直升机/舰船耦合流场的数值模拟
2017-11-22苏大成史勇杰徐国华宗昆
苏大成,史勇杰,徐国华,*,宗昆
1.南京航空航天大学 直升机旋翼动力学国家级重点实验室,南京 210016
2.中国船舶工业系统工程研究院,北京 100036
直升机/舰船耦合流场的数值模拟
苏大成1,史勇杰1,徐国华1,*,宗昆2
1.南京航空航天大学 直升机旋翼动力学国家级重点实验室,南京 210016
2.中国船舶工业系统工程研究院,北京 100036
发展了一套基于雷诺平均Navier-Stokes(RANS)方程的直升机/舰船耦合流场数值模拟方法,采用ROEMUSCL格式对交接面通量进行重构,并采用k-ε湍流模型以提高对涡流场的捕捉精度,直升机旋翼等旋转部件的模拟使用动量源模型。然后,以具有典型驱护舰结构的LPD-17及ROBIN直升机的组合为研究对象,从涡量场、速度场及压力场等方面分析了直升机、舰船耦合情形下的流场特征。研究表明,当来流速度V∞≥4 m/s时,舰船流场进入雷诺数自准区,流场速度无因次化量基本保持不变;直升机着舰时,旋翼会与舰船艉部的涡回流区以及甲板两侧的舷涡发生较强的“涡-涡干扰”,在上述干扰以及舰面效应的共同作用下,旋翼拉力产生显著的振荡,并呈现出先减小、后增大的变化特征;当着舰位置向舰尾移动时,艉部回流区的影响减弱,旋翼拉力振荡幅度相应减小。最后,对全机状态下的耦合流场进行了模拟,结果显示机身和尾桨对舰艉流场的主要结构影响较小,可用旋翼/舰船耦合流场来进行直升机安全着舰分析,这将显著缩短计算时间。
直升机;舰船;舰艉流;动量源方法;着舰飞行
海面空气流经舰船上层建筑、机库等钝体结构时,受气流分离的影响,会在舰体附近及其下游区域形成不同程度的紊流区域。当直升机着舰时,直升机非定常涡流场与舰艉流场相互干扰耦合,使得舰艉紊流区域的流场品质进一步降低。受这种耦合流场的影响,直升机各部件气动力的大小及分布将发生显著变化,使得其操稳特性明显降低,从而危及着舰安全。因此,开展直升机/舰船耦合流场特征研究对于直升机安全着舰飞行具有重要意义。
目前,国内外在孤立舰船流场已开展了较多的研究。Reddy等[1]采用FLUENT对简单舰船(SFS)模型的流场进行数值模拟,重点研究了舰船尾流场的速度场特征,验证了飞行甲板上方马蹄涡的存在。Zhang等[2]采用Cobalt求解器对SFS2舰船流场进行了数值模拟,研究了风向角对舰尾流场特征的影响。Polsky[3]对大型两栖攻击舰(LHA)模型在不同风速情况下的流场进行数值模拟,结果显示,在一定风速范围内,舰船流场结构与雷诺数无关。此外,郜冶和刘长猛[4]、黄斌等[5]研究了机库门开关情形下舰艉流场的速度场特征,发现机库门敞开有利于改善飞行甲板上方的流场。尽管对于孤立舰船流场的研究已比较深入,但将舰船流场数据应用到直升机着舰飞行动力学模型时,所得到的操纵量与试验值相比仍有较大误差[6],这主要是由于未考虑直升机与舰艉流场耦合对流场特征的影响。近年来,随着CFD技术在直升机非定常流场模拟中的成功应用[7-10],研究者又逐渐将CFD方法应用于直升机/舰船耦合流场的研究中。Lee和Silva[11]采用运动嵌套网格方法[12]研究了旋翼/舰船耦合流场的压力场及速度场特征,同时也指出了运动嵌套网格方法耗时过长的缺点。Crozon等[13]分别采用动量源方法[14]与运动嵌套网格方法对旋翼/舰船耦合流场进行了数值模拟及对比,结果表明动量源方法能够有效地捕捉到耦合流场的主要特征。国内的孙鹏等[15]采用FLUENT软件对旋翼/舰船耦合流场进行了数值模拟,研究了不同风向角情形下的旋翼/舰船耦合流场特征,并分析了直升机着舰过程中的舰面效应对旋翼气动力的影响。文中采用的是具有直通式甲板结构的舰船模型,上层建筑比较简单,因此旋翼/舰船耦合流场并不复杂。至目前,关于直升机/舰船耦合流场的研究还较少,且主要集中于数值方法研究方面,对于着舰过程中直升机与舰艉流间的相互干扰机理以及耦合舰艉流场的复杂流动特征研究则涉及很少。
本文以具有典型驱护舰结构的LPD-17登陆舰模型和ROBIN直升机为研究对象,对直升机着舰过程中的复杂干扰特征进行研究。首先,发展一套适用于直升机/舰船耦合流场特征计算的CFD分析模型,其中直升机旋转部件(旋翼、尾桨)的模拟采用动量源模型。然后,分别对孤立舰船流场以及旋翼/舰船耦合流场进行数值模拟,着重从涡量场、压力场和速度场等方面研究孤立舰船流场结构以及旋翼对舰尾流场的干扰特征,并分析舰艉流场的空间特性对旋翼气动力的影响;最后开展全机条件下的机/舰耦合流场特征的研究,分析机身和尾桨对舰艉流场的扰动幅度以及影响范围,以期望得出一些对直升机安全着舰分析有意义的结论。
1 数值计算方法及验证
1.1 流场控制方程

式中:W、Fc和Fv分别为守恒变量、对流通量和黏性通量;R为动量源项;它们的表达式分别为
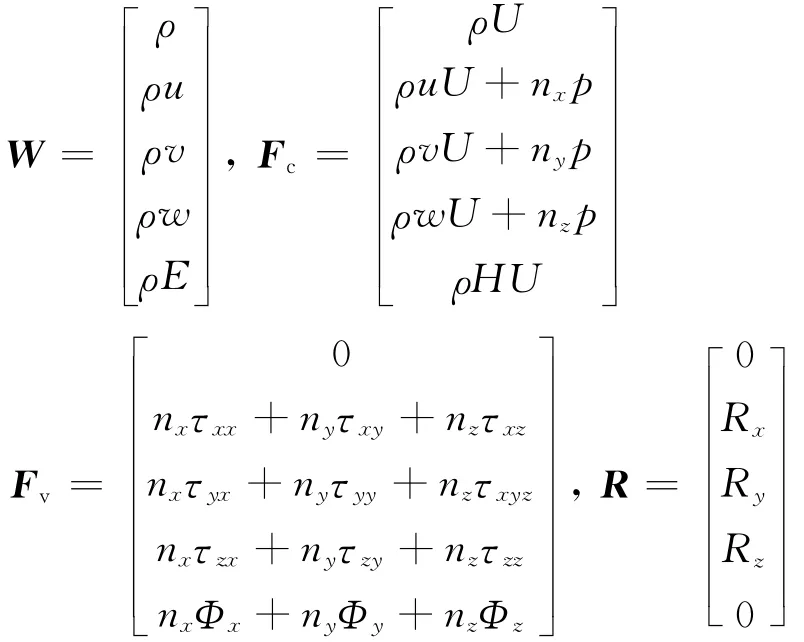
式中:ρ和p分别为流体密度和压强;u、v和w为速度在x、y和z方向的分量;U为桨叶在计算位置上与流体的相对速度;E为单位体积总能;H为单位体积总焓;n=[nxnynz]为控制面的法向矢量;τ为黏性应力;Φ为黏性力和热传导对流体的功;Rx、Ry和Rz分别为动量源项R在x、y和z方向上的分量。
直升机旋翼和尾桨部件的模拟是本文方法建立的关键,文中采用“动量源模型”以对其进行模拟。在该方法中,将旋转的桨叶(旋翼或尾桨)简化成无限薄的作用盘,桨叶对气流的非定常作用被等效为时间平均的动量源项加到控制方程的右侧。动量源项的表达式为

式中:F为桨叶剖面对气流的作用力;N为桨叶片数;r为桨叶半径;S′为网格单元的面积。
采用具有空间二阶精度的MUSCL插值方法对流场进行数据重构,并采用ROE格式[16]计算网格控制面上对流通量以减小非物理耗散的影响;时间推进采用隐式LU-SGS格式[17];湍流模型采用k-ε两方程模型[18],以提高对流场特征的捕捉精度。
1.2 计算方法验证
由于缺少旋翼/舰船耦合流场的试验数据,本文以孤立舰船(SFS2)[19]以及NASA的ROBIN旋翼/机身干扰试验[20]为算例对方法进行验证。具体的模型尺寸在文献中均有详细描述。
图1给出了SFS2舰船模型在来流速度为12.87 m/s、风向角为0°状态下的等值涡量图,图2给出的是不同位置处的速度云图,图3进一步给出了SFS2甲板上方10.668 m(35 ft)处的速度分布。其中,图3横坐标为偏离甲板中心的距离y与甲板宽度b的比值,纵坐标表示速度分量的无因次量,V∞为自由来流速度。可以看到,数值计算(Cal.)获得的速度分布与实验值(Exp.)基本吻合,表明本文所建立的方法可以有效地用于舰船流场模拟。此外,从图中还可以看到:气流经过机库顶端时发生分离,在机库后方形成尺度较大的涡结构(见图1);在涡流区内流场平均速度较小,随着气流向舰船后方流动,其受上层建筑的影响减小,气流速度逐渐回升(见图2)。应当指出的是,计算值与实验值在幅值上存在一些误差,这与计算所使用的网格数量以及流场控制方程均有关系。
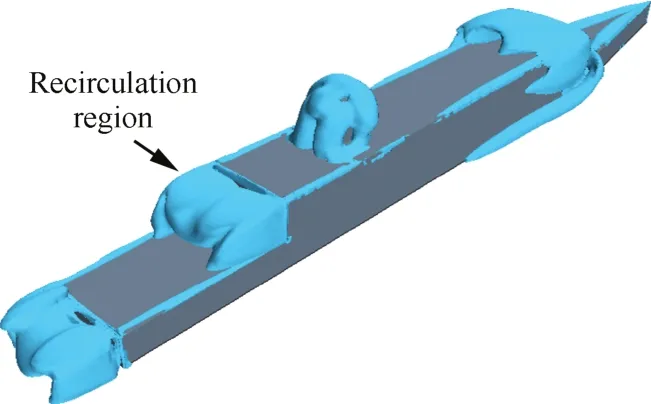
图1 SFS2等值涡量图Fig.1 Iso-surfaces of vorticity for SFS2
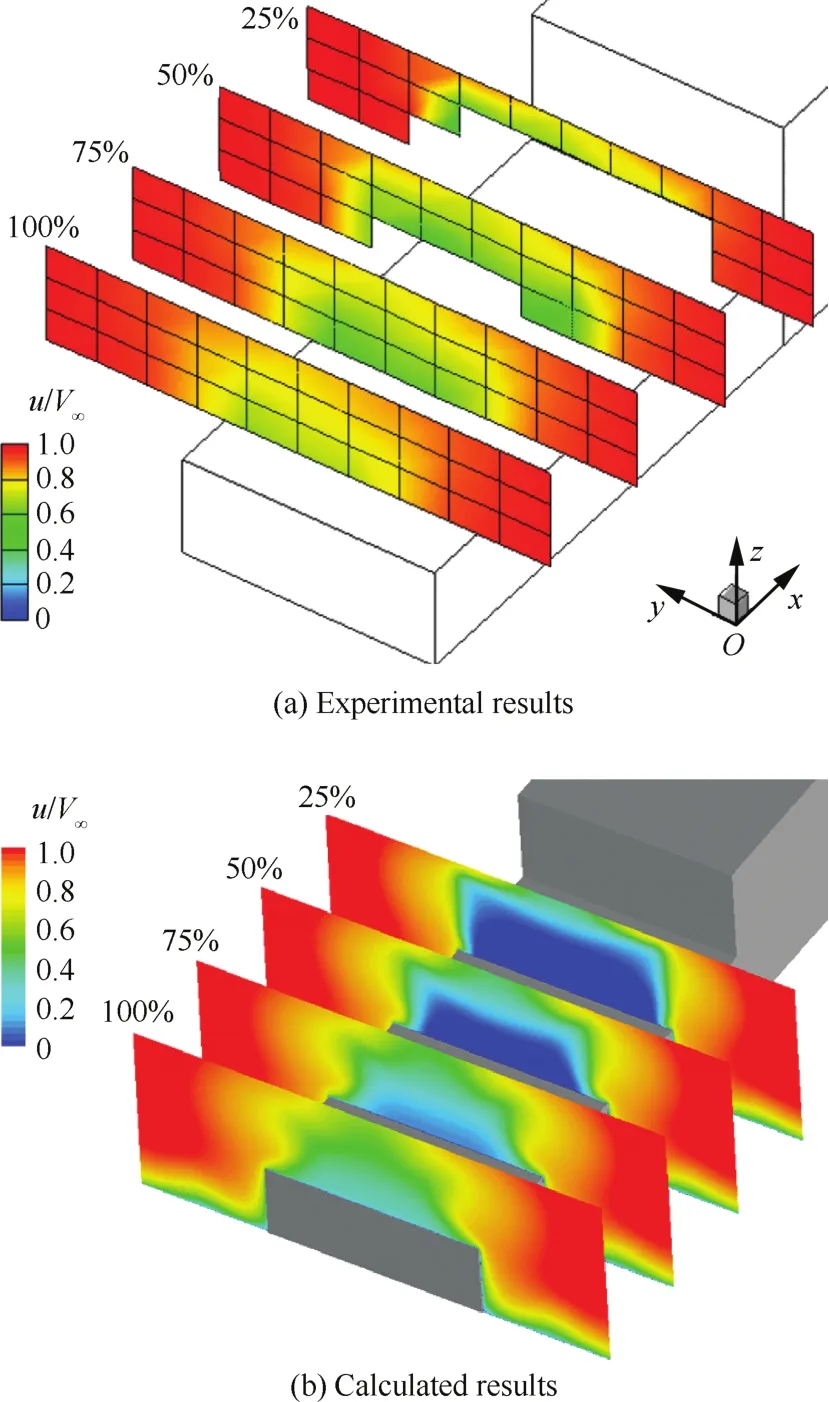
图2 不同截面沿来流方向速度云图计算与实验结果对比Fig.2 Comparison of calculated and experimental results of streamwise velocities distributions at different planes
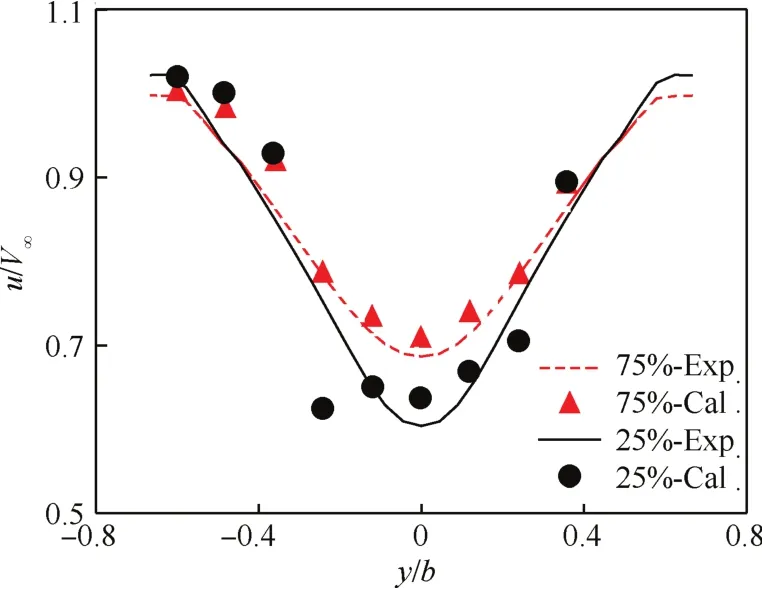
图3 不同截面上距甲板高度35 ft处甲板上方流向速度分布计算与实验结果的比较Fig.3 Comparison of calculated and experimental results of streamwise velocities at different planes and at 35 ft above deck

图4 ROBIN直升机在前飞状态下压力系数计算结果与实验结果的对比Fig.4 Comparison of calculted and experimental results of pressure coefficients for ROBIN helicopter at flight state
图4给出的是ROBIN直升机在前进比μ=0.15、桨尖马赫数Matip=0.53时对称平面上的压力分布云图(参考压力为标准大气压力)以及机身在x=0.35R横截面上的压力分布。横坐标表示机身高度z与旋翼半径R的比值。由图4可见,由于机身对旋翼下洗流的阻挡,旋翼与机身间存在较强的气动干扰;本文的计算结果比较准确地预测了机身表面压力分布的变化趋势,表明动量源方法能够比较有效地模拟干扰流场。
2 结果讨论与分析
2.1 计算模型及网格划分
本文采用具有典型驱护舰结构的LPD-17登陆舰缩比模型来研究舰船流场特征,舰船长度L=20 m,甲板长度L1=6.4 m,宽W=3.2 m,机库门的高度H=1.6 m;直升机采用1.2节中的ROBIN模型,其中旋翼半径为0.861 m,桨叶翼型为NACA0012,根切为0.206 6 m,弦长为0.066 3 m。尾桨布局采用轻型直升机常用的低位布置方式,转向为底部向前,尾桨半径为旋翼的1/5。坐标系原点位于飞行甲板尾部中点处,x轴沿着舰船对称轴指向舰船后方,y轴指向舰船右舷,z轴垂直于甲板向上,为了便于观察耦合流场特征,设置了A、B、C、D 4个监测平面,在飞行甲板上方所处的位置分别为x/H=-3.125,-2.065,-1.0,0,如图5所示。

图5 计算模型示意图Fig.5 Schematic of computational model

图6 舰船表面和海平面网格细节Fig.6 Details of grid for ship and sea surface
计算网格由ANSYS ICEM生成,如图6所示。为了能够较准确地捕捉到直升机/舰船耦合流场特征,分别在舰船着舰域以及直升机附近区域进行了网格加密,船体表面边界层内第一层网格高度为5 mm,保证满足湍流模型计算所使用壁面函数的y+条件。LPD-17的网格总数为6.5×106。考虑到大气边界层的影响,将海平面处理为黏性壁面,远流场边界则采用无反射边界条件进行计算。为了便于研究舰船典型流场结构以及直升机/舰船流场干扰特征,在本文的计算中舰船保持静止,并且忽略了直升机运动学和动力学问题。
2.2 来流速度对舰艉流场的影响
本文首先对不同来流速度下孤立舰船艉流场结构进行了研究。所选取的计算状态为:风向角为0°,风速的变化范围为1 m/s≤V∞≤30 m/s。为了便于研究,在舰船的对称平面上、距离甲板高度为0.5H 处选取5个探测点,分别为:x/H=-3.375,-2.75,-2.125,-1.5,-0.875。
图7显示了各个监测点速度U的无因次化量对来流速度的变化曲线,由于风向角为0°,因此图8仅给出了各监测点沿来流方向速度分量u及垂直方向速度分量w的无因次化量的变化曲线。图中可见,在较小的速度范围内(V∞≤4 m/s),监测点速度无因次化量变化显著,说明在此速度范围内舰尾流场结构不断变化;随着来流速度增大,各监测点速度无因次化量很快趋于常值,这意味着流场结构不再变化。这可能是由于来流速度较小时,流场雷诺数小,气体黏性力影响较大,来流速度改变引起的黏性力变化对流场结构产生显著影响;而当来流速度增大到一定值后,流场进入雷诺数自准区,此时气体惯性力占主导地位,流场结构基本保持稳定。
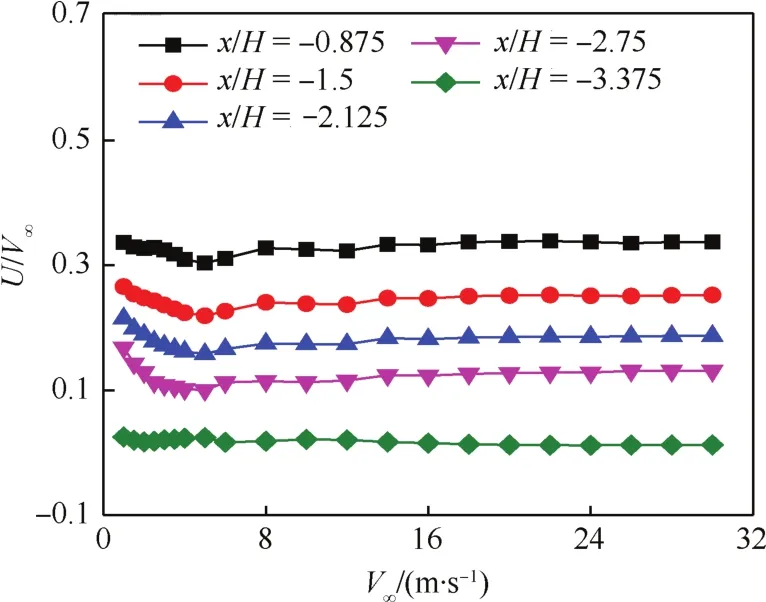
图7 弧立舰船情形下各监测点速度随来流速度的变化Fig.7 Velocity for various freestream velocities at different points for isolated ship
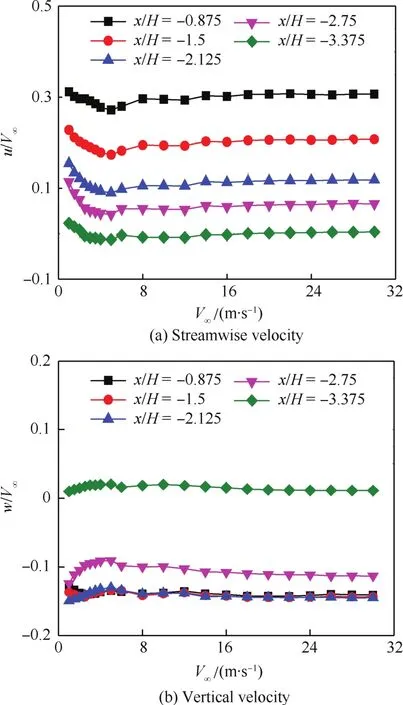
图8 弧立舰船情形下各监测点速度分量随来流速度的变化Fig.8 Velocity components for freestream velocities at different points for isolated ship
图9给出了舰船正常巡航速度(V∞=15 m/s)下的等值涡量图与对称平面(y=0平面)流线图,其中等值涡量图以速度标示。图中可见,气流经过机库上方时由于几何形状的剧烈变化而发生分离,分离后的气流继续向下游流动并在甲板中部区域再附着,从而在机库后方形成封闭的涡流区。由于涡流区内气压较低,导致飞行甲板下方的气流向上绕过船体并在其两侧形成旋向相反的舷涡。

图9 孤立舰船情形下的等值涡量图与对称平面流线图Fig.9 Iso-surfaces of vorticity and streamlines on symmetry plane for isolated ship
2.3 旋翼、舰艉耦合流场分析
本节重点针对直升机着舰过程中旋翼/舰船尾流的耦合干扰特征以及舰艉流对旋翼气动特性的影响规律进行分析。
图10给出了来流速度为15 m/s、风向角为0°时旋翼/舰船耦合情形下的等值涡量图(以速度标示)与对称平面(y=0平面)流线图。其中,旋翼桨尖马赫数Matip=0.53,总距为10.3°。从图中可以看到,相对于孤立舰船情形,从旋翼两侧端部脱落的强集中涡与舰艉涡产生较强的“涡-涡干扰”,使得甲板上方的流场发生显著变化:一方面,由于旋翼强集中涡的旋向与甲板两侧的舷涡相同,使得耦合后的涡能量增强、尺寸显著增大(见图10(a));另一方面,部分旋翼处于涡流区中,使得其下方流场的下洗分量显著增大,导致气流再附着点前移,从而造成机库后方涡流区的尺寸显著缩减(见图10(b))。

图10 旋翼/舰船耦合情形下的等值涡量图与对称平面流线图Fig.10 Iso-surfaces of vorticity and streamlines on symmetry plane for rotor/ship coupled case
为了直观地分析旋翼涡与舷涡的相互干扰特征,图11给出了过旋翼中心截面(x/H=-2.065)的涡量分布云图。图中可见,在旋翼强集中涡与舷涡相互耦合的区域出现局部涡量比较小的现象,这是由于两者旋向相同,在相互靠近的过程中会在局部区域出现旋向相反从而相互削弱的情形;此外,图11(b)显示截面内涡量分布并不对称,右侧涡量略高于左侧,这主要是由于旋翼旋转方向为右旋所导致的。值得注意的是,在本文的研究中采用的是典型驱护舰结构,旋翼直径和甲板宽度比较接近,因此旋翼的强集中涡从桨尖脱落后能够比较容易地与舷涡发生干扰,形成较强的“涡-涡干扰”现象,若载机舰为航母或大型登陆舰时,飞行甲板面积充裕、上层建筑简单,使得旋翼的强集中涡与舷涡相距较远,这会导致两者的干扰现象明显减弱。
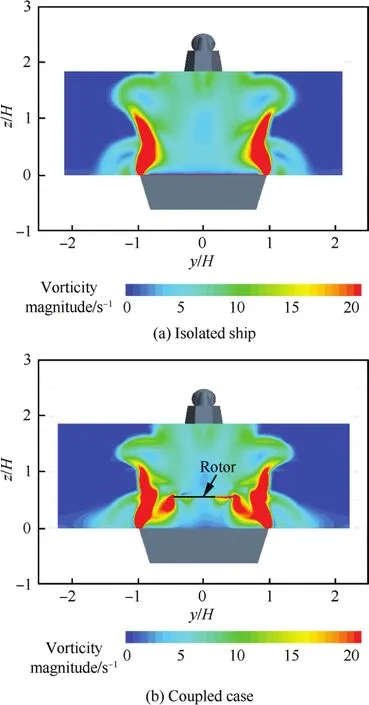
图11 x/H=-2.065截面涡量分布云图Fig.11 Distribution of wake vorticity for x/H=-2.065

图12 两种情形下舰船甲板压力分布Fig.12 Distribution of surface pressure on deck for two cases
图12给出了有、无旋翼干扰下的舰船甲板压力分布。由于旋翼的下洗流向下后方流动并作用到甲板上,导致甲板中后部出现较大范围的高压区域;而甲板对下洗流的阻挡使得一部分下洗流向机库流动,造成涡流区内流场流速增加、静压降低,从而在飞行甲板上形成了“前低后高”的压力分布特征。当直升机前端进入涡流区时,受这种压力分布特征的影响,前端压强会明显降低,使得机身阻力减小从而导致直升机“前冲”,这将对直升机的飞行安全带来不利影响。
接着分析了速度场的特征。图13给出了甲板上方不同位置处的垂向速度w分布云图。引入旋翼影响后,在截面A(x/H=-3.125)中,由于涡流区的流场受旋翼下洗流的影响而气压降低,气流在绕过船体后能够继续向上方流动,导致甲板两侧的上洗速度范围显著扩大;截面B(x/H=-2.065)过旋翼中心,速度场变化最为明显:一方面,由于旋翼对上方气流的吸附作用,使得旋翼上方流场的下洗速度显著增加;另一方面,旋翼下洗流与甲板两侧舷涡相互耦合并被旋翼重新吸入,在旋翼两端形成环流区域,这种阻塞作用还使得旋翼受到舰面效应的影响,使其气动环境更加复杂;在旋翼后方的截面C(x/H=-1.0)中,由于旋翼强集中涡与舷涡同相叠加,在甲板两侧出现了较大范围的上洗速度;截面D(x/H=0)由于离旋翼较远,旋翼尾流对其影响较小,因此有、无旋翼干扰情形下的速度分布差别较小。

图13 两种情形下各监测面垂向速度w分布Fig.13 Distribution of vertical velocity w for different monitoring planes for two cases
图14和图15进一步给出了在舰船对称平面(y=0)和截面B(x/H=-2.065)中距甲板高度为0.594H位置的速度分量分布。从图14(a)可以看到,涡流区内的纵向速度(速度分量u)远小于来流速度。引入旋翼后,旋翼附近的速度分布发生了显著改变,尤其在靠近桨尖区域,速度分量的最大增幅达到来流速度的20%。这表明,旋翼能明显改变着舰域流场特征,在进行直升机着舰飞行特性分析与风限图制作时,若仅将孤立舰船艉流场数据导入到直升机飞行动力学模型中,所得到的操纵量会出现较大的误差。

图14 舰船对称平面(y=0)上距甲板高度为0.594H位置处各速度分量分布(0°偏航)Fig.14 Distribution of velocity components along central plane of ship(y=0)and at 0.594H above deck(0°yaw)

图15 x/H=-2.065平面距甲板高度为0.594H位置处各速度分量分布(0°偏航)Fig.15 Distribution of velocity components across ship on x/H=-2.065 plane and at 0.594H above deck(0°yaw)
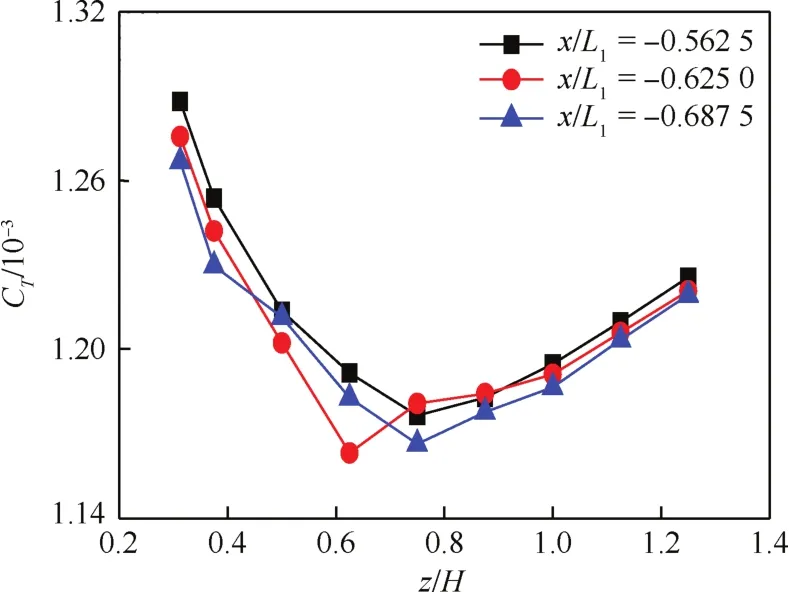
图16 不同着舰点处旋翼拉力系数随高度的变化曲线Fig.16 Thrust coefficients for various altitudes at different landing spots
旋翼在引起艉流场结构变化的同时,自身也会受到舰艉流的影响。图16给出了旋翼拉力系数CT随着舰高度的变化。随着着舰高度降低,旋翼拉力呈现出先减小后增大的变化规律。当z/H≥0.8,旋翼逐渐由自由剪切层进入到涡流区,其相对来流速度不断减小,使得旋翼拉力系数逐渐降低;当高度继续下降时,舰面效应的影响逐渐增强,旋翼拉力又开始回升。从定量分析可知,着舰过程中旋翼拉力系数变化幅度达到10%,这意味着驾驶员必须给予相应的总距操纵来保持直升机稳定。另外,图中也显示了着舰点对旋翼拉力的影响。当着舰点向舰尾移动时,涡流区对直升机的影响减弱,使得着舰过程中旋翼拉力的振荡幅度减小,这意味着飞行员的工作载荷变小。
2.4 直升机对舰艉流场结构的影响
本节中进一步引入机身和尾桨的影响,对全机条件下的机/舰耦合流场进行数值模拟研究。其中,旋翼的工作状态与前文一致,根据旋翼与尾桨桨尖速度相当的特点,文中给定尾桨转速为旋翼的5倍。
图17和图18分别给出了直升机/舰船耦合流场的等值涡量图(以速度标示)、过尾桨平面(y=-0.044H)以及过尾桨中心平面(z=0.375H)的流线分布。相对于旋翼/舰船耦合情形,机身和尾桨对舰艉流场的改变主要表现为:一方面,尾桨涡、旋翼涡以及左舷舷涡发生干扰耦合,导致甲板左侧局部流场品质降低(见图17);另一方面,机身对旋翼下洗流有显著的阻塞作用,旋翼尾流在经过机身表面时发生流动分离,导致机身下后方局部流场的紊乱程度增加(见图18)。

图17 直升机/舰船耦合流场等值涡量图Fig.17 Iso-surfaces of vorticity for helicopter/ship coupled case
为了进一步分析引入机身和尾桨后舰艉流场的变化特征,图19给出了各监测截面垂向速度分布云图。与旋翼/舰船耦合情形相比,尾桨、机身使其附近的舰艉流场特征发生了改变:在截面B中,由于机身对旋翼下洗流的阻塞作用,在机身下方和顶部出现了不同程度的上洗分量;在截面C中可以看到尾桨尾流向左下方流动并与舷涡发生干扰。图20显示了引入机身、尾桨后的甲板表面的压力分布云图。图中可见,机身对旋翼下洗流的阻挡使得机身下方甲板的压强有所降低;而且,由于尾桨给旋翼尾流附加了侧洗分量,使得甲板上的高压区域整体向左偏斜。
图21和图22分别显示了在舰船对称平面和

图18 直升机/舰船耦合情形下尾桨平面内的流线分布Fig.18 Streamlines on tail disk plane for helicopter/ship coupled case

图19 直升机/舰船耦合情形下各监测面垂向速度分布Fig.19 Distribution of vertical velocity for monitoring planes for helicopter/ship coupled case
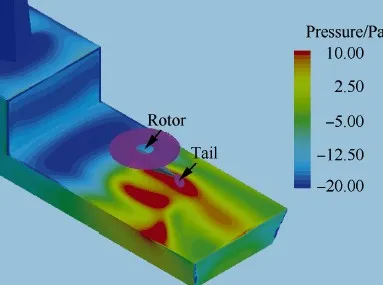
图20 直升机/舰船耦合情形下舰船甲板压力分布

图21 耦合情形下舰船对称面上距甲板0.594H处各速度分量分布(0°偏航)Fig.21 Distribution of velocity components on symmetry plane of ship and at 0.594H above deck for coupled case(0°yaw)

图22 耦合情形下x=-2.065H平面距甲板0.594H处各速度分量分布(0°偏航)Fig.22 Distribution of velocity components across ship on x=-2.065H plane and at 0.594H above deck for couled case(0°yaw)
Fig.20 Distribution of surface pressure on deck for helicopter/ship coupled case监测截面B中距甲板高度为0.594H位置处的速度分量分布。相对于旋翼/舰船耦合情形,尾桨正上方区域流场的下洗分量有所增加,增幅约为来流速度的10%,而其他位置的速度场结构变化不大,尤其是在远离机身和尾桨区域,两种耦合情形下的速度场分布基本一致。这表明,机身和尾桨会使得局部舰艉流场结构发生改变,但对舰艉流场的主要结构影响较小。因此,在进行直升机安全着舰分析时,可用旋翼/舰船耦合流场代替直升机/舰船耦合流场,这将显著提高计算效率。图23进一步给出了机身垂直阻力系数CFz随着舰船高度的变化。图中可见,随着着舰船高度降低,机身垂直阻力经历了先增大、后减小的变化过程。在z/H≥1高度范围内,直升机受涡流区的影响逐渐增强,其相对来流速度不断减小,导致旋翼/机身干扰增强,从而造成机身垂直阻力增加;而随着高度继续降低,舰面效应逐渐增强,旋翼与舰面间流场静压不断增大,使得机身受到附加升力,削弱了旋翼尾流对机身的作用,因此机身垂直阻力不断减小。另外,图中还显示了着舰点对机身垂直阻力的影响。当着舰点向舰尾靠近时,机身的垂直阻力系数减小,这是由于直升机相对来流速度增大,使得旋翼/机身干扰减小所造成的。
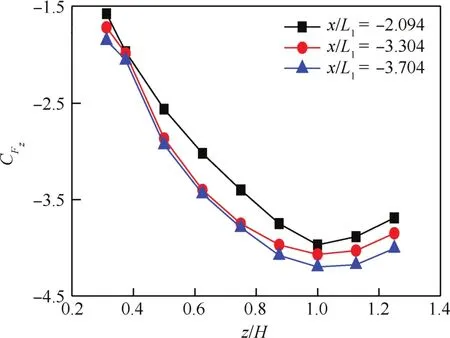
图23 不同着舰点处机身垂直阻力系数随高度的变化Fig.23 Vertical drag coefficients of fuselage for various altitudes at different landing spots
3 结 论
发展了基于CFD技术的直升机/舰船耦合流场数值模拟方法,以具有典型驱护舰结构的LPD-17登陆舰缩比模型和ROBIN直升机为研究对象,从涡量场、速度场以及压力场等方面分别分析了旋翼/舰船情形以及全机状态下的耦合流场特征,可总结结论如下:
1)当来流速度较小(V∞≤4 m/s)时,气体黏性力影响较大,来流速度对流场结构产生显著影响;而当来流速度增大到一定值后,流场进入雷诺数自准区,流场速度无因次化量具有基本不变的特征。这种特征为直升机着舰安全操纵包线的研究提供了一种便捷的途径。
2)着舰时,旋翼下洗流一方面使得甲板上气流的再附着点前移,造成机库后方的涡流区尺寸明显减小;另一方面与两侧舷涡同向叠加并向上卷起,形成了较强的“涡-涡”干扰现象;且甲板的阻塞作用还使得旋翼受到舰面效应的影响,使其气动环境更加复杂。这种现象在小型驱护舰上表现得更为显著。
3)在各种干扰的共同作用下,着舰时旋翼拉力产生显著的振荡,并呈现出先减小、后增大的变化特征。在此过程中,旋翼先由自由剪切层进入到纵向速度较小的涡流区,此时旋翼拉力减小;接近舰面时,舰面效应增强又使得旋翼拉力回升。当着舰位置向舰尾移动,旋翼拉力的振荡幅度减小,这意味着飞行员的工作载荷减小。
4)在全机模拟条件下,机身和尾桨的存在改变了局部流场结构,使得局部流场品质降低,但与旋翼/舰船耦合情形相比,两者对舰艉流的主要流场特征影响较小,因此在直升机安全着舰分析中,可用旋翼/舰船耦合流场代替直升机/舰船耦合流场,这将显著缩短计算时间。
通过上述研究,对直升机/舰船耦合流场的主要结构及干扰特征有了较深入的了解,下一步将围绕舰艉流场的非稳态特性展开研究,并进行旋翼/舰船干扰的风洞试验,与数值模拟结果形成互补,共同分析舰船艉流特性。
[1] REDDY K R,TOFFOLETTO R,JONES K R W.Numerical simulation of ship airwake[J].Computers&Fluids,2000,29(4):451-465.
[2] ZHANG F,XU H,BALL N G.Numerical simulation of unsteady flow over SFS2 ship model[C]//Proceedings of the 47th AIAA Aerospace Sciences Meeting and Including the New Horizons Forum and Aerospace Exposition.Reston:AIAA,2009.
[3] POLSKY S A.A computational study of unsteady ship airwake[C]//Proceedings of the 40th AIAA Aerospace Sciences Meeting and Exhibit.Reston:AIAA,2002.
[4] 郜冶,刘长猛.护卫舰气流场数值计算研究[J].哈尔滨工程大学学报,2013,34(5):599-603.GAO Y,LIU C M.Numerical calculation of frigate ship airwake[J].Journal of Harbin Engineering University,2013,34(5):599-603(in Chinese).
[5] 黄斌,徐国华,史勇杰.机库门开合对舰载直升机着舰域流场的影响研究[J].南京航空航天大学学报,2015,47(2):198-204.HUANG B,XU G H,SHI Y J.Research on influence of hangar door opening and closing on landing flowfield for shipborne helicopters[J].Journal of Nanjing University of Aeronautics&Astronautics,2015,47(2):198-204(in Chinese).
[6] BRIDGES D O,HORN J F,ALPMAN E,et al.Coupled flight dynamics and CFD analysis of pilot workload in ship airwakes[C]//Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit.Reston:AIAA,2007.
[7] YANG A M,YANG X Q.Multigrid acceleration and chimera technique for viscous flow past a hovering rotor[J].Journal of Aircraft,2011,48(2):713-715.
[8] YANG G W,ZHUANG L X.Numerical simulation of rotor flow in hover[J].Journal of Aircraft,2000,37(2):221-226.
[9] 许和勇,叶正寅.悬停共轴双旋翼干扰流动数值模拟[J].航空动力学报,2011,26(2):453-457.XU H Y,YE Z Y.Numerical simulation of interaction unsteady flows around co-axial rotors in hover[J].Journal of Aerospace Power,2011,26(2):453-457(in Chinese).
[10] 樊枫,徐国华,史勇杰.基于CFD方法的直升机旋翼/尾桨非定常气动干扰计算[J].航空动力学报,2014,29(11):2633-2642.FAN F,XU G H,SHI Y J.Calculations of unsteady aerodynamic interaction between main-rotor and tail-rotor of helicopters based on CFD method[J].Journal of Aerospace Power,2014,29(11):2633-2642(in Chinese).
[11] LEE Y,SILVA M.CFD modeling of rotor flowfield aboard ship[C]//Proceedings of the 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition.Reston:AIAA,2010.
[12] MEAKIN R L.A new method for establishing intergrid communication among systems of overset grids:AIAA-1991-1586-CP[R].Reston:AIAA,1991.
[13] CROZON C,STEIJL R,BARAKOS G N.Numerical study of helicopter rotors in a ship airwake[J].Journal of Aircraft,2014,51(6):1813-1832.
[14] BRÉZILLON J.Simulation of rotor-fuselage interactions by using an actuator disk[C]//26th European Rotorcraft Forum.Hague:Netherlands Association of Aeronautical Engineers,2000.
[15] 孙鹏,耿雪,赵佳,等.风向对直升机旋翼与甲板流场结构影响[J].航空动力学报,2015,30(8):1802-1810.SUN P,GENG X,ZHAO J,et al.Influence of wind directions on the flow field structures of helicopter rotor and deck[J].Journal of Aerospace Power,2015,30(8):1802-1810(in Chinese).
[16] ROE P L.Approximate Riemann solvers,parameter vectors,and difference schemes[J].Journal of Computational Physics,1981,43(2):357-372.
[17] JAMESON A.Time dependent calculations using multigrid,with applications to unsteady flows past airfoils and wings:AIAA-1991-1596[R].Reston:AIAA,1991.
[18] KRISHNAMURTY V S,SHYY W.Study of compressibility modifications to the k-εturbulence model[J].Physics of Fluids,1997,9(9):2769-2788.
[19] ZHANG F,XU H,BALL N G.Numerical simulation of unsteady flow over SFS 2 ship model:AIAA-2009-1981[R].Reston:AIAA,2009.
[20] MINECK R E,GORTON S A.Steady and periodic pressure measurements on a generic helicopter fuselage model in the presence of a rotor:NASA/TM-2000-210286[R].Washington,D.C.:NASA,2000.
Numerical simulatin of coupled flow field of helicopter/ship
SU Dacheng1,SHl Yongjie1,XU Guohua1,*,ZONG Kun2
1.National Key Laboratory of Science and Technology on Rotorcraft Aeromechanics,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China
2.System Engineering Research lnstitute,China State Shipbuilding Corporation,Beijing 100036,China
A computational method based on Reynolds-Averaged Navier-Stokes(RANS)equations is developed for the study of aerodynamic interaction between helicopter and ship,wherein ROE-MUSCL scheme is used to reconstruct the flux at the interface,and k-εturbulence model is used to improve the simulation precision for flow structure.Actuator disk method is used to simulate the main rotor and tail.A scaled LPD-17 ship and ROBlN helicopter are then used to simulate the coupled flow field.The coupled flow field characteristics are analyzed,inlucing vorticity,velocity and pressure fields.Analysis results indicate that when the freestream velocity is greater than 4 m/s,Reynolds number of ship flowfield comes into the prospective area of Reynolds number the normalized velocity components of the ship flow field remain unchanged;during the landing process,the main rotor will interact with the large recirculation zone and the deck-edge vortices,and these interactions as well as ground effect cause the rotor thrust to oscillate,and the oscillation shows a regularity of increase first and then decrease.When the landing spot moves to the stern,the effect of the recirculation zone diminishes,thus causing reduction of the amplitude of thrust oscillation.Simulation of the interaction between full aircraft and ship is conducted.Results show that fuselage and tail have slightly influence on the characteristics of the main flow field;therefore,the coupled flow field of rotor/ship can be used to analyze the safety during shipborne operations,and the computation time can thus be shortened significantly.
helicopter;ship;ship airwake;actuator disk method;shipborne operation
2016-10-13;Revised:2016-11-05;Accepted:2017-01-11;Published online:2017-03-09 08:52
URL:www.cnki.net/kcms/detail/11.1929.V.20170309.0852.002.html
s:National Key Laboratory Foundation of Science and Technology on Rotorcraft Aeromechanics(6142220010301)
V211.52;O351
A
1000-6893(2017)07-520853-12
10.7527/S1000-6893.2017.120853
2016-10-13;退修日期:2016-11-05;录用日期:2017-01-11;网络出版时间:2017-03-09 08:52
www.cnki.net/kcms/detail/11.1929.V.20170309.0852.002.html
直升机旋翼动力学国家级重点实验室基金(6142220010301)
*通讯作者.E-mail:ghxu@nuaa.edu.cn
苏大成,史勇杰,徐国华,等.直升机/舰船耦合流场的数值模拟[J].航空学报,2017,38(7):520853.SU D C,SHl Y J,XU G H,et al.Numerical simulation of coupled flow field of helicopter/ship[J].Acta Aeronautica et Astronautica Sinica,2017,38(7):520853.
(责任编辑:鲍亚平,徐晓)
*Corresponding author.E-mail:ghxu@nuaa.edu.cn