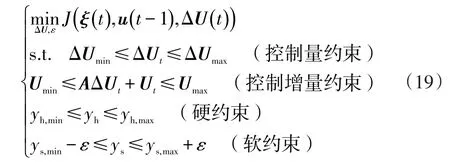
在每个控制周期内,系统都需对优化问题(19)进行求解,求解结果为控制时域内的一系列包含控制增量和松弛因子的控制序列,该序列的第1个元素将作为实际的控制增量作用于系统。进入到下一个周期后,系统重复上述过程,循环实现车辆对目标路径的跟踪。
4 仿真结果
本文选取双移线作为目标路径,仿真时,路面附着系数取0.85,车辆的初始位置为坐标原点,控制器的预测时域Np=20,控制时域Nc=3,分别以18 km/h、36 km/h、54 km/h的纵向速度进行联合仿真,控制器其他参数如表1所示。
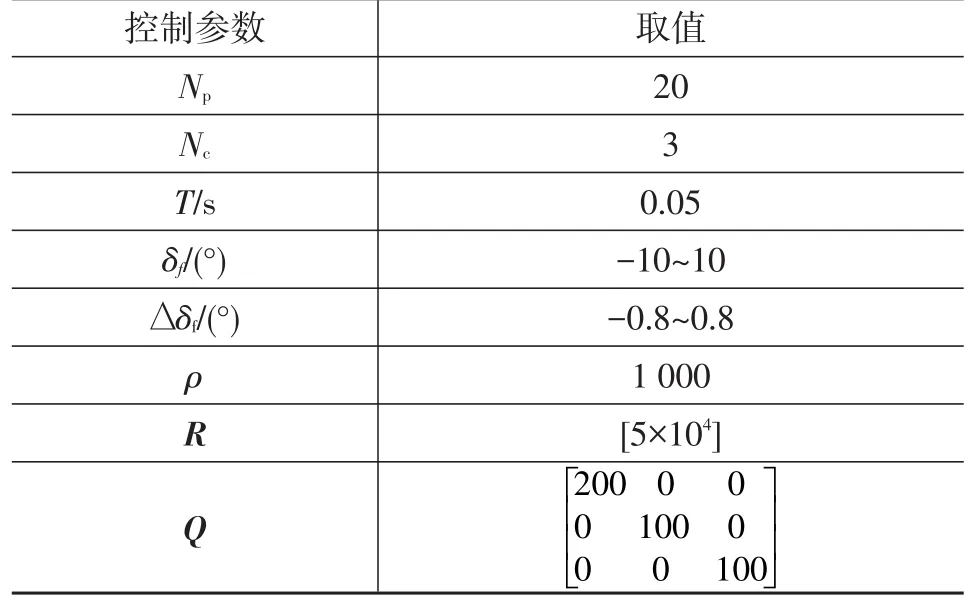
表1 控制器参数
为了验证本文提出的模型预测控制器在路径跟踪上的控制效果,以基于实车参数搭建的3自由度车辆模型作为控制对象,在CarSim平台和MATLAB/Simulink平台进行联合仿真,仿真结果如图2所示。
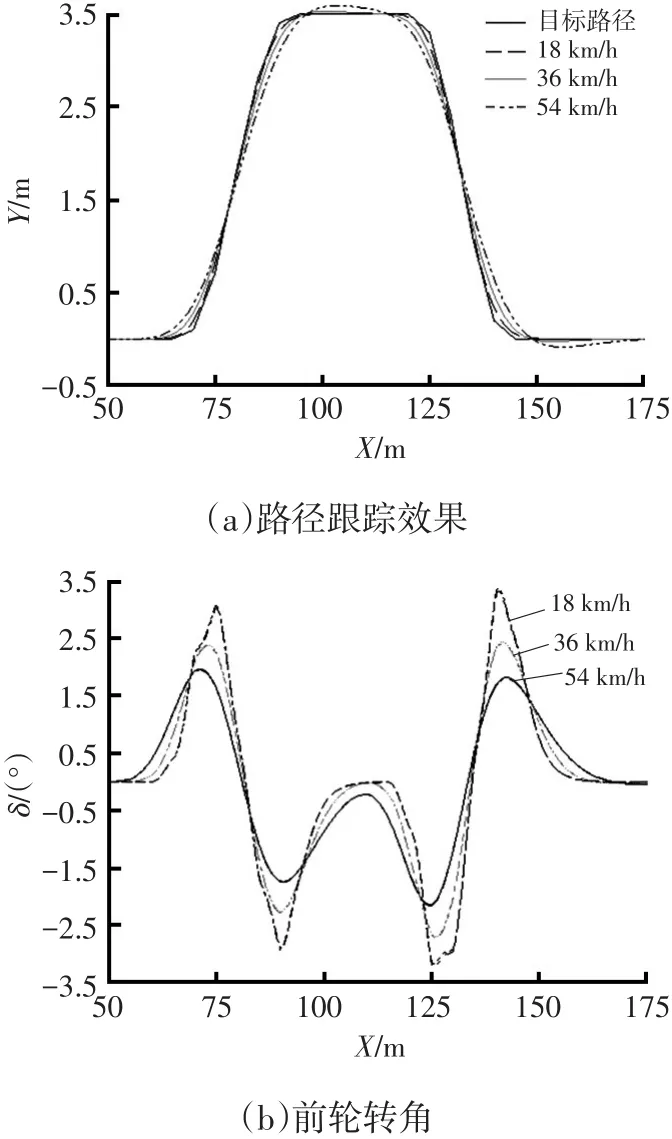
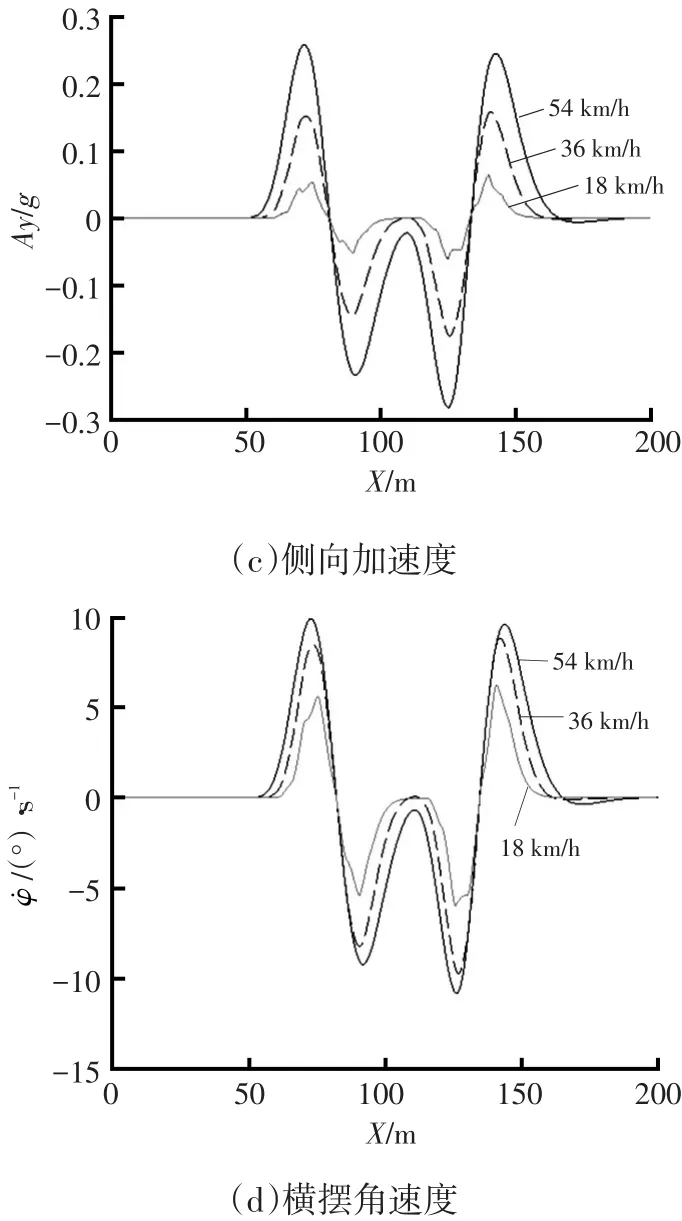
图2 不同速度下双移线工况仿真结果
图2a表明,3种速度工况下车辆都能较好地进行路径跟踪,但在弯道处易出现微小偏差,且偏差随速度的增加而增大,最大偏差为0.1 m,相对于1.87 m的车身宽度可以忽略。
图2b表明,随着速度的增加,转角开始变化的位置前移,由于内、外车轮的行程不同,左、右轮的转角变化必然存在微小差异。图2c表明,随着速度的增加,侧向加速度也在增加,但始终保持在±0.3g的较小范围内。图2d表明,横摆角速度变化也很平稳。
由图2b~图2d可以看出,前轮转角、横摆角速度、侧向加速度虽然出现了抖动,但均在较小范围内,说明该控制器控制下的车辆在运行过程中处于良好的稳定状态。抖动原因可能是较大的侧向加速度使轮胎侧偏特性突然处于非线性区,对此,可以考虑适当增加车辆横摆角的约束,并调整控制器控制时域。
此外,当车辆以18 km/h行驶时,车辆的前轮转角、侧向加速度以及横摆角速度均对应在弯道处出现抖动,原因可能是车辆低速行驶时几乎完全跟踪目标路径,变化灵敏。
综上,该控制器的控制效果完全可以满足中低速情况下智能车辆路径跟踪的鲁棒性和操纵稳定性要求。
5 结束语
本文针对智能车辆的路径跟踪问题,提出了一种基于模型预测控制的路径跟踪控制器,搭建了车辆3自由度动力学模型,并在CarSim和MATLAB/Simulink平台上进行联合仿真。结果表面,本文所设计的路径跟踪控制器可以保障车辆在中低速时具有较好的鲁棒性和操纵稳定性,同时满足乘员对乘坐舒适性的要求。但实际情况下,车辆的速度会高于仿真车速,因此该控制器需要进一步完善,提高其高速行驶下路径跟踪的鲁棒性和稳定性,这也是本文的后续研究之一。
1 余如.无人驾驶车辆的自动转向控制:[学位论文].长春:吉林大学,2016.
2 Marino R,Scalzi S,Netto M.Nested PID steering control for lane keeping in autonomous vehicles.Control Engineering Practice,2011,19(12):1459~1467.
3 姜岩,赵熙俊,龚建伟,等.简单城市环境下地面无人驾驶系统的设计研究.机械工程学报,2012,48(20):103~112.
4 孙银健.基于模型预测控制的无人驾驶车辆轨迹跟踪控制算法研究:[学位论文].北京:北京理工大学,2015.
5 Macadam C C.Application of an Optimal Preview Control forSimulation ofClosed-Loop Automobile Driving.Systems.IEEE Transactions on Man and Cybernetics,2007,11(6):393~399.
6 Levinson J,Askeland J,Becker J,et al.Towards fully autonomous driving:Systems and algorithms.IEEE Intelligent Vehicles Symposium,Baden-Baden,2011.
7 张亮修,吴光强,郭晓晓.自主车辆线性时变模型预测路径跟踪控制.同济大学学报,2016,44(10):1595~1603.
8 陈虹.模型预测控制.北京:科学出版社,2013.
9 龚建伟,姜岩,徐威.无人驾驶车辆模型预测控制.北京:北京理工大学出版社,2014.
10 席裕庚.预测控制.北京:国防工业出版社,1993.
11 余如,郭洪艳,陈虹.自主驾驶车辆的预测避障控制.信息与控制,2015,44(1):117~124.
(责任编辑 斛 畔)
修改稿收到日期为2017年6月20日。
Design of Intelligent Vehicle Path Tracking Controller Based on Model Predictive Control
Wang Yi,Cai Yingfeng,Chen Long,Wang Hai,Li Jian,Chu Xiaojun
(Jiangsu University,Zhenjiang 212013)
In order to improve the robustness of intelligent vehicle path tracking,this paper proposed a path tracking control method for intelligent vehicle based on model predictive control principle.By linearizing 3-degree-of-freedom nonlinear dynamic model of the vehicle,this method obtained a linear time-varying model and the prediction equation.Next,constraints including the control quantity and the control increment,etc.,were included in the quadratic programming solution process,considering the side slip angle and the road adhesion coefficient which had impact on vehicle handling stability.Finally,co-simulation with different vehicle speeds was carried out under the conditions of double lane change on the CarSim and MATLAB/Simulink platforms.The results show that the controller can realize the path tracking accurately with good stability.
Autonomoussteering,Path tracking,Model predictivecontrol,Intelligent vehicle
自动转向 路径跟踪 模型预测控制 智能车辆
TP242.6 文献标识码:A 文章编号:1000-3703(2017)10-0044-05
国家自然科学基金项目(U1564201)。
